
一种拖拉机后悬挂振动缓冲控制系统及拖拉机.pdf

闪闪****魔王

1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种拖拉机后悬挂振动缓冲控制系统及拖拉机.pdf
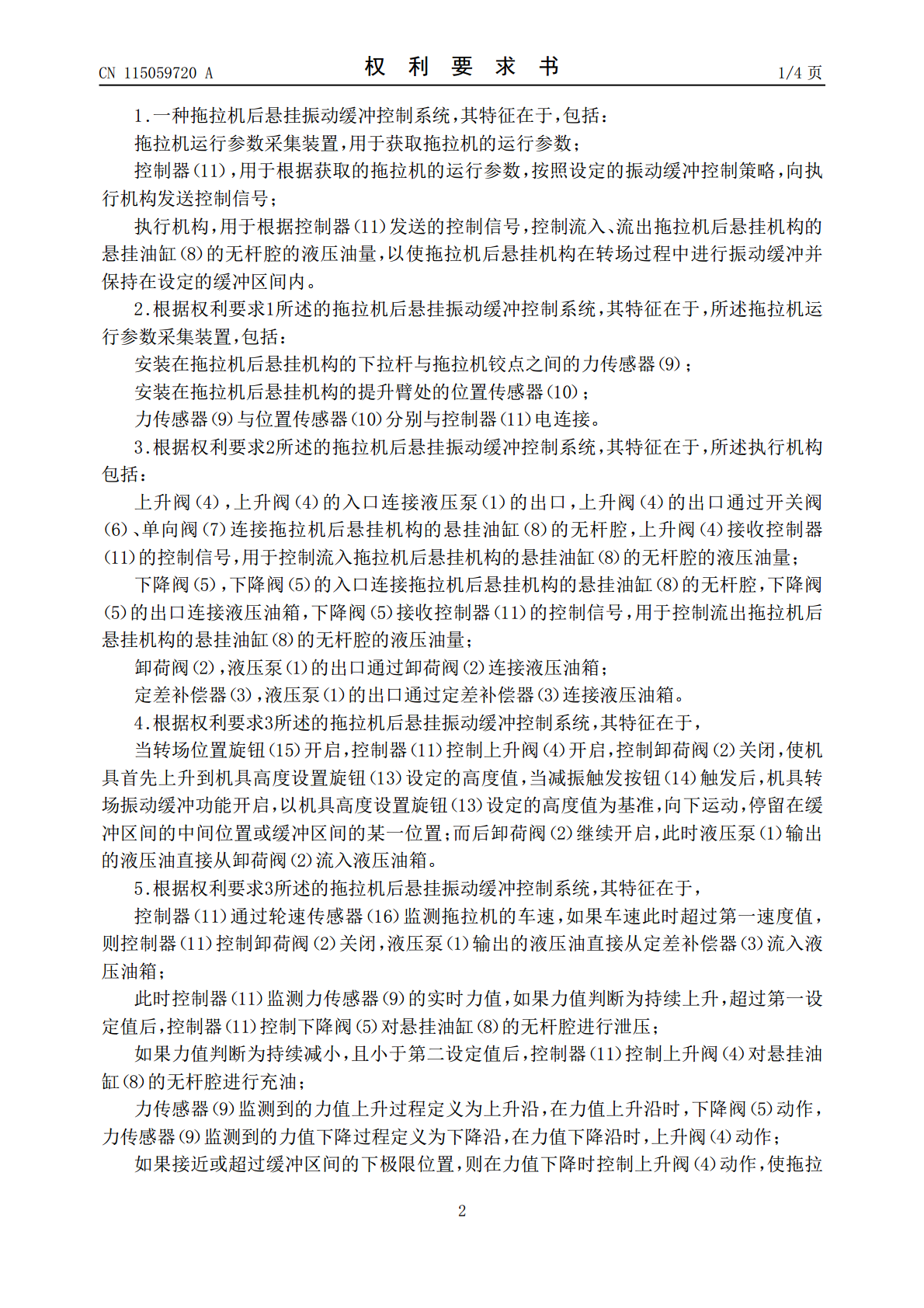
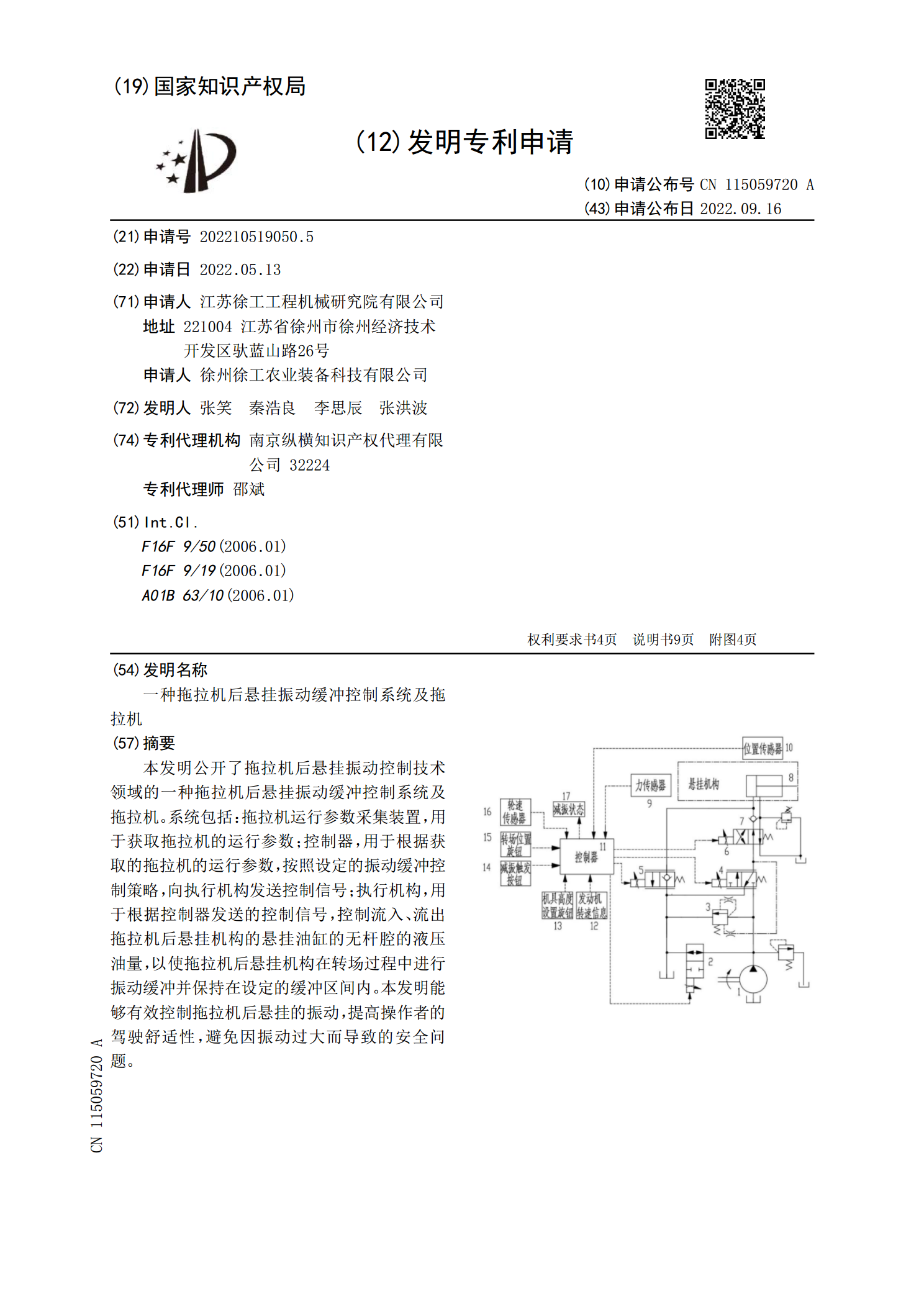
本发明公开了拖拉机后悬挂振动控制技术领域的一种拖拉机后悬挂振动缓冲控制系统及拖拉机。系统包括:拖拉机运行参数采集装置,用于获取拖拉机的运行参数;控制器,用于根据获取的拖拉机的运行参数,按照设定的振动缓冲控制策略,向执行机构发送控制信号;执行机构,用于根据控制器发送的控制信号,控制流入、流出拖拉机后悬挂机构的悬挂油缸的无杆腔的液压油量,以使拖拉机后悬挂机构在转场过程中进行振动缓冲并保持在设定的缓冲区间内。本发明能够有效控制拖拉机后悬挂的振动,提高操作者的驾驶舒适性,避免因振动过大而导致的安全问题。
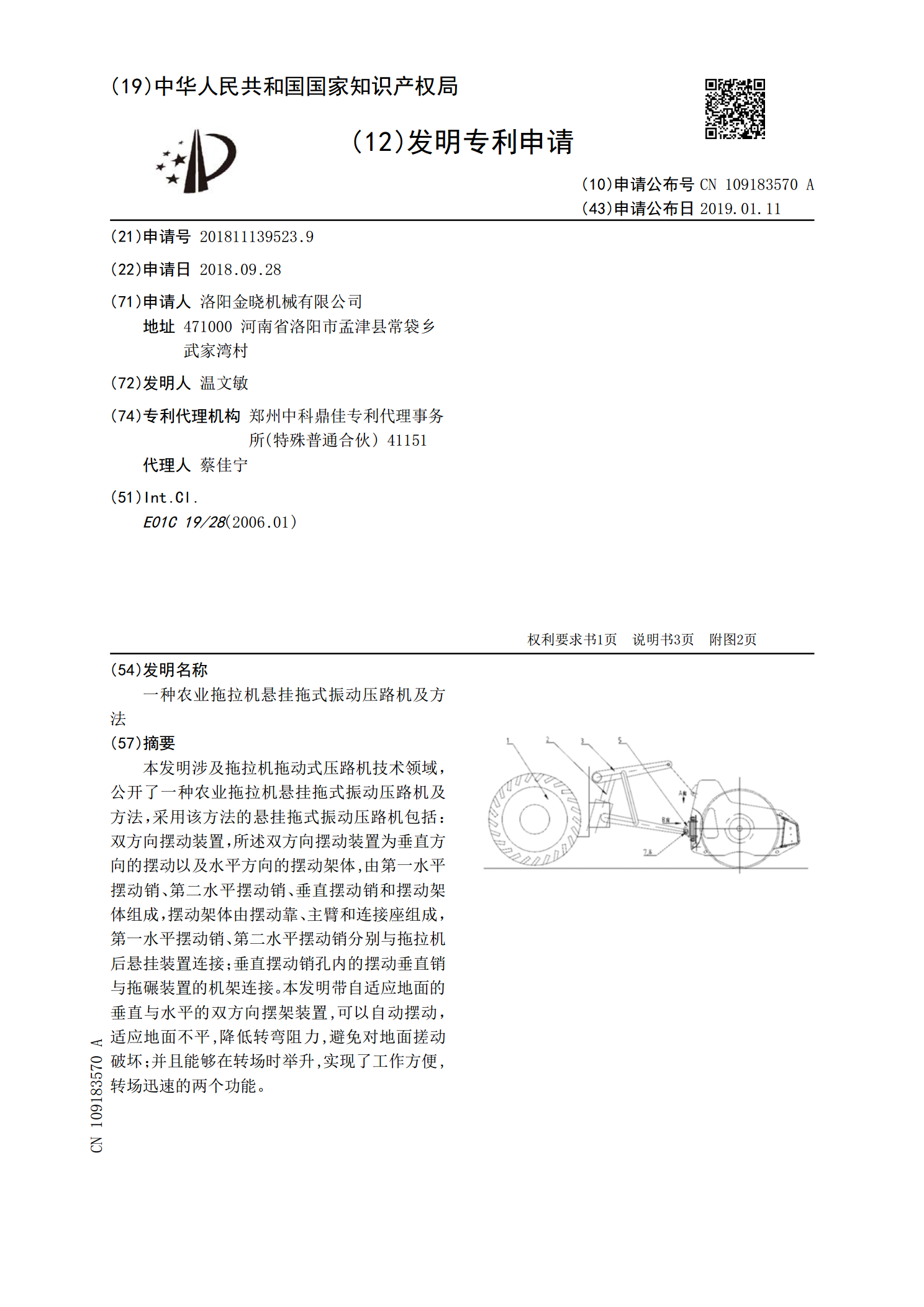
一种农业拖拉机悬挂拖式振动压路机及方法.pdf
本发明涉及拖拉机拖动式压路机技术领域,公开了一种农业拖拉机悬挂拖式振动压路机及方法,采用该方法的悬挂拖式振动压路机包括:双方向摆动装置,所述双方向摆动装置为垂直方向的摆动以及水平方向的摆动架体,由第一水平摆动销、第二水平摆动销、垂直摆动销和摆动架体组成,摆动架体由摆动靠、主臂和连接座组成,第一水平摆动销、第二水平摆动销分别与拖拉机后悬挂装置连接;垂直摆动销孔内的摆动垂直销与拖碾装置的机架连接。本发明带自适应地面的垂直与水平的双方向摆架装置,可以自动摆动,适应地面不平,降低转弯阻力,避免对地面搓动破坏;并且

拖拉机电液后悬挂技术及合理应用方式.pptx
拖拉机电液后悬挂技术的应用及合理应用方式目录添加目录项标题拖拉机电液后悬挂技术概述技术定义技术发展历程技术原理技术特点拖拉机电液后悬挂技术的应用场景农业领域应用林业领域应用牧业领域应用其他领域应用拖拉机电液后悬挂技术的合理应用方式正确选择悬挂类型合理配置悬挂系统参数正确安装悬挂系统定期维护与保养拖拉机电液后悬挂技术的应用优势与局限性应用优势局限性技术改进方向拖拉机电液后悬挂技术的未来发展前景技术发展趋势市场前景分析技术创新方向感谢观看

一种抱草夹机具的拖拉机后悬挂挂接装置.pdf
本发明公开了农用机械设备技术领域的一种抱草夹机具的拖拉机后悬挂挂接装置,包括支架,所述上支腿顶部开设有与支架相配合的限位槽,所述限位槽内滑动设有滑动杆,所述限位杆的顶部和底部均焊接有安装板,所述安装板通过螺丝固定在支架顶部,所述限位杆外壁套设有套管,所述限位杆外壁与套管连接处的顶部和底部均套设有扭力弹簧,在拖拉机行驶在颠簸路段时,套管在限位杆外壁滑动,减小拖拉机颠簸弯给联动杆带来的冲击力,而在扭力弹簧和支撑弹簧的作用下,对上下抖动的作用力进行削弱,在上下抖动的过程中,活塞板与杆件在连接壳内左右滑动,而第一
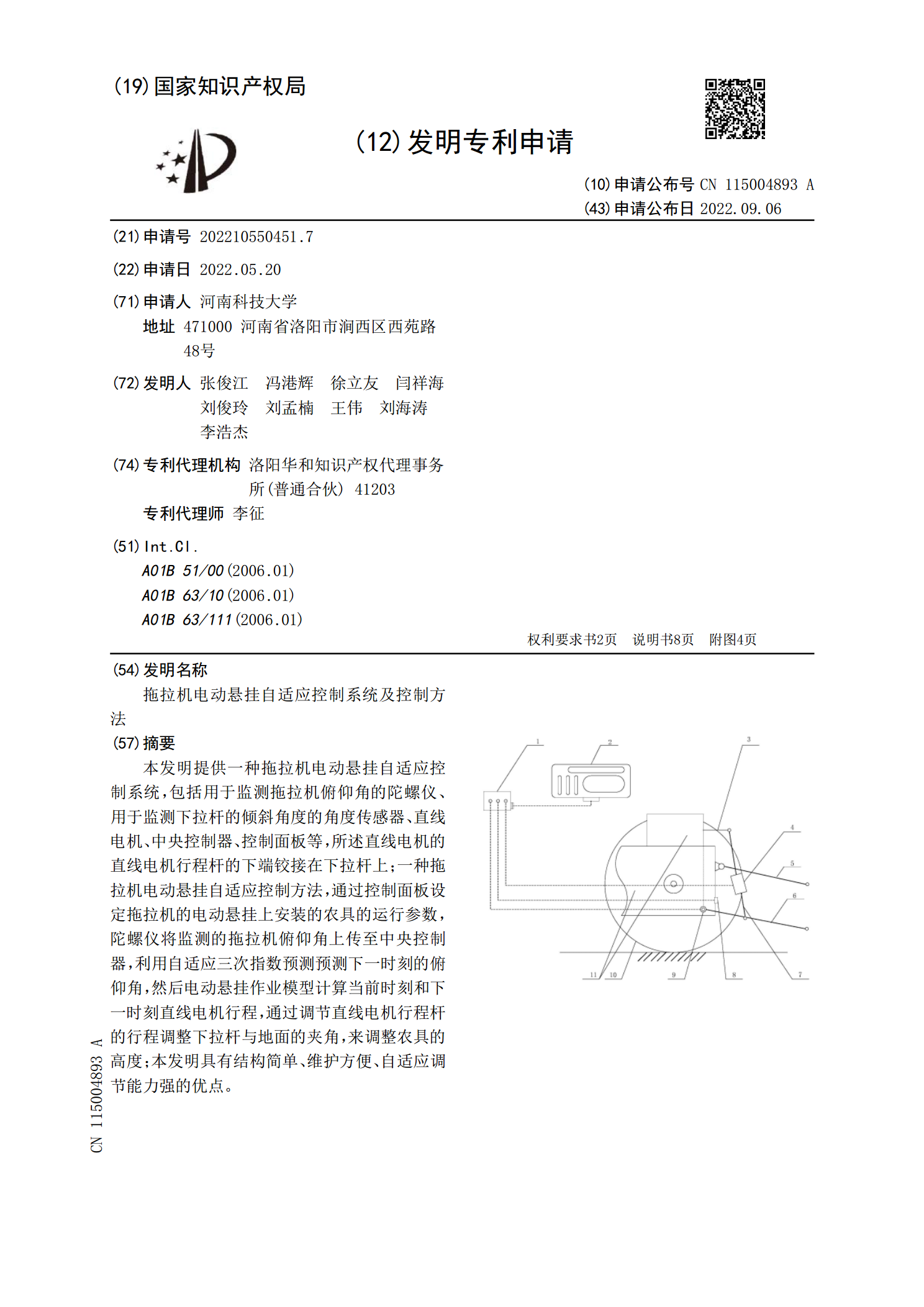
拖拉机电动悬挂自适应控制系统及控制方法.pdf
本发明提供一种拖拉机电动悬挂自适应控制系统,包括用于监测拖拉机俯仰角的陀螺仪、用于监测下拉杆的倾斜角度的角度传感器、直线电机、中央控制器、控制面板等,所述直线电机的直线电机行程杆的下端铰接在下拉杆上;一种拖拉机电动悬挂自适应控制方法,通过控制面板设定拖拉机的电动悬挂上安装的农具的运行参数,陀螺仪将监测的拖拉机俯仰角上传至中央控制器,利用自适应三次指数预测预测下一时刻的俯仰角,然后电动悬挂作业模型计算当前时刻和下一时刻直线电机行程,通过调节直线电机行程杆的行程调整下拉杆与地面的夹角,来调整农具的高度;本发明