
一种田间路径信息采集用的智能机器人及其采集方法.pdf

新槐****公主


1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种田间路径信息采集用的智能机器人及其采集方法.pdf
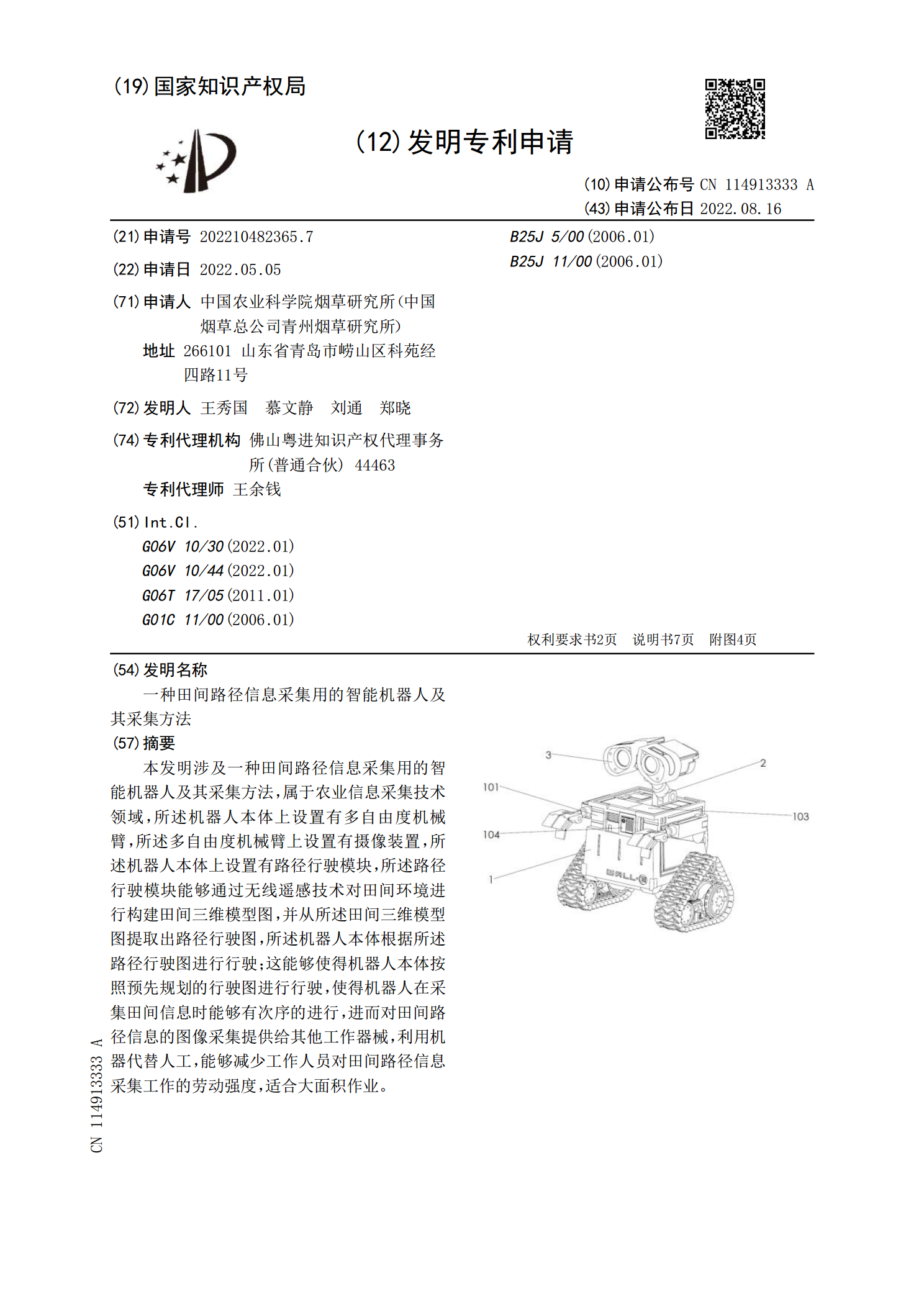
本发明涉及一种田间路径信息采集用的智能机器人及其采集方法,属于农业信息采集技术领域,所述机器人本体上设置有多自由度机械臂,所述多自由度机械臂上设置有摄像装置,所述机器人本体上设置有路径行驶模块,所述路径行驶模块能够通过无线遥感技术对田间环境进行构建田间三维模型图,并从所述田间三维模型图提取出路径行驶图,所述机器人本体根据所述路径行驶图进行行驶;这能够使得机器人本体按照预先规划的行驶图进行行驶,使得机器人在采集田间信息时能够有次序的进行,进而对田间路径信息的图像采集提供给其他工作器械,利用机器代替人工,能够
一种智能化种植管理用多信息采集装置及其采集方法.pdf
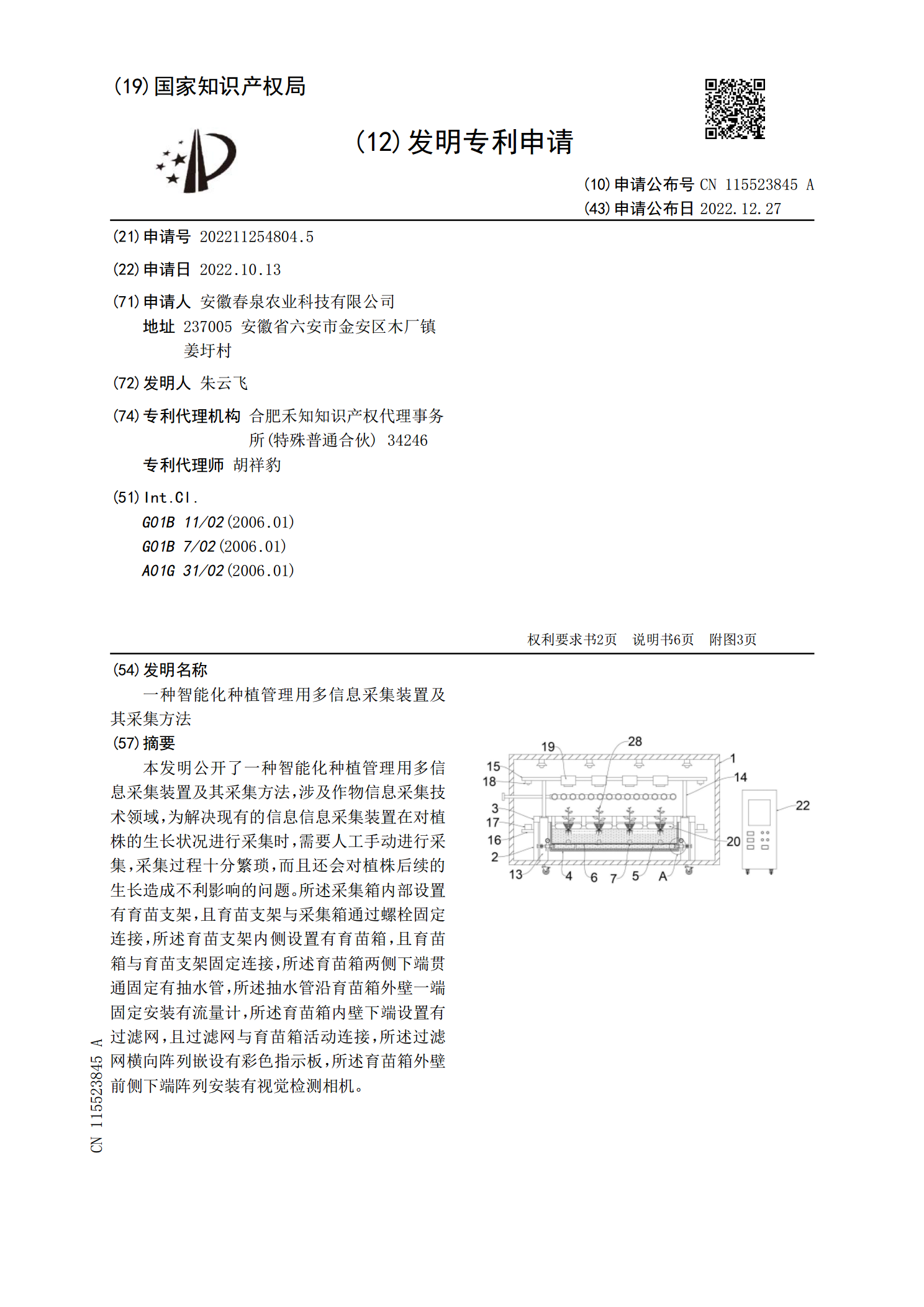
本发明公开了一种智能化种植管理用多信息采集装置及其采集方法,涉及作物信息采集技术领域,为解决现有的信息信息采集装置在对植株的生长状况进行采集时,需要人工手动进行采集,采集过程十分繁琐,而且还会对植株后续的生长造成不利影响的问题。所述采集箱内部设置有育苗支架,且育苗支架与采集箱通过螺栓固定连接,所述育苗支架内侧设置有育苗箱,且育苗箱与育苗支架固定连接,所述育苗箱两侧下端贯通固定有抽水管,所述抽水管沿育苗箱外壁一端固定安装有流量计,所述育苗箱内壁下端设置有过滤网,且过滤网与育苗箱活动连接,所述过滤网横向阵列嵌

一种沃柑田间农事信息采集方法.pdf
本发明公开一种沃柑田间农事信息采集方法,包括以下步骤:通过航线规划软件,制定无人机航拍种植基地的路线计划,利用无人机航拍数据采集系统拍摄正射影像图,并合成基地全园的正射影像图;通过果园数字地图数据形成系统对正射影像图进行处理,生成基地园区地图,形成地图上的果树点位,并最终形成果园数字地图;通过土壤墒情数据采集系统采集土壤墒情数据,通过气象站数据采集系统采集系统采集气象数据,将数据上传到云平台;云平台将数据转发至物联网系统进行处理;物联网系统将处理后的土壤墒情数据、气象数据形成报表呈现到移动设备。通过本发明

一种自走式叶绿素荧光图像采集机器人及其采集方法.pdf
本发明涉及一种自走式叶绿素荧光图像采集机器人及其采集方法,属于植物病害自动检测技术领域。其中,采集机器人包括驱动系统及搭载在该驱动系统上的便携式叶绿素荧光成像系统、电源系统、导航系统与控制系统;驱动系统包括车体、安装在车体上受控制系统控制的动力装置及安装在车体两侧受动力装置驱动的车轮;便携式叶绿素荧光成像系统通过支架悬挂于车体的一侧;电源系统与动力装置、控制系统、便携式叶绿素荧光成像系统及导航系统电连接;控制系统与导航系统及便携式叶绿素荧光成像系统通讯连接。采用该机器人可对种植区域内被测植株的叶绿素荧光图
一种信号采集设备及其采集方法.pdf
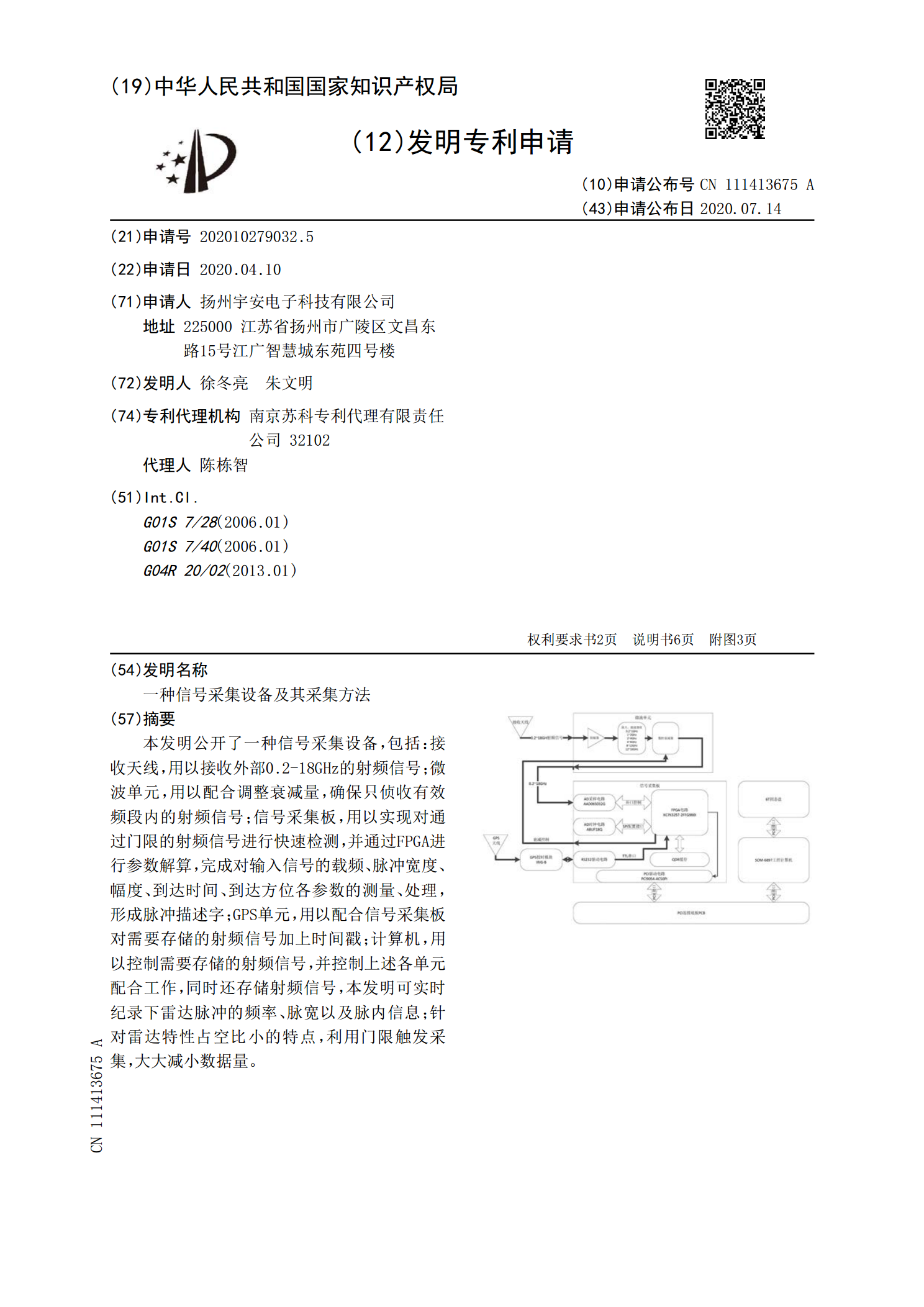
本发明公开了一种信号采集设备,包括:接收天线,用以接收外部0.2‑18GHz的射频信号;微波单元,用以配合调整衰减量,确保只侦收有效频段内的射频信号;信号采集板,用以实现对通过门限的射频信号进行快速检测,并通过FPGA进行参数解算,完成对输入信号的载频、脉冲宽度、幅度、到达时间、到达方位各参数的测量、处理,形成脉冲描述字;GPS单元,用以配合信号采集板对需要存储的射频信号加上时间戳;计算机,用以控制需要存储的射频信号,并控制上述各单元配合工作,同时还存储射频信号,本发明可实时纪录下雷达脉冲的频率、脉宽以及