
农机参数测量方法、装置、设备及存储介质.pdf

是雁****找我


1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
农机参数测量方法、装置、设备及存储介质.pdf
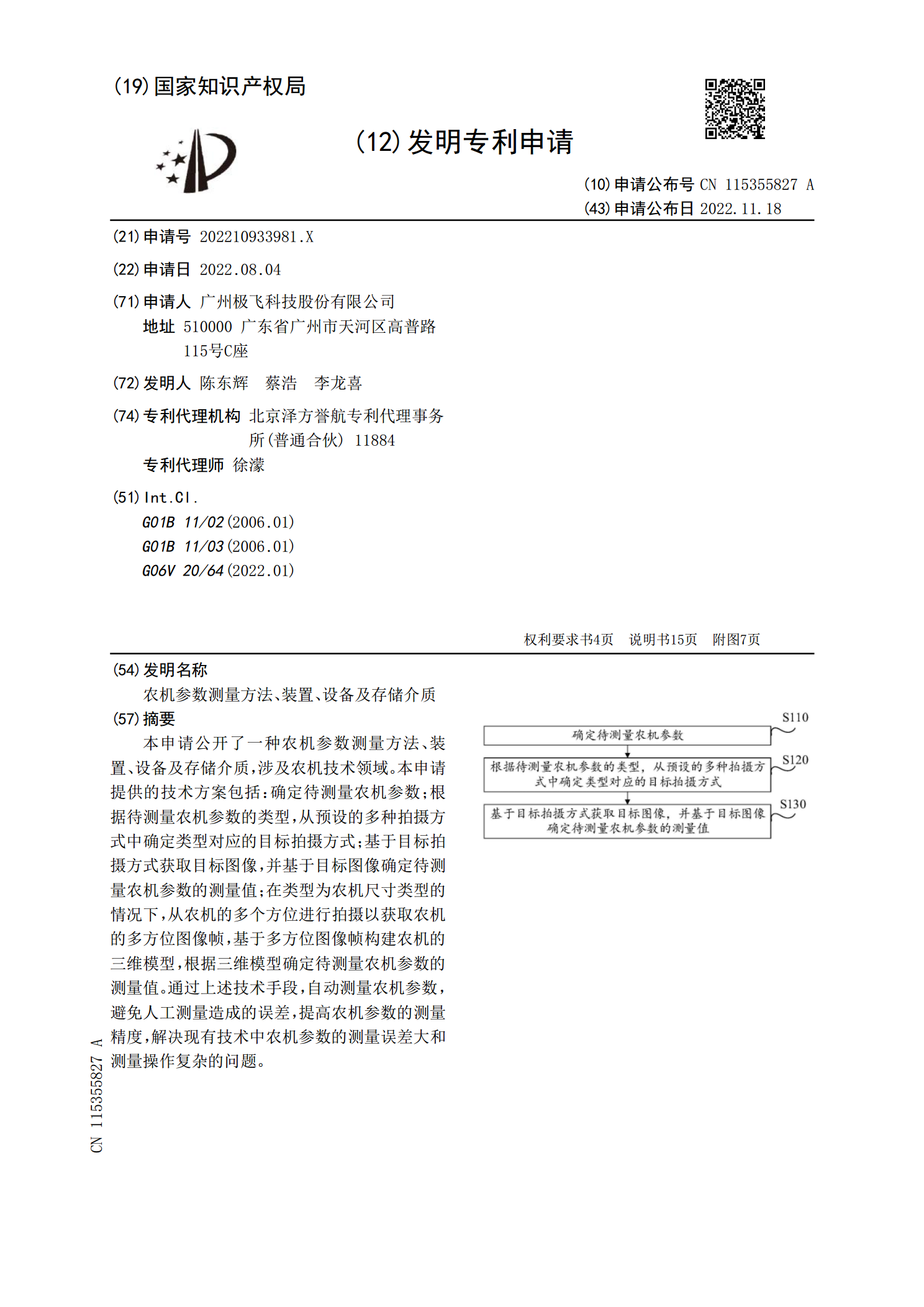
本申请公开了一种农机参数测量方法、装置、设备及存储介质,涉及农机技术领域。本申请提供的技术方案包括:确定待测量农机参数;根据待测量农机参数的类型,从预设的多种拍摄方式中确定类型对应的目标拍摄方式;基于目标拍摄方式获取目标图像,并基于目标图像确定待测量农机参数的测量值;在类型为农机尺寸类型的情况下,从农机的多个方位进行拍摄以获取农机的多方位图像帧,基于多方位图像帧构建农机的三维模型,根据三维模型确定待测量农机参数的测量值。通过上述技术手段,自动测量农机参数,避免人工测量造成的误差,提高农机参数的测量精度,解
蠕动参数的测量方法、测量设备及存储介质.pdf
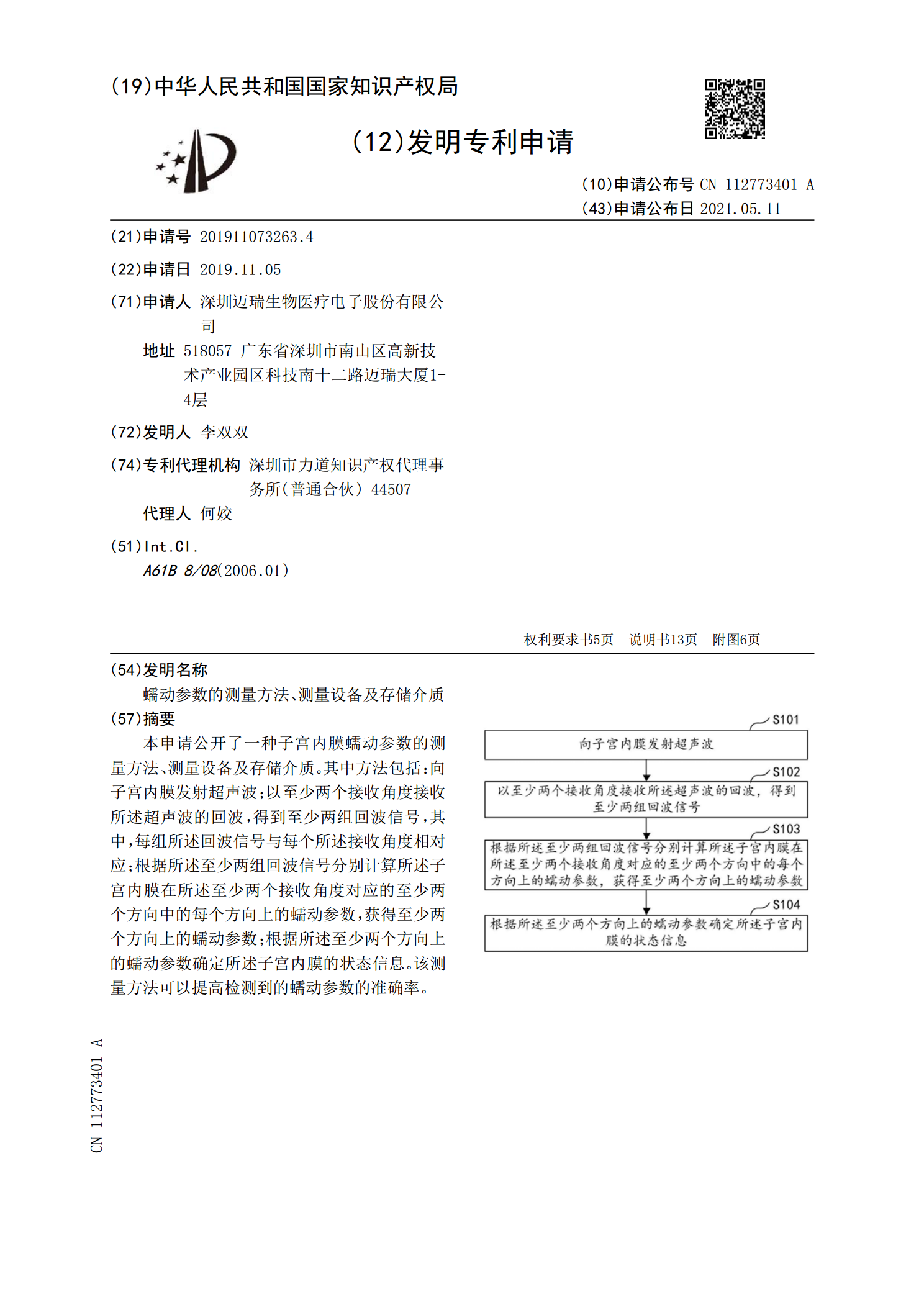
本申请公开了一种子宫内膜蠕动参数的测量方法、测量设备及存储介质。其中方法包括:向子宫内膜发射超声波;以至少两个接收角度接收所述超声波的回波,得到至少两组回波信号,其中,每组所述回波信号与每个所述接收角度相对应;根据所述至少两组回波信号分别计算所述子宫内膜在所述至少两个接收角度对应的至少两个方向中的每个方向上的蠕动参数,获得至少两个方向上的蠕动参数;根据所述至少两个方向上的蠕动参数确定所述子宫内膜的状态信息。该测量方法可以提高检测到的蠕动参数的准确率。
色差测量方法、装置、设备及存储介质.pdf
本发明属于车辆技术领域,公开了一种色差测量方法、装置、设备及存储介质。该方法包括:获取色差测试数据;根据预设色差修正系数对所述色差测试数据进行修正,得到修正色差数据;根据所述修正色差数据确定目标修正色差。通过上述方式,通过预设色车修正系数对色差测试数据进行修正,得到修正后的修正色差数据,根据修正色差数据确定目标修正色差,从而提高了色差测量的准确率,同时节省了人力资源。

测量方法、装置、设备及可读存储介质.pdf
本申请实施例提供一种定位参考信号测量的方法、装置、设备及可读存储介质,该方法包括:终端发送第一信息,所述第一信息用于请求和/或终止第一配置;所述第一配置包括以下一项或多项:激活DLBWP改变;周期、半持续或非周期MG配置;其中,所述第一配置由DCI或者MAC?CE激活或者去激活。
坍落度的测量方法、装置、设备及存储介质.pdf
本申请提供一种坍落度的测量方法、装置、设备及存储介质。该坍落度的测量方法包括:获取多帧检测图像;提取各帧所述检测图像中混凝土块所在的第一目标区域;根据各个所述第一目标区域的尺寸信息,确定所述混凝土块的各个扩展度;根据各个所述扩展度以及各个所述扩展度对应的检测图像的拍摄时间,确定所述混凝土块的坍落度,实现了基于图像分析的、不借助额外测量工具的坍落度自动测量方式,提高了坍落度测量的效率和准确度。