
基于深度学习与多维信息融合聚类的果实采摘点识别方法.pdf

猫巷****雪凝

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习与多维信息融合聚类的果实采摘点识别方法.pdf
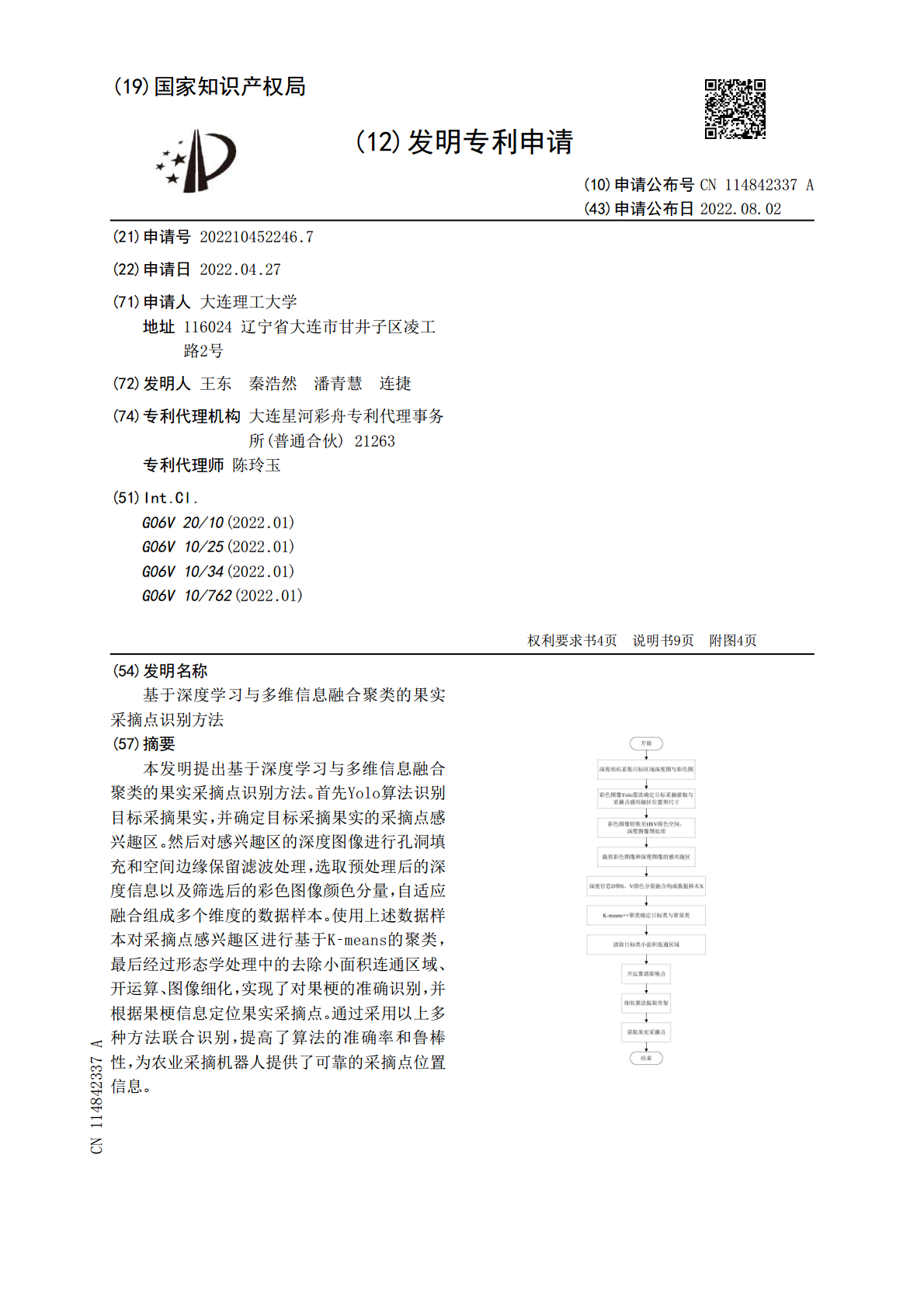
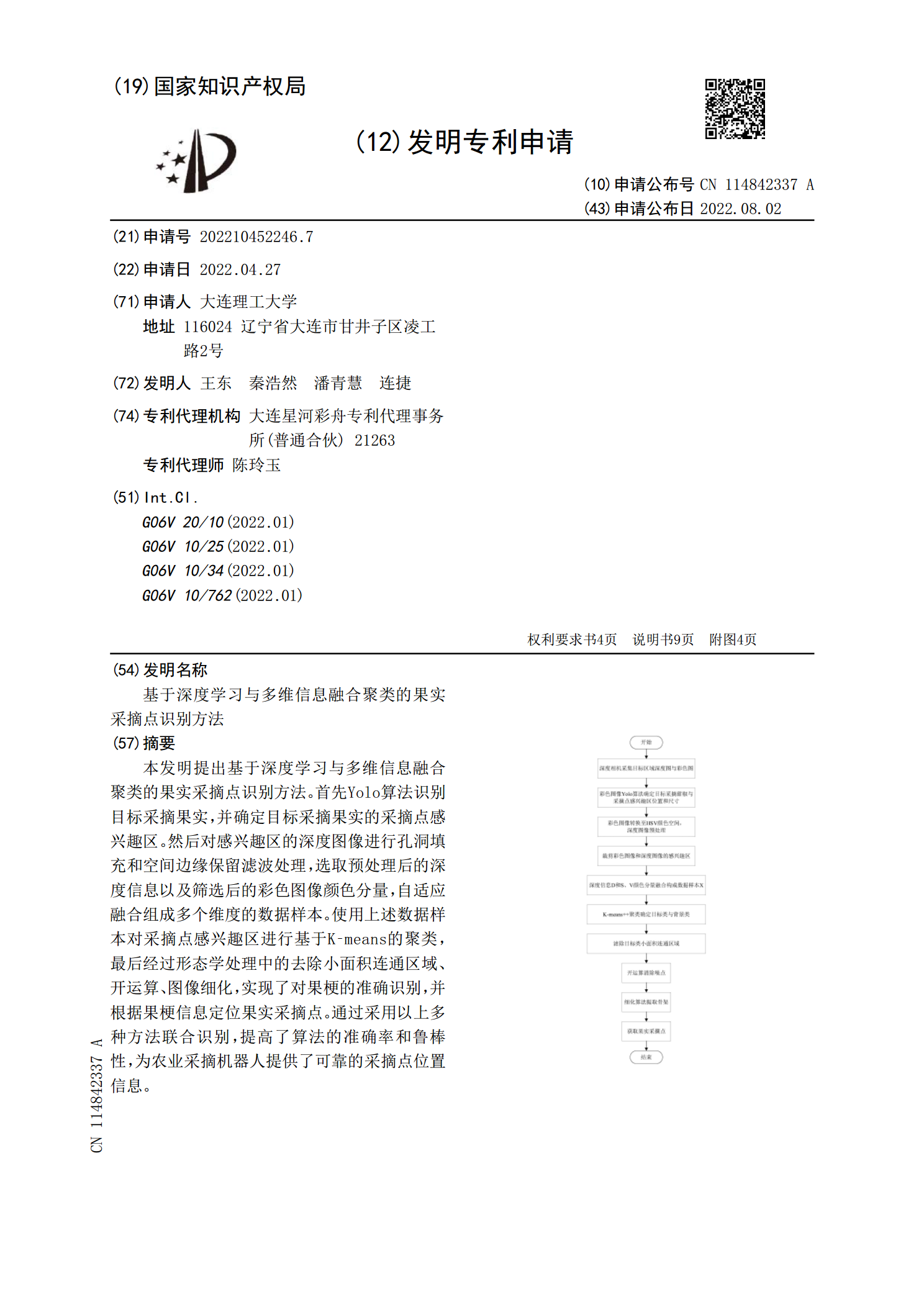
本发明提出基于深度学习与多维信息融合聚类的果实采摘点识别方法。首先Yolo算法识别目标采摘果实,并确定目标采摘果实的采摘点感兴趣区。然后对感兴趣区的深度图像进行孔洞填充和空间边缘保留滤波处理,选取预处理后的深度信息以及筛选后的彩色图像颜色分量,自适应融合组成多个维度的数据样本。使用上述数据样本对采摘点感兴趣区进行基于K‑means的聚类,最后经过形态学处理中的去除小面积连通区域、开运算、图像细化,实现了对果梗的准确识别,并根据果梗信息定位果实采摘点。通过采用以上多种方法联合识别,提高了算法的准确率和鲁棒性
基于Copula理论的多维异构信息融合识别方法.pdf
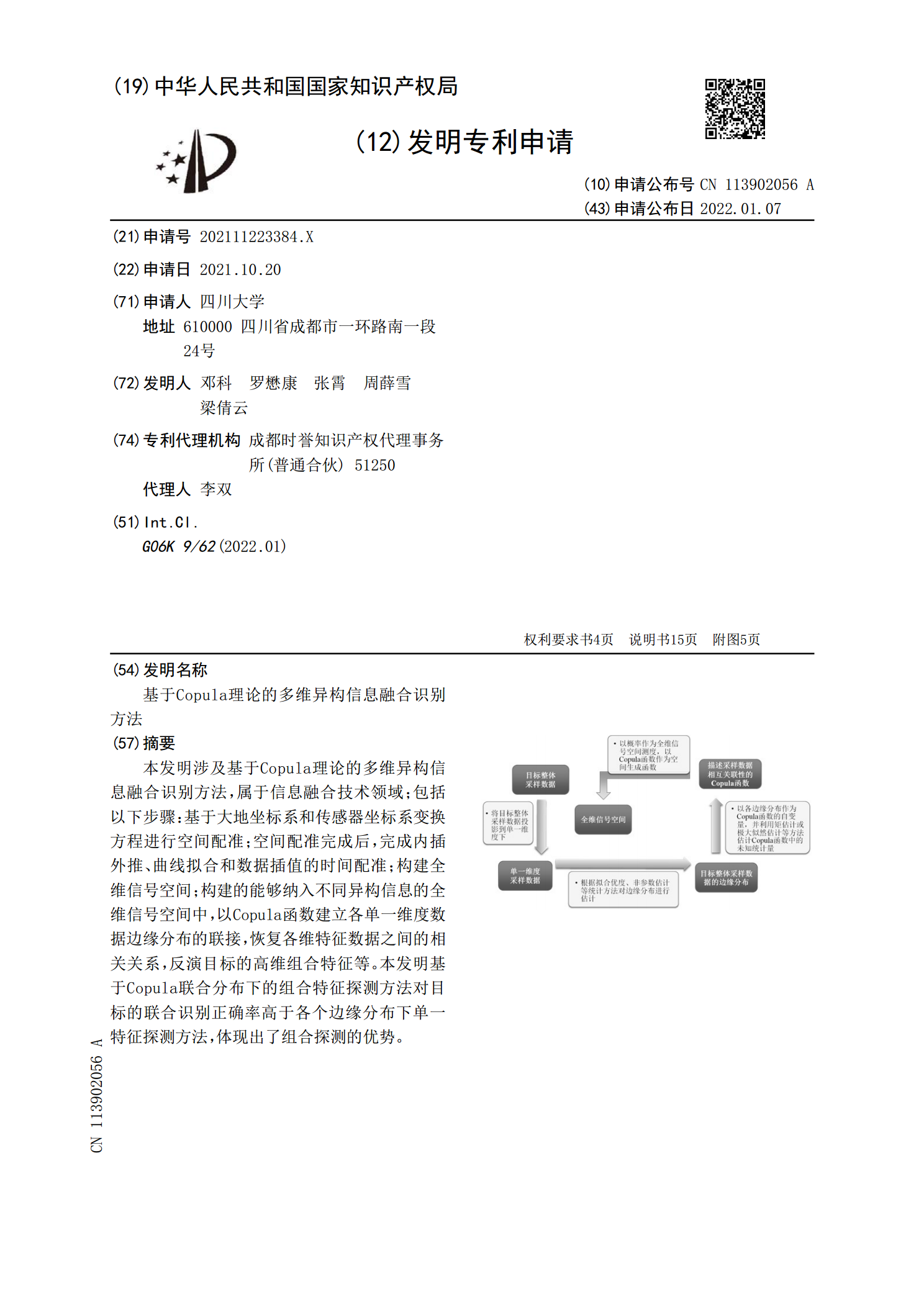
本发明涉及基于Copula理论的多维异构信息融合识别方法,属于信息融合技术领域;包括以下步骤:基于大地坐标系和传感器坐标系变换方程进行空间配准;空间配准完成后,完成内插外推、曲线拟合和数据插值的时间配准;构建全维信号空间;构建的能够纳入不同异构信息的全维信号空间中,以Copula函数建立各单一维度数据边缘分布的联接,恢复各维特征数据之间的相关关系,反演目标的高维组合特征等。本发明基于Copula联合分布下的组合特征探测方法对目标的联合识别正确率高于各个边缘分布下单一特征探测方法,体现出了组合探测的优势。

基于张量分解的多维信息融合兴趣点推荐算法.docx
基于张量分解的多维信息融合兴趣点推荐算法基于张量分解的多维信息融合兴趣点推荐算法摘要:随着互联网的快速发展,人们面临着如何从海量的信息中获取感兴趣的内容的挑战。为了解决这个问题,推荐系统逐渐成为解决信息过载问题的有效工具之一。本文提出了一种基于张量分解的多维信息融合兴趣点推荐算法。该算法将用户、兴趣点和时间维度进行了融合,利用张量分解技术对用户兴趣进行建模,从而实现了精确的兴趣点推荐。关键词:推荐系统、张量分解、兴趣点推荐引言随着移动互联网的快速发展,人们在日常生活中产生的数据量越来越大。这些数据包括用户

融合多源图像信息的果实识别方法.docx
融合多源图像信息的果实识别方法标题:基于融合多源图像信息的果实识别方法摘要:果实识别在农业领域具有广泛的应用和重要意义。由于果实的形状、颜色、纹理等特征多变且相似度较高,传统的果实识别方法存在一定的挑战。本论文提出了一种基于融合多源图像信息的果实识别方法。该方法利用多种特征提取方法,并将它们融合起来以实现更准确、鲁棒度更高的果实识别。1.引言果实识别在农业生产和果实贸易中起到至关重要的作用。传统的果实识别方法通常仅仅依靠图像的颜色特征进行识别,但这种方法容易受到照明条件和果实成熟度的影响,导致识别准确率较

融合多维信息的岩石薄片图像深度学习分类方法.docx
融合多维信息的岩石薄片图像深度学习分类方法摘要:岩石薄片图像分类在地质研究和资源勘探中具有重要意义。然而,岩石薄片图像的特征信息相对复杂,且不同特征之间存在耦合关系,传统的分类方法往往无法充分利用这些特征。因此,本文提出了一种融合多维信息的岩石薄片图像深度学习分类方法。该方法将卷积神经网络(CNN)与递归神经网络(RNN)相结合,同时考虑局部和全局的特征信息,以提高分类准确性。1.引言岩石薄片图像是地质研究和资源勘探中常用的一种数据来源。通过对岩石薄片图像进行分类,可以帮助地质学家和地质工程师更好地理解岩