
基于机器视觉深度信息的茶蓬刀具调节方法及采茶系统.pdf

一条****然后

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于机器视觉深度信息的茶蓬刀具调节方法及采茶系统.pdf
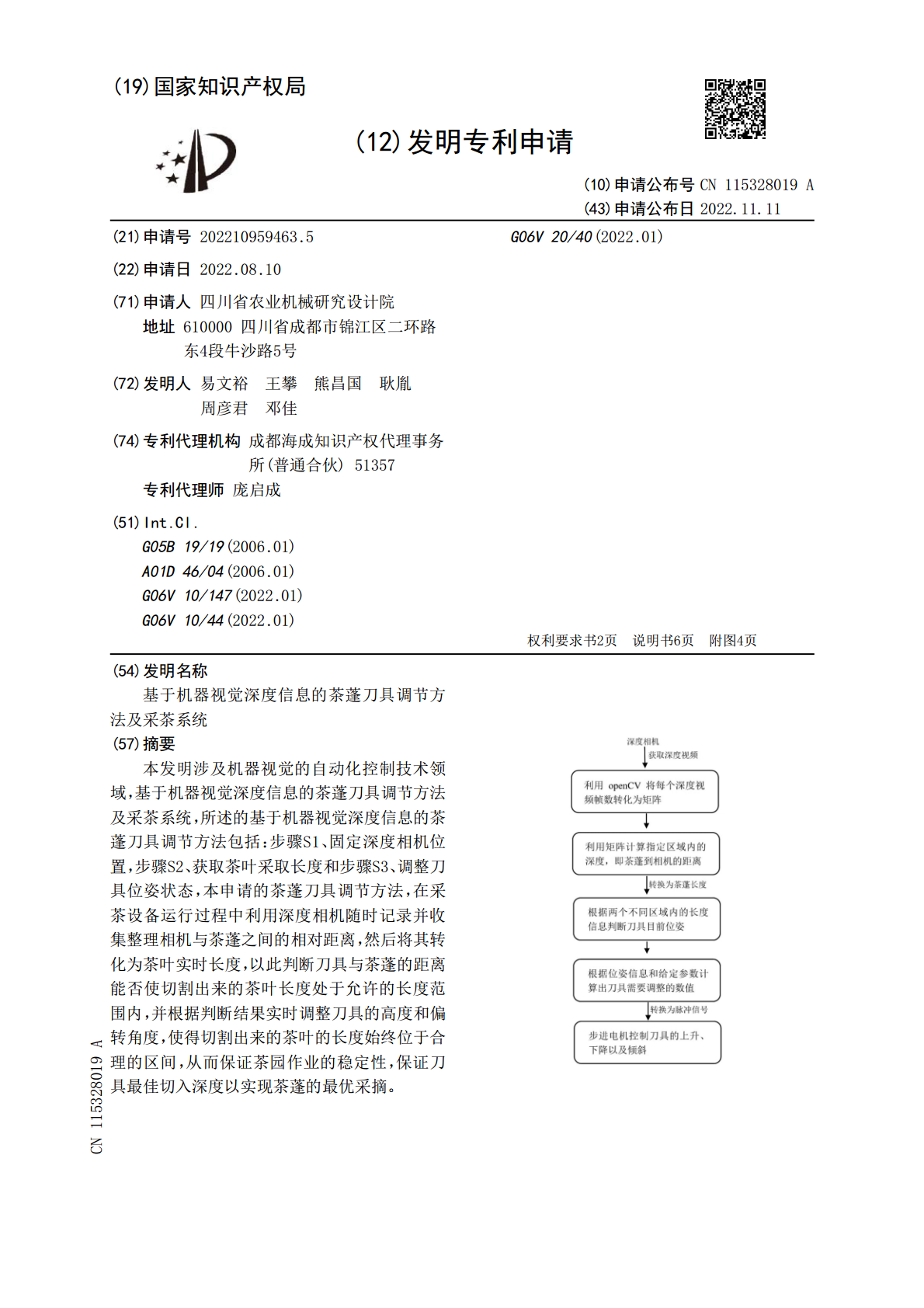
本发明涉及机器视觉的自动化控制技术领域,基于机器视觉深度信息的茶蓬刀具调节方法及采茶系统,所述的基于机器视觉深度信息的茶蓬刀具调节方法包括:步骤S1、固定深度相机位置,步骤S2、获取茶叶采取长度和步骤S3、调整刀具位姿状态,本申请的茶蓬刀具调节方法,在采茶设备运行过程中利用深度相机随时记录并收集整理相机与茶蓬之间的相对距离,然后将其转化为茶叶实时长度,以此判断刀具与茶蓬的距离能否使切割出来的茶叶长度处于允许的长度范围内,并根据判断结果实时调整刀具的高度和偏转角度,使得切割出来的茶叶的长度始终位于合理的区间
基于计算机视觉和深度学习的茶蓬深度分布检测方法.pdf
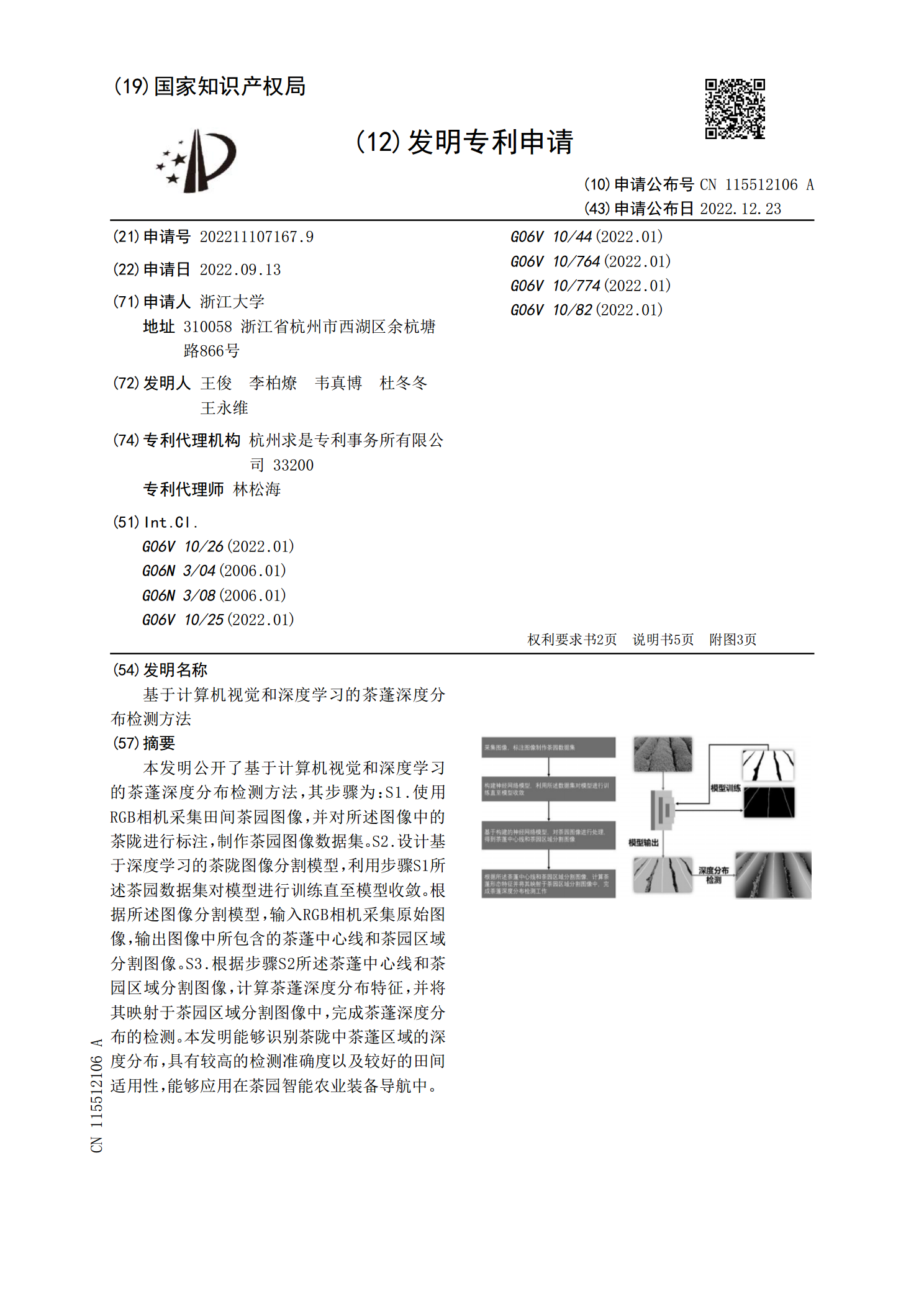
本发明公开了基于计算机视觉和深度学习的茶蓬深度分布检测方法,其步骤为:S1.使用RGB相机采集田间茶园图像,并对所述图像中的茶陇进行标注,制作茶园图像数据集。S2.设计基于深度学习的茶陇图像分割模型,利用步骤S1所述茶园数据集对模型进行训练直至模型收敛。根据所述图像分割模型,输入RGB相机采集原始图像,输出图像中所包含的茶蓬中心线和茶园区域分割图像。S3.根据步骤S2所述茶蓬中心线和茶园区域分割图像,计算茶蓬深度分布特征,并将其映射于茶园区域分割图像中,完成茶蓬深度分布的检测。本发明能够识别茶陇中茶蓬区域

基于机器视觉的合金刀具检测系统设计与研究.docx
基于机器视觉的合金刀具检测系统设计与研究随着科技的不断进步和人们对生产效率的不断追求,自动化生产已经成为很多企业发展的必经之路,而机器视觉技术作为自动化生产的重要手段,得到了广泛的应用。本文以合金刀具检测为例,介绍了一个基于机器视觉的合金刀具检测系统的设计与研究。一、系统设计1.刀具样本采集刀具样本采集是建立刀具检测系统的第一步,通过采集大量的刀具图像数据,能够建立一个完整的刀具图像库,为后续的图像处理和识别提供基础。在采集样本时需要做到多角度、多方向、多光源的综合采集,以适应不同的工作环境和光照条件。2
一种基于机器视觉的薄膜调节方法.pdf
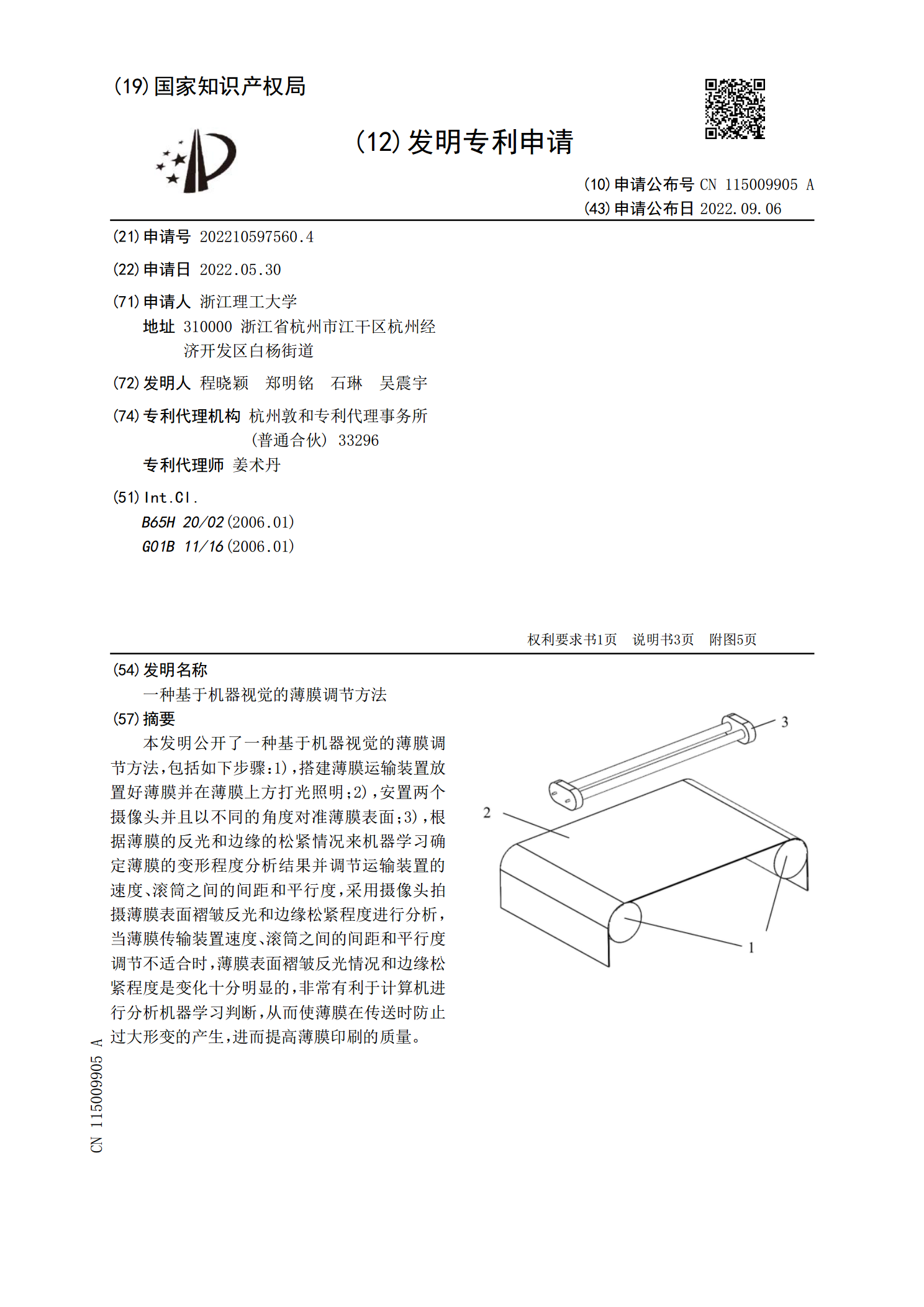
本发明公开了一种基于机器视觉的薄膜调节方法,包括如下步骤:1),搭建薄膜运输装置放置好薄膜并在薄膜上方打光照明;2),安置两个摄像头并且以不同的角度对准薄膜表面;3),根据薄膜的反光和边缘的松紧情况来机器学习确定薄膜的变形程度分析结果并调节运输装置的速度、滚筒之间的间距和平行度,采用摄像头拍摄薄膜表面褶皱反光和边缘松紧程度进行分析,当薄膜传输装置速度、滚筒之间的间距和平行度调节不适合时,薄膜表面褶皱反光情况和边缘松紧程度是变化十分明显的,非常有利于计算机进行分析机器学习判断,从而使薄膜在传送时防止过大形变
一种基于机器视觉的薄膜调节方法.pdf
本发明公开了一种基于机器视觉的薄膜调节方法,包括如下步骤:1),搭建薄膜运输装置放置好薄膜并在薄膜上方打光照明;2),安置两个摄像头并且以不同的角度对准薄膜表面;3),根据薄膜的反光和边缘的松紧情况来机器学习确定薄膜的变形程度分析结果并调节运输装置的速度、滚筒之间的间距和平行度,采用摄像头拍摄薄膜表面褶皱反光和边缘松紧程度进行分析,当薄膜传输装置速度、滚筒之间的间距和平行度调节不适合时,薄膜表面褶皱反光情况和边缘松紧程度是变化十分明显的,非常有利于计算机进行分析机器学习判断,从而使薄膜在传送时防止过大形变