
10论文正文 管道履带式机器人.doc

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共49页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

10论文正文 管道履带式机器人.docx
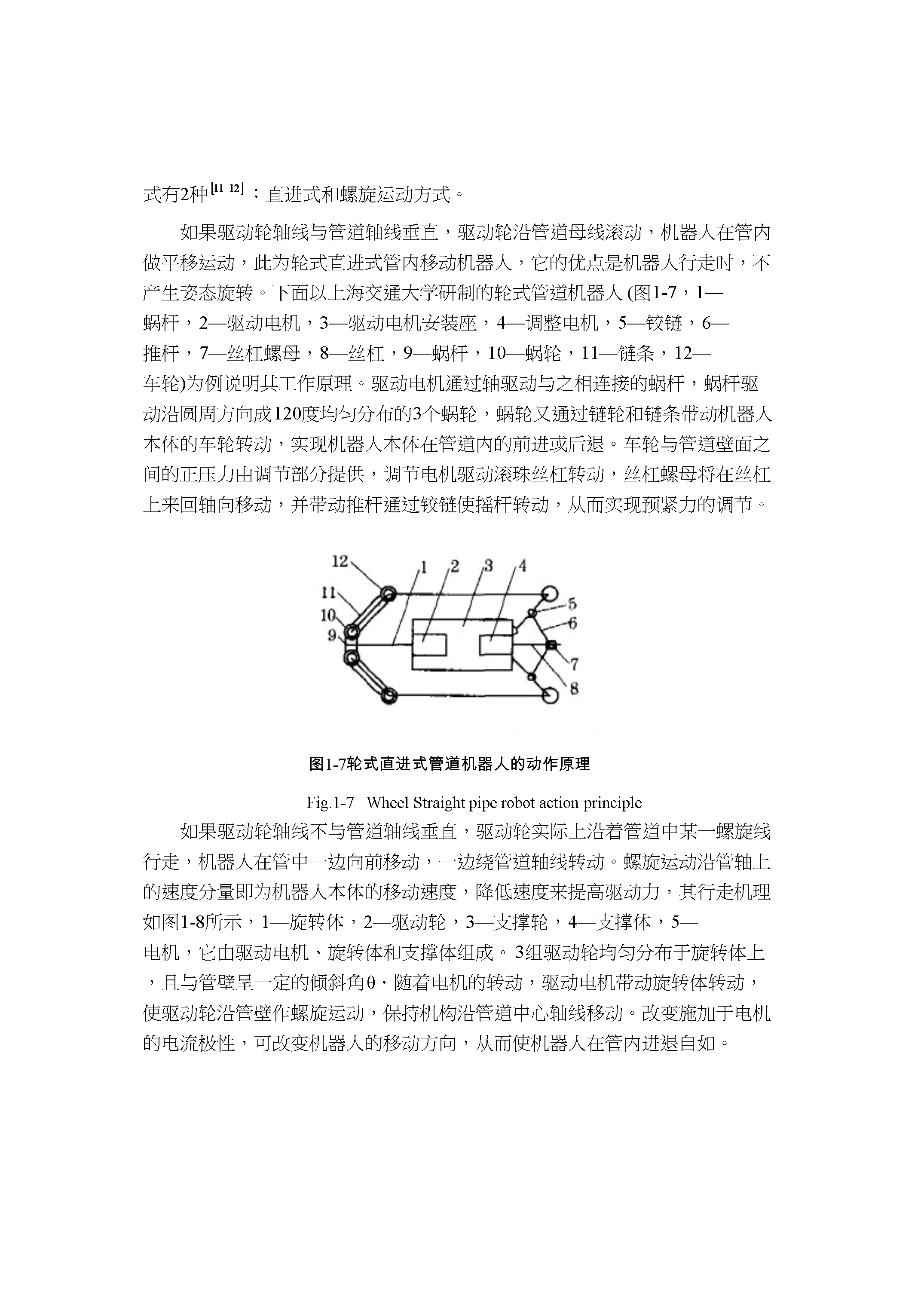
管道射线探伤机器人结构设计青岛科技大学本科毕业设计(论文)前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一,长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中,在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针,长输油气管道的数量在不断增加。由于历史原因,国内在役长输油气管道中部分管材制管质量较差,加上施工建设过程中存在部分焊接缺陷和涂层缺陷,这给管道的安全运行埋下隐患,即使部分投产验收合格的管道,
10论文正文 管道履带式机器人.docx
管道射线探伤机器人结构设计青岛科技大学本科毕业设计(论文)前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一,长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中,在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针,长输油气管道的数量在不断增加。由于历史原因,国内在役长输油气管道中部分管材制管质量较差,加上施工建设过程中存在部分焊接缺陷和涂层缺陷,这给管道的安全运行埋下隐患,即使部分投产验收合格的管道,

10论文正文 管道履带式机器人.doc
前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针长输油气管道的数量在不断增加。由于历史原因国内在役长输油气管道中部分管材制管质量较差加上施工建设过程中存在部分焊接缺陷和涂层缺陷这给管道的安全运行埋下隐患即使部分投产验收合格的管道在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素影响服役一段时间后产生缺陷或导致缺陷扩展并可能最终
10论文正文 管道履带式机器人.docx
青岛科技大学本科毕业设计(论文)61管道射线探伤机器人结构设计60前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一,长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中,在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针,长输油气管道的数量在不断增加。由于历史原因,国内在役长输油气管道中部分管材制管质量较差,加上施工建设过程中存在部分焊接缺陷和涂层缺陷,这给管道的安全运行埋下隐患,即使部分投产验收合格的管道,在运行过程中也难免受到介质、

10论文正文 管道履带式机器人.docx
前言油气管道输送是与铁路、公路、水运、航运并列的五大运输行业之一长输油气管道作为一种特殊设备广泛应用于石油、石化、化工等工业领域以及城市燃气系统中在国民经济中占有重要地位。随着“开发大西部”以及“西气东输”的战略指导方针长输油气管道的数量在不断增加。由于历史原因国内在役长输油气管道中部分管材制管质量较差加上施工建设过程中存在部分焊接缺陷和涂层缺陷这给管道的安全运行埋下隐患即使部分投产验收合格的管道在运行过程中也难免受到介质、温度、疲劳、腐蚀、局部载荷等因素影响服役一段时间后产生缺陷或导致缺陷扩展并可能最终