
一种智能化农机北斗导航自动驾驶辅助系统.pdf

猫巷****永安

1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能化农机北斗导航自动驾驶辅助系统.pdf
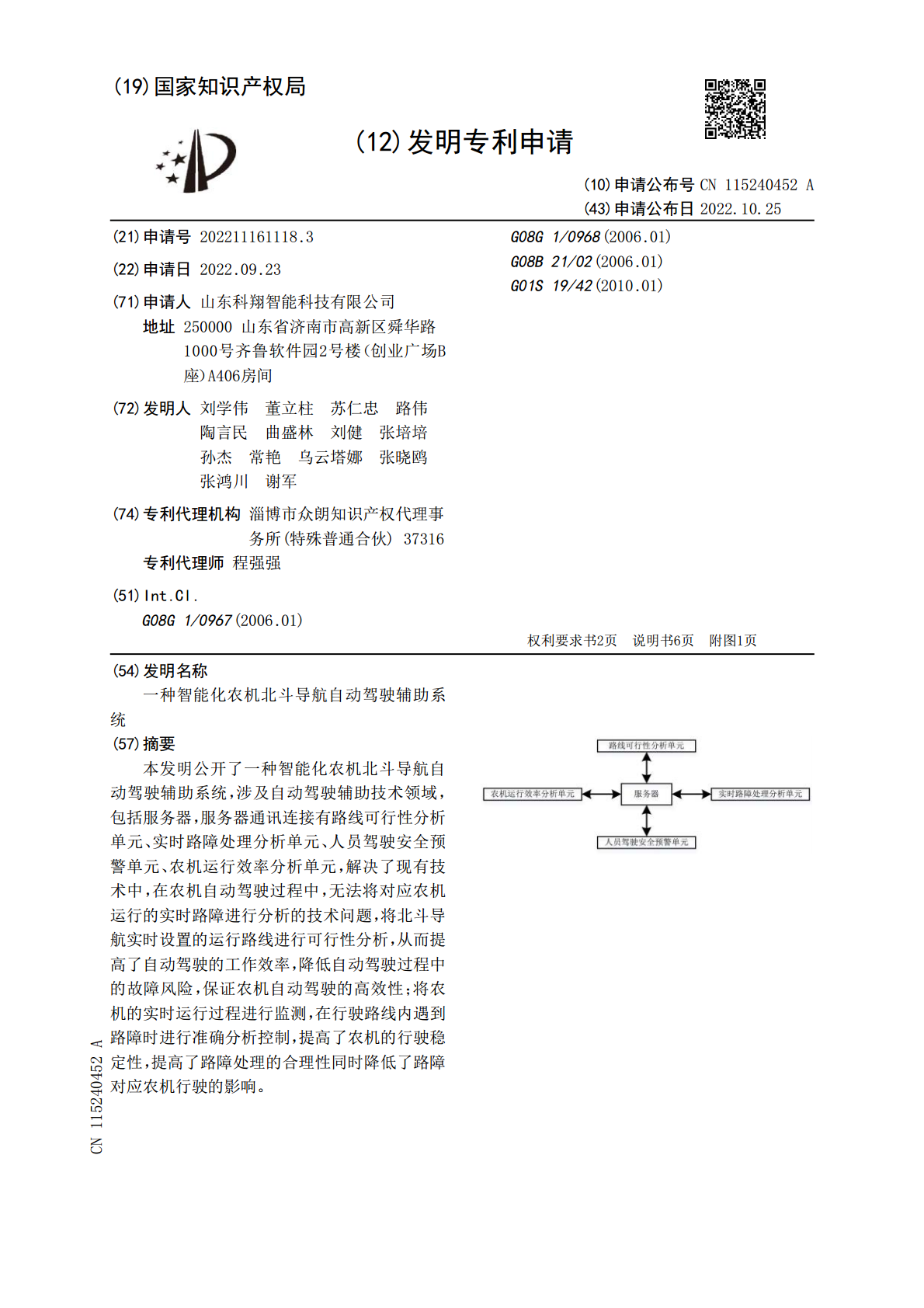
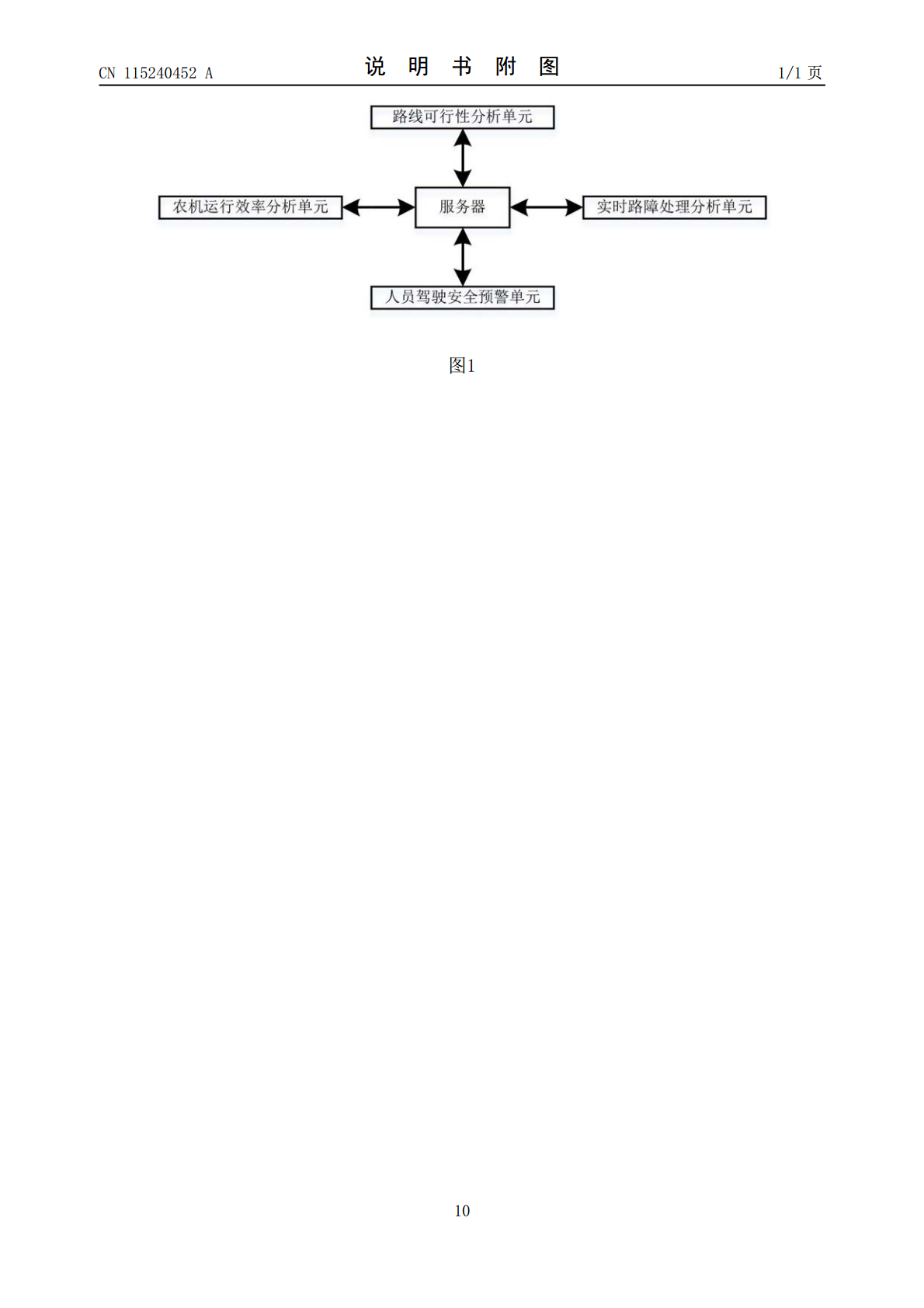
本发明公开了一种智能化农机北斗导航自动驾驶辅助系统,涉及自动驾驶辅助技术领域,包括服务器,服务器通讯连接有路线可行性分析单元、实时路障处理分析单元、人员驾驶安全预警单元、农机运行效率分析单元,解决了现有技术中,在农机自动驾驶过程中,无法将对应农机运行的实时路障进行分析的技术问题,将北斗导航实时设置的运行路线进行可行性分析,从而提高了自动驾驶的工作效率,降低自动驾驶过程中的故障风险,保证农机自动驾驶的高效性;将农机的实时运行过程进行监测,在行驶路线内遇到路障时进行准确分析控制,提高了农机的行驶稳定性,提高了
一种北斗导航农机作业控制方法及系统.pdf
本发明公开了一种北斗导航农机作业控制方法及系统,其中,一种北斗导航农机作业控制方法包括,通过无人机获取田地全景图像,并通过图像处理模块对田地全景图像进行预处理;基于预处理获得的图像,通过线路规划模块对农机作业进行线路规划,生成最短路径;通过北斗模块获取农机位置,将最短路径和农机位置输入至控制模块,控制农机作业;本发明通过设计图像处理模块对无人机采集的全景图像进行处理,为线路规划提供准确依据,同时通过加入农机工作效率和时钟,有效地提高了农机的工作效率。

基于北斗导航的农机自动驾驶系统构建与经济效益研究的任务书.docx
基于北斗导航的农机自动驾驶系统构建与经济效益研究的任务书一、任务背景随着工业化和城镇化进程的不断推进,我国农村地区的劳动力削减、农业机械技术的不断发展,农村机具市场逐渐升温,农机的机械化水平也在不断提升,人工操作和机械操作已经在某些方面达到了同等效果。在农业生产中,为了提高生产效率和劳动效率,农机自动驾驶技术成为了行业内的热点。北斗导航系统是我国自主研发的卫星导航系统,具有遍及全球、运行成本低、精度高等优点,广泛应用于汽车、海运、航空、铁路、精准农业等领域。其中,农业应用的重要领域是农机自动驾驶系统。农机

基于北斗导航的智能化农机管理方法、系统及云平台.pdf
本发明提供的基于北斗导航的智能化农机管理方法、系统及云平台,涉及智能化农业技术领域。本发明针对每一个农业机械设备,基于部署的北斗定位设备获取该农业机械设备的设备当前位置信息,并基于设备当前位置信息确定多个农业机械设备中是否存在相互之间具有关联关系的两个目标农业机械设备;针对每一个目标农业机械设备,基于该目标农业机械设备上部署的图像采集设备获取该目标农业机械设备的设备环境监控图像集合;基于每一个目标农业机械设备的设备环境监控图像集合包括的设备环境监控图像,分别生成两个目标农业机械设备对应的运动控制参数。基于
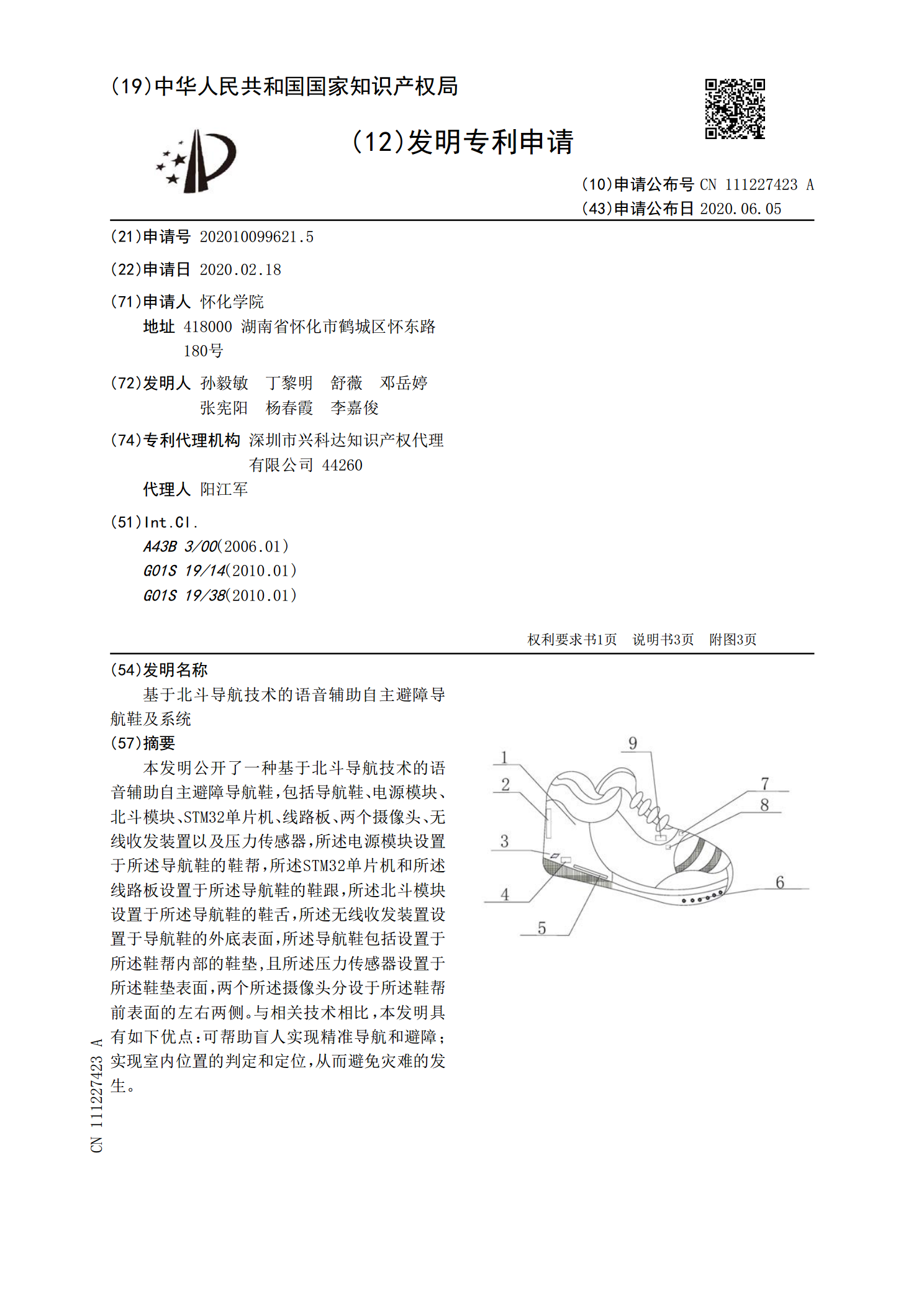
基于北斗导航技术的语音辅助自主避障导航鞋及系统.pdf
本发明公开了一种基于北斗导航技术的语音辅助自主避障导航鞋,包括导航鞋、电源模块、北斗模块、STM32单片机、线路板、两个摄像头、无线收发装置以及压力传感器,所述电源模块设置于所述导航鞋的鞋帮,所述STM32单片机和所述线路板设置于所述导航鞋的鞋跟,所述北斗模块设置于所述导航鞋的鞋舌,所述无线收发装置设置于导航鞋的外底表面,所述导航鞋包括设置于所述鞋帮内部的鞋垫,且所述压力传感器设置于所述鞋垫表面,两个所述摄像头分设于所述鞋帮前表面的左右两侧。与相关技术相比,本发明具有如下优点:可帮助盲人实现精准导航和避障