
一种基于DSP的多目标跟踪方法及系统.pdf

夏萍****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于DSP的多目标跟踪方法及系统.pdf
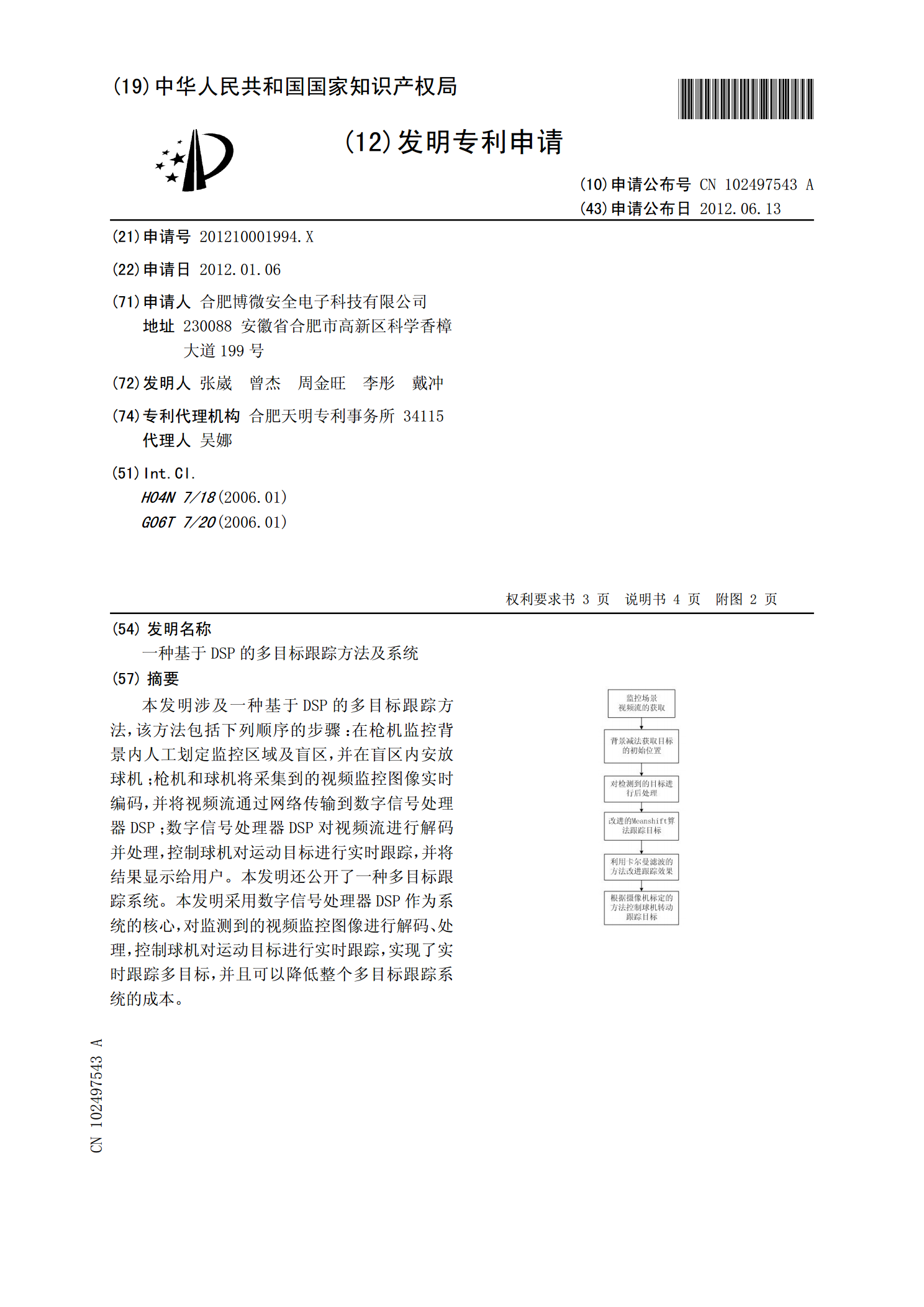
本发明涉及一种基于DSP的多目标跟踪方法,该方法包括下列顺序的步骤:在枪机监控背景内人工划定监控区域及盲区,并在盲区内安放球机;枪机和球机将采集到的视频监控图像实时编码,并将视频流通过网络传输到数字信号处理器DSP;数字信号处理器DSP对视频流进行解码并处理,控制球机对运动目标进行实时跟踪,并将结果显示给用户。本发明还公开了一种多目标跟踪系统。本发明采用数字信号处理器DSP作为系统的核心,对监测到的视频监控图像进行解码、处理,控制球机对运动目标进行实时跟踪,实现了实时跟踪多目标,并且可以降低整个多目标跟踪

一种基于跟踪链的多目标跟踪方法及系统.pdf
本发明提供了一种基于跟踪链的多目标跟踪方法及系统;其中,所述方法包括:按照预设间隔对监控图像中的第一目标对象进行识别,根据识别结果生成第一跟踪链;当所述第一目标对象识别失败时,修改所述第一跟踪链的状态;对新识别到的第二目标对象生成第二跟踪链;计算所述第一跟踪链和所述第二跟踪链的相似度,根据所述相似度将所述第一跟踪链和所述第二跟踪链进行串接;本发明的方法能够简单、高效地实现对多目标对象的同步跟踪,而且不会因为遮挡而造成跟踪失败,具有更高的可靠性。

基于DSP的多目标跟踪系统算法研究的中期报告.docx
基于DSP的多目标跟踪系统算法研究的中期报告本报告介绍了基于DSP的多目标跟踪系统算法的研究进展。该系统旨在实现对多目标的实时跟踪和识别,适用于各种领域的应用,如安防监控、智能交通、机器人导航等。在前期研究中,我们已经完成了系统的硬件设计和软件框架搭建,建立了多目标跟踪的数学模型,并初步探索了一些基于传统算法的跟踪方法。但这种方法的适用范围受到了很大限制,无法应对目标快速运动、遮挡等复杂情况。因此,在本期研究中,我们着重探索了基于深度学习的多目标跟踪算法。我们通过对跟踪样本进行有针对性的数据增强和数据清洗

一种多目标数据跟踪方法及系统.pdf
本发明涉及一种多目标数据跟踪方法及系统,其方法包括:获取多个传感器的测量数据以及多个预测数据,并根据每个传感器的测量数据和多个预测数据的向量相关一致性,对每个测量目标和每个预测目标进行匹配;统计每个测量目标和每个预测目标的匹配成功的次数,并根据其构建关联矩阵;根据基于运动学模型的卡尔曼滤波方法和所述关联矩阵,对所述测量目标和预测目标进行管理。本发明通过基于向量相关一致性的匹配方法,解决了最大匹配算法导致出现误差的问题,实现了实时多传感器多目标数据跟踪和预测。

一种基于工厂化养殖的对虾多目标跟踪系统及方法.pdf
本发明公开了一种基于工厂化养殖的对虾多目标跟踪系统及方法,属于目标追踪技术领域。本发明中,在YOLOv3模型的基础上,将模型的骨干网络Darknet53引入Mish函数,并增加了Focus模块、空间金字塔池化模块、特征金字塔模块,提出了基于改进Yolov3的对虾多目标跟踪方法,融合了改进Yolov3目标检测和DeepSort对虾多目标跟踪模型能够实现实际养殖环境下的对虾多目标实时跟踪,可为实现对虾大规模养殖的精准管理提供良好的技术支持。