
基于深度图像映射的三维网格模型盲水印方法.pdf

慧娇****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度图像映射的三维网格模型盲水印方法.pdf
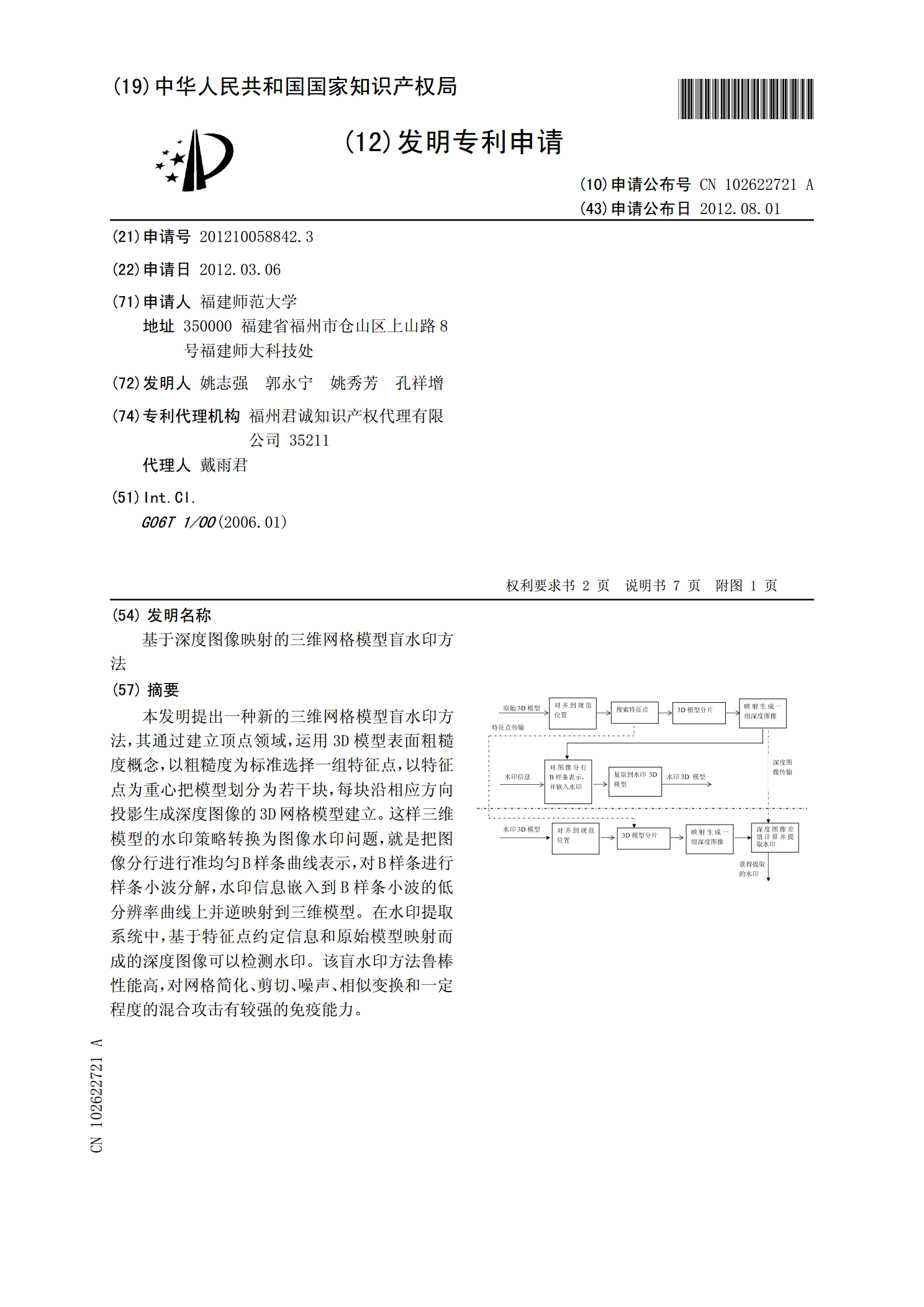
本发明提出一种新的三维网格模型盲水印方法,其通过建立顶点领域,运用3D模型表面粗糙度概念,以粗糙度为标准选择一组特征点,以特征点为重心把模型划分为若干块,每块沿相应方向投影生成深度图像的3D网格模型建立。这样三维模型的水印策略转换为图像水印问题,就是把图像分行进行准均匀B样条曲线表示,对B样条进行样条小波分解,水印信息嵌入到B样条小波的低分辨率曲线上并逆映射到三维模型。在水印提取系统中,基于特征点约定信息和原始模型映射而成的深度图像可以检测水印。该盲水印方法鲁棒性能高,对网格简化、剪切、噪声、相似变换和一
基于图像的三维网格模型盲水印方法.pdf
本发明涉及一种基于图像的三维网格模型盲水印方法。现有方法稳定性不好。本发明方法包括嵌入水印方法和提取水印方法,其中嵌入水印方法利用Fourier加法性质将水印间接嵌入网格模型顶点坐标上,即先将水印嵌入一个稳定图像中,然后将嵌入水印后的图像和原始图像进行比较得到水印信息,最后将水印信息嵌入网格模型顶点坐标上得到嵌入水印的三维网格模型。本发明方法提取水印不需要原始网格,不需要预处理,可以抵抗很多攻击,攻击包括加噪、光滑、增强、旋转、平移、缩放、重采样、裁剪和一些组合攻击。
基于网格分割的三维网格模型非盲水印实现方法.pdf
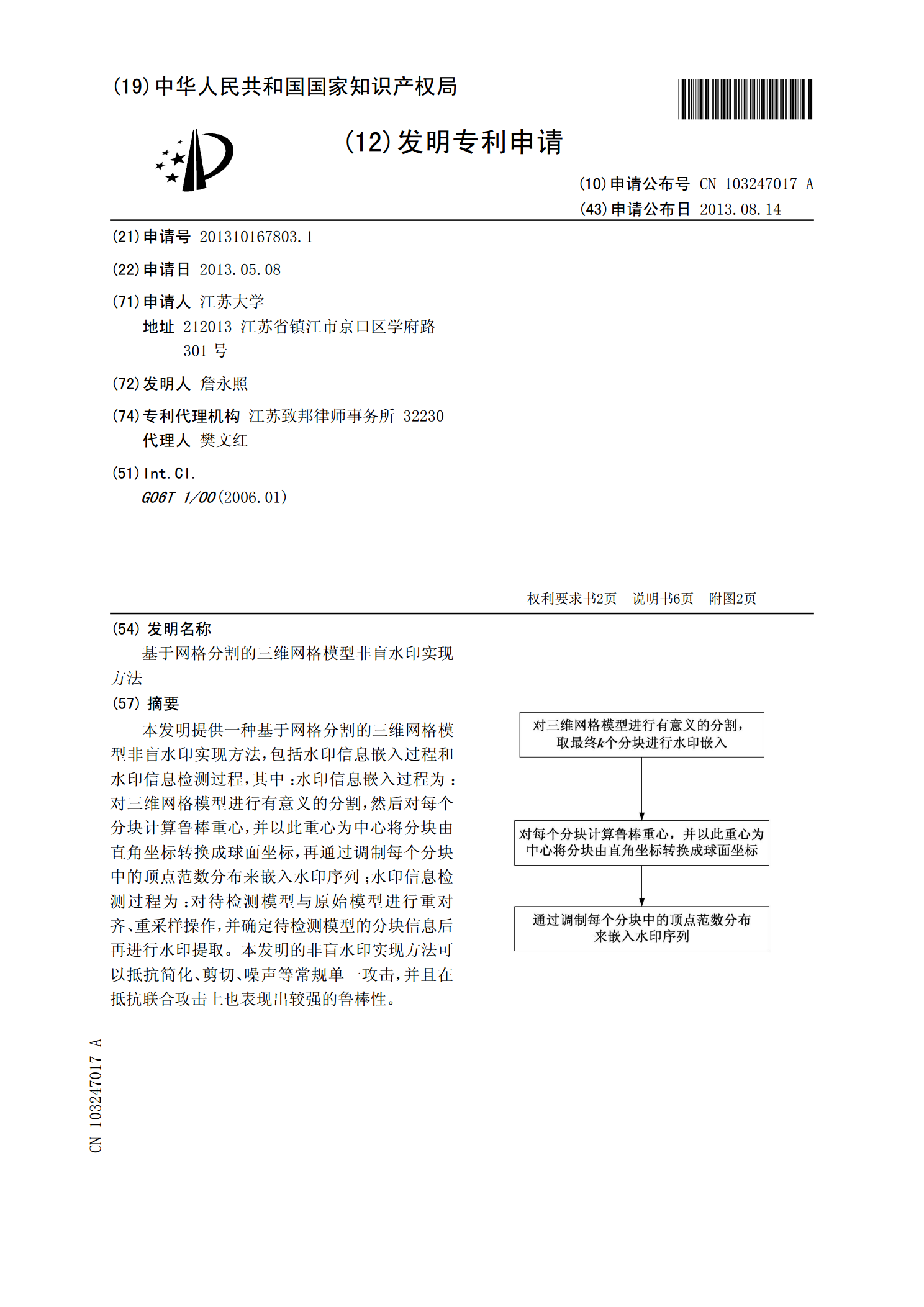
本发明提供一种基于网格分割的三维网格模型非盲水印实现方法,包括水印信息嵌入过程和水印信息检测过程,其中:水印信息嵌入过程为:对三维网格模型进行有意义的分割,然后对每个分块计算鲁棒重心,并以此重心为中心将分块由直角坐标转换成球面坐标,再通过调制每个分块中的顶点范数分布来嵌入水印序列;水印信息检测过程为:对待检测模型与原始模型进行重对齐、重采样操作,并确定待检测模型的分块信息后再进行水印提取。本发明的非盲水印实现方法可以抵抗简化、剪切、噪声等常规单一攻击,并且在抵抗联合攻击上也表现出较强的鲁棒性。

基于圆锥曲面反射映射的彩色图像盲水印方法.docx
基于圆锥曲面反射映射的彩色图像盲水印方法基于圆锥曲面反射映射的彩色图像盲水印方法摘要:随着数字图像的广泛应用,保护图像的版权和验证图像的真实性变得越来越重要。为了实现这些目标,图像水印技术被广泛研究和应用。在本论文中,我们提出了一种基于圆锥曲面反射映射的彩色图像盲水印方法。该方法通过使用圆锥曲面反射映射来嵌入和提取水印,以实现对彩色图像的保护和鉴别。关键词:彩色图像;盲水印;圆锥曲面反射映射一、引言随着数字图像的普及,图像盗版和篡改问题日益突出,保护图像的版权和验证图像的真实性成为迫切的需求。图像水印技术

基于小波变换的三维网格模型盲水印算法.docx
基于小波变换的三维网格模型盲水印算法基于小波变换的三维网格模型盲水印算法摘要:随着信息传输和存储的普及,保护三维网格模型的安全性越来越重要。为了实现对三维网格模型进行有效的版权保护和认证,本文提出了一种基于小波变换的三维网格模型盲水印算法。通过将水印嵌入到三维网格模型的小波域中,实现对模型的身份认证和版权保护。实验结果表明,所提出的算法在保证水印信息安全性和模型质量的前提下,具有较高的嵌入容量和鲁棒性。关键词:三维网格模型,小波变换,盲水印算法,身份认证,版权保护1.引言随着计算机图形学和三维建模的普及应