
一种基于双注意力机制的牛只行为识别方法.pdf

努力****爱敏

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于双注意力机制的牛只行为识别方法.pdf
本发明公开了一种基于双注意力机制的牛只行为识别方法,包括:采集牛只的视频数据,在轻量级网络模型MobileNetV3的网络层并列设置注意力机制模块SE和CBAM,其中在注意力机制模块SE中增加全连接层,将注意力机制模块SE和CBAM的激活函数分别更改为softsign和hardsigmoid,采用联合损失函数优化轻量级网络模型MobileNetV3,构建改进的轻量级网络模型,在网络模型中输入牛只的视频数据,识别牛只多种行为,采用余弦距离和欧式距离的组合算法区分牛只多种行为中的站立或行走行为。该方法可以准确

一种基于注意力机制的视频行为识别方法.pdf
本发明公开了一种基于注意力机制的视频行为识别方法,所述方法包括以下步骤:通过卷积神经网络从视频样本中提取所需的帧级特征表达;对视频张量进行空域全局平均处理,融合特征中的空域信息,以获取不同帧的通道级特征表达作为待优化特征,并将其聚合为视频级特征表达,加强注意力得分提取过程中的帧间信息交互;利用本发明提出的通道级时域注意力提取方法,为视频帧级表达中每一个通道都计算出描述其重要程度的分值,同时对视频中不同帧特征和帧级特征中不同通道进行重要程度的区分,突出不同通道上的关键信息;使用加权求和的方式,优化视频级特征
一种基于SimAM注意力机制的行为识别方法.pdf
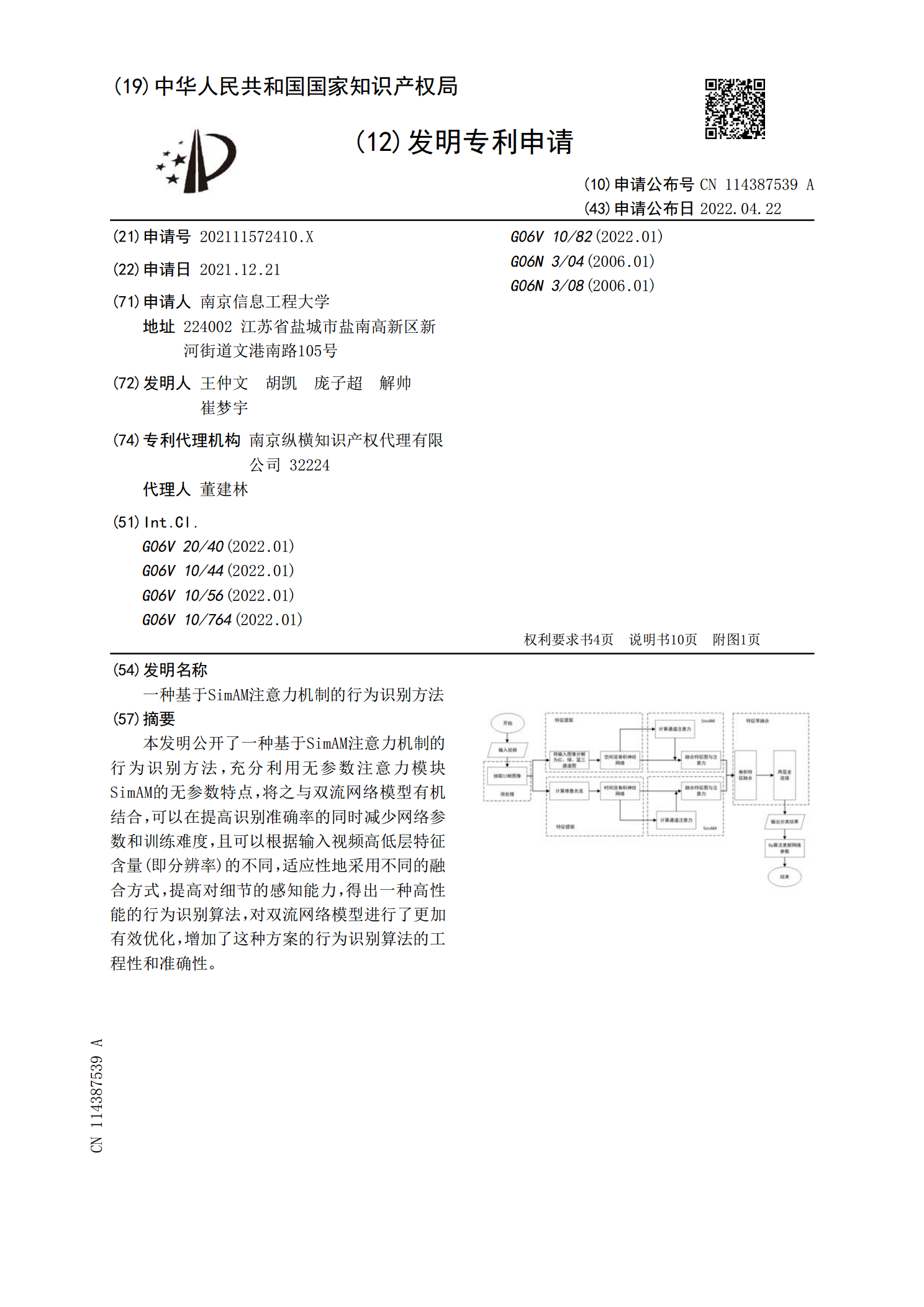
本发明公开了一种基于SimAM注意力机制的行为识别方法,充分利用无参数注意力模块SimAM的无参数特点,将之与双流网络模型有机结合,可以在提高识别准确率的同时减少网络参数和训练难度,且可以根据输入视频高低层特征含量(即分辨率)的不同,适应性地采用不同的融合方式,提高对细节的感知能力,得出一种高性能的行为识别算法,对双流网络模型进行了更加有效优化,增加了这种方案的行为识别算法的工程性和准确性。

一种基于注意力机制的LSTM人体行为识别方法.pdf
本发明具体涉及一种基于注意力机制的LSTM人体行为识别方法。将人体关节点坐标信息作为输入数据,将人体关节点根据人体结构分为5组,并将其坐标信息送入5个LSTM‑Attention模块进行特征提取,将提取到的新特征进行3次局部融合,并将其送入相应的LSTM‑Attention模块进行特征提取以获得整个人体特征,将整个人体特征送入全连接层以及softmax层输出人体行为识别结果;本发明在LSTM中引入注意力机制,使得LSTM能够较好的保留和处理数据中的时序信息,特征向量传入Attention层中能够自适应地感

一种基于融合注意力机制的人体行为识别方法.pdf
本发明涉及一种基于融合注意力机制的人体行为识别方法,利用卷积网络模块学习多源异构传感器信号内部的空间特征,融合各传感器特征向量,通过传感器通道注意力模块学习传感器数据间相关性,卷积网络模块的输出输入到循环神经网络模块中学得时序间关系,采用自注意力机制捕获输入序列中关键部分,决定每部分的输入权重,使用注意力门过滤噪声部分,保留注意力分数较高的部分,最终形成整个时间序列的特征向量,得到行为分类结果,通过引入注意力机制以分离不同人类行为下的传感器内关系、传感器间关系以及行为时序关系,提高了对于人类行动分类准确率