
导航接收机盲自适应空时阵列抗干扰方法.pdf

小寄****淑k

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

导航接收机盲自适应空时阵列抗干扰方法.pdf
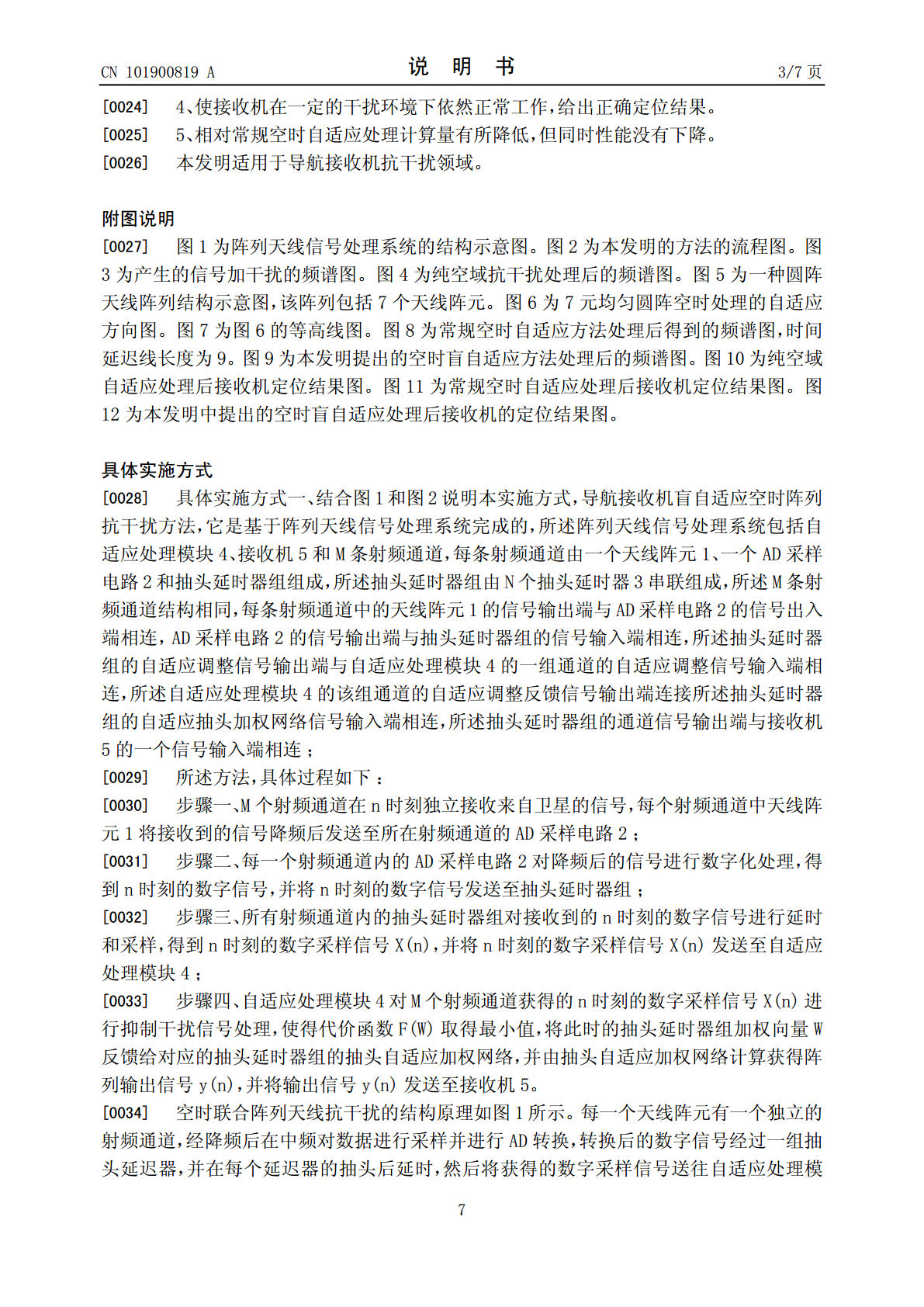
导航接收机盲自适应空时阵列抗干扰方法,涉及一种导航接收机的抗干扰方法,解决了现有的抗干扰技术抑制宽带干扰时,存在计算量大、误差严重的问题,它是基于阵列天线信号处理系统完成的,所述阵列天线信号处理系统包括射频通道、自适应处理模块和接收机组成,每个射频通道与自适应处理模块相连,自适应处理模块反馈给射频通道,射频通道与接收机相连;具体过程入下:每个射频通道,经降频后在中频对数据进行AD采样,采样后经过抽头延迟器组,并在每个抽头延迟器后延时,再将信号送往自适应处理模块,由模块根据设计计算加权,最后将各个抽头进行加

基于正交约束的导航接收机空时自适应方法.docx
基于正交约束的导航接收机空时自适应方法概述导航接收机的空时自适应方法是一种利用信号处理和算法优化方法,优化接收机空间接收性能,提高导航精度的技术。本文将介绍基于正交约束的导航接收机空时自适应方法,该方法利用正交约束技术对接收信号进行处理,提高接收机的鲁棒性和准确性。该方法应用于GPS定位系统、北斗定位系统等,可以有效提高导航应用的可靠性和稳定性。介绍随着导航应用的不断普及和应用范围的不断扩大,提高导航精度和可靠性成为重要的研究方向。传统的导航接收机存在抗干扰性不足、多路径效应等问题,这些问题直接影响了导航

导航接收机天线阵列自适应抗干扰处理的研究的任务书.docx
导航接收机天线阵列自适应抗干扰处理的研究的任务书一、任务背景随着全球定位系统(GPS)技术的不断发展和应用,导航接收机天线阵列的性能要求越来越高。然而,在实际使用过程中,导航接收机天线阵列会遭受到来自各种干扰信号(如电磁干扰、人为干扰等)的威胁,从而降低了其定位和导航的精度和可靠性。因此,如何对导航接收机天线阵列进行自适应抗干扰处理,是当前需要研究和解决的重要问题。二、研究目的本研究的目的是针对导航接收机天线阵列的自适应抗干扰处理进行研究,探究实现导航接收机天线阵列自适应抗干扰的关键技术和算法,提高其定位

基于Householder多级最小模级联相消器导航接收机空时抗干扰方法.docx
基于Householder多级最小模级联相消器导航接收机空时抗干扰方法基于Householder多级最小模级联相消器导航接收机空时抗干扰方法摘要:在现代导航系统中,空时传输技术的应用旨在提高导航接收机的抗干扰性能。本文提出了一种基于Householder多级最小模级联相消器的空时抗干扰方法,该方法能够有效地降低多路径干扰和其他无线通信设备带来的干扰,提高导航接收机的定位精度和可靠性。通过系统建模和理论分析,本文证明了Householder多级最小模级联相消器在空时领域的有效性,并通过仿真实验验证了该方法的

基于数据选择Householder多级维纳滤波导航接收机空时抗干扰方法.docx
基于数据选择Householder多级维纳滤波导航接收机空时抗干扰方法基于数据选择Householder多级维纳滤波导航接收机空时抗干扰方法摘要:随着无线通信技术的快速发展,导航接收机在现代通信和导航系统中起着关键作用。然而,由于信号源的数量和干扰源的数量在同一频带内不断增加,导航接收机在面临严峻的干扰条件下往往无法正常工作。因此,本文提出了一种基于数据选择Householder多级维纳滤波导航接收机空时抗干扰方法,以提高导航接收机的抗干扰能力。引言导航接收机在航空、航海和汽车导航等领域中起着至关重要的作