
基于峭度的变步长自适应盲源分离方法.pdf

春岚****23

1/8
2/8
3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于峭度的变步长自适应盲源分离方法.pdf
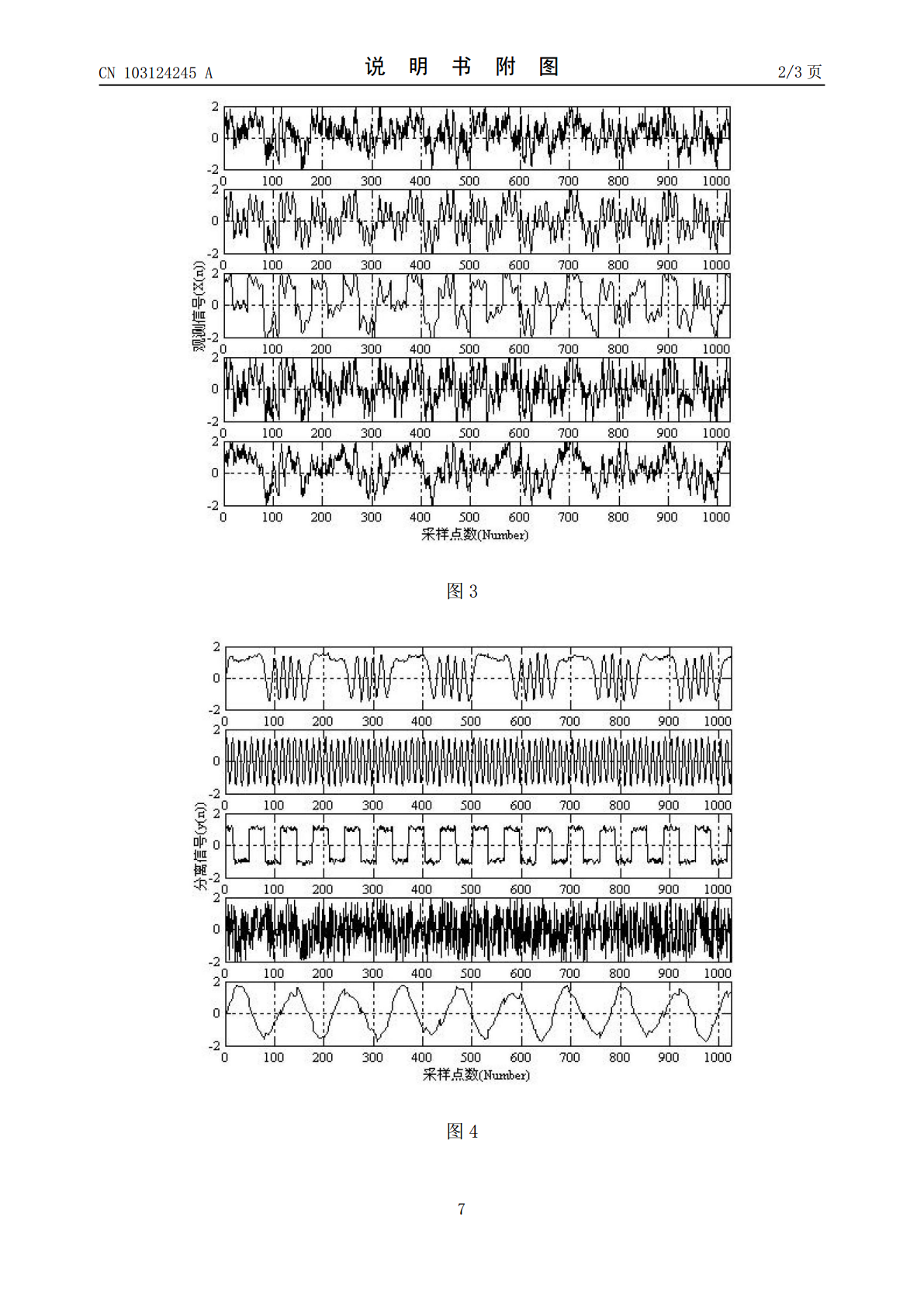
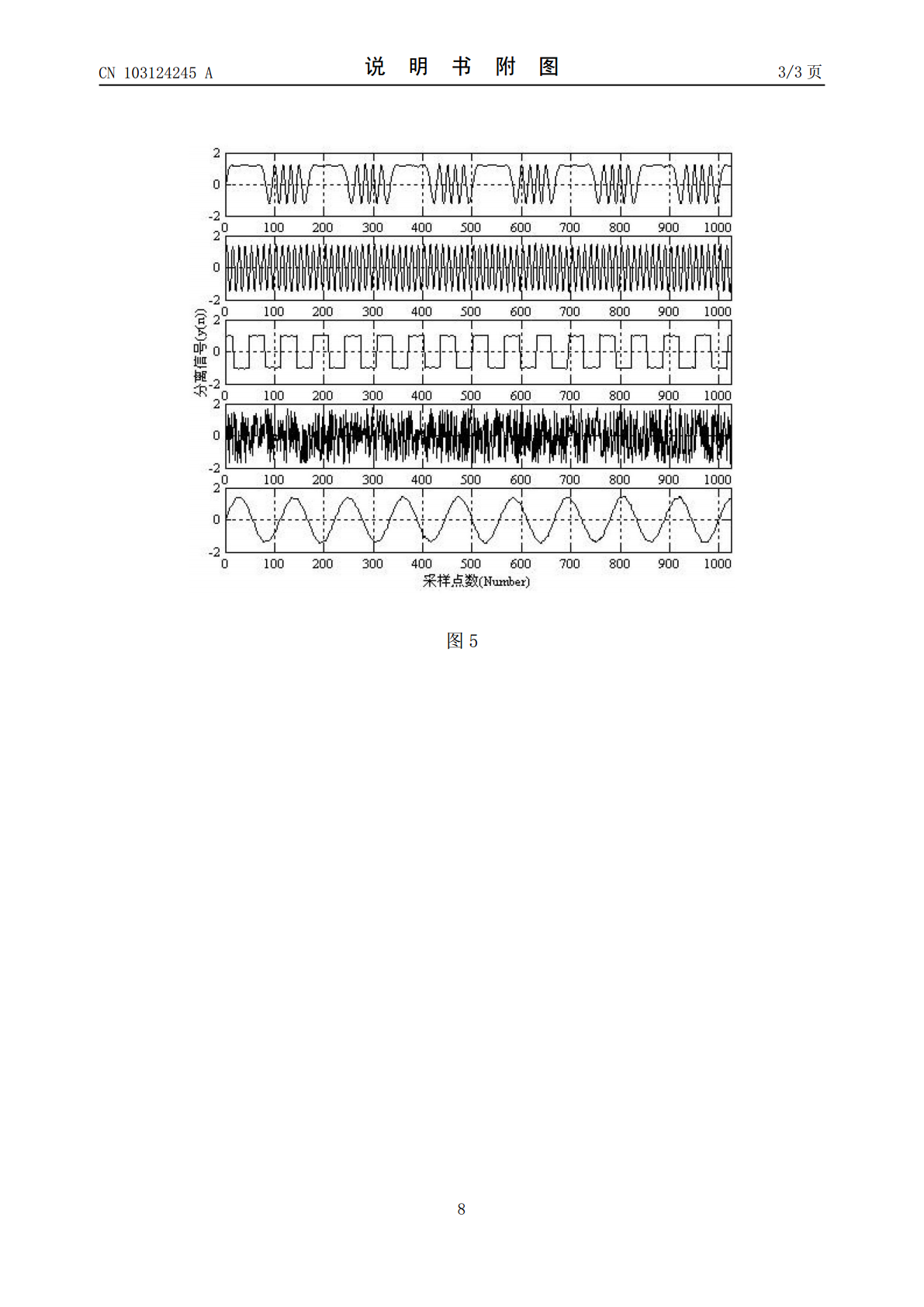
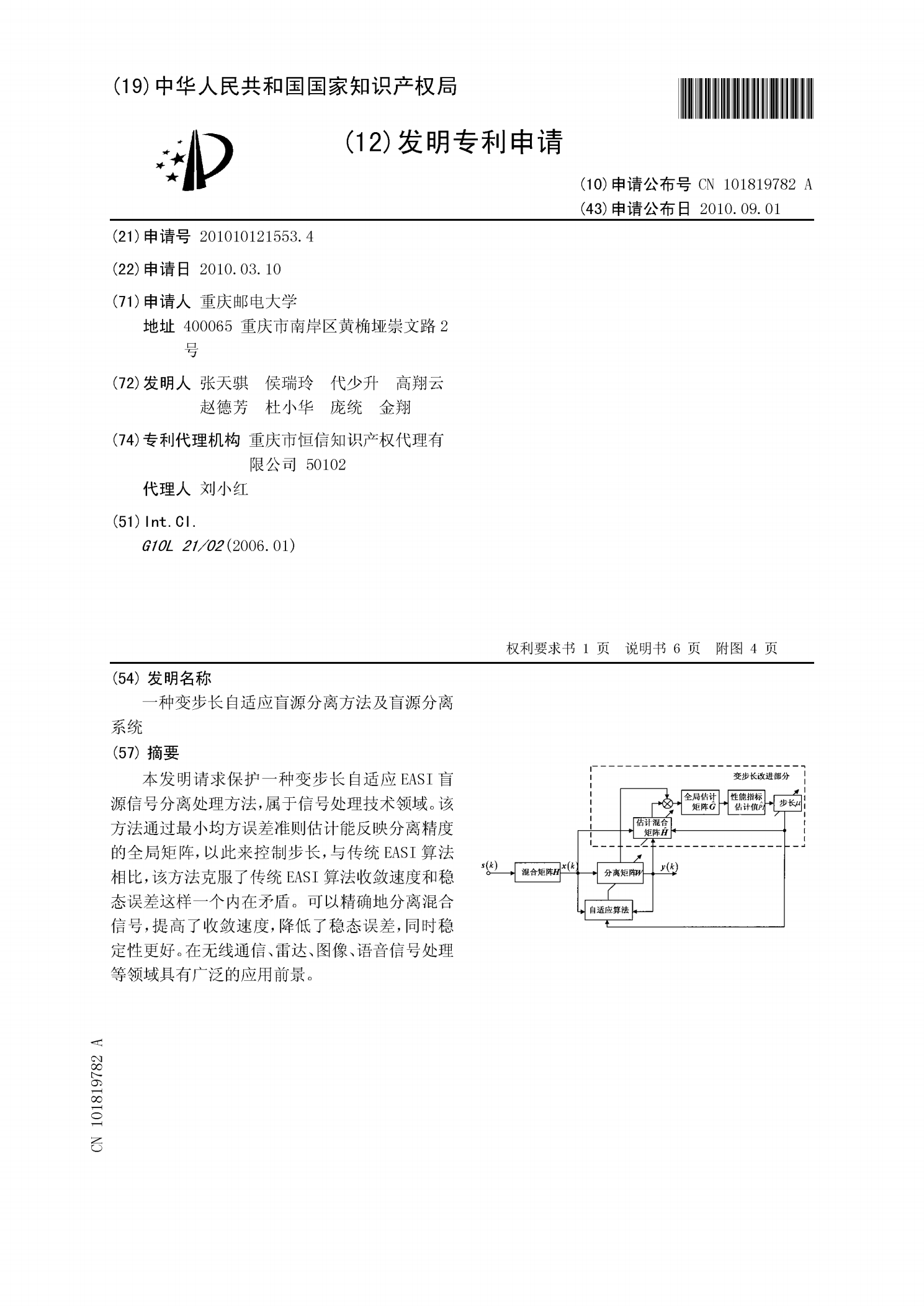
本发明公开了一种基于峭度的变步长自适应盲源分离方法,旨在通过峭度来判断算法的解与最优解的距离,在线地调整步长,通过不断优化分离矩阵达到自适应的目的,它具体内容包括以下步骤:1、对观测信号进行白化预处理;2、利用白化处理后的信号对分离矩阵W进行迭代;3、得到最优矩阵,实现源信号分离。本发明的有益效果在于:利用峭度的变化来控制步长;通过峭度来判断算法的解与最优解的距离,在线地调整步长,通过不断优化分离矩阵达到自适应的目的;解决了盲源分离过程中收敛速度与稳态误差之间的矛盾。
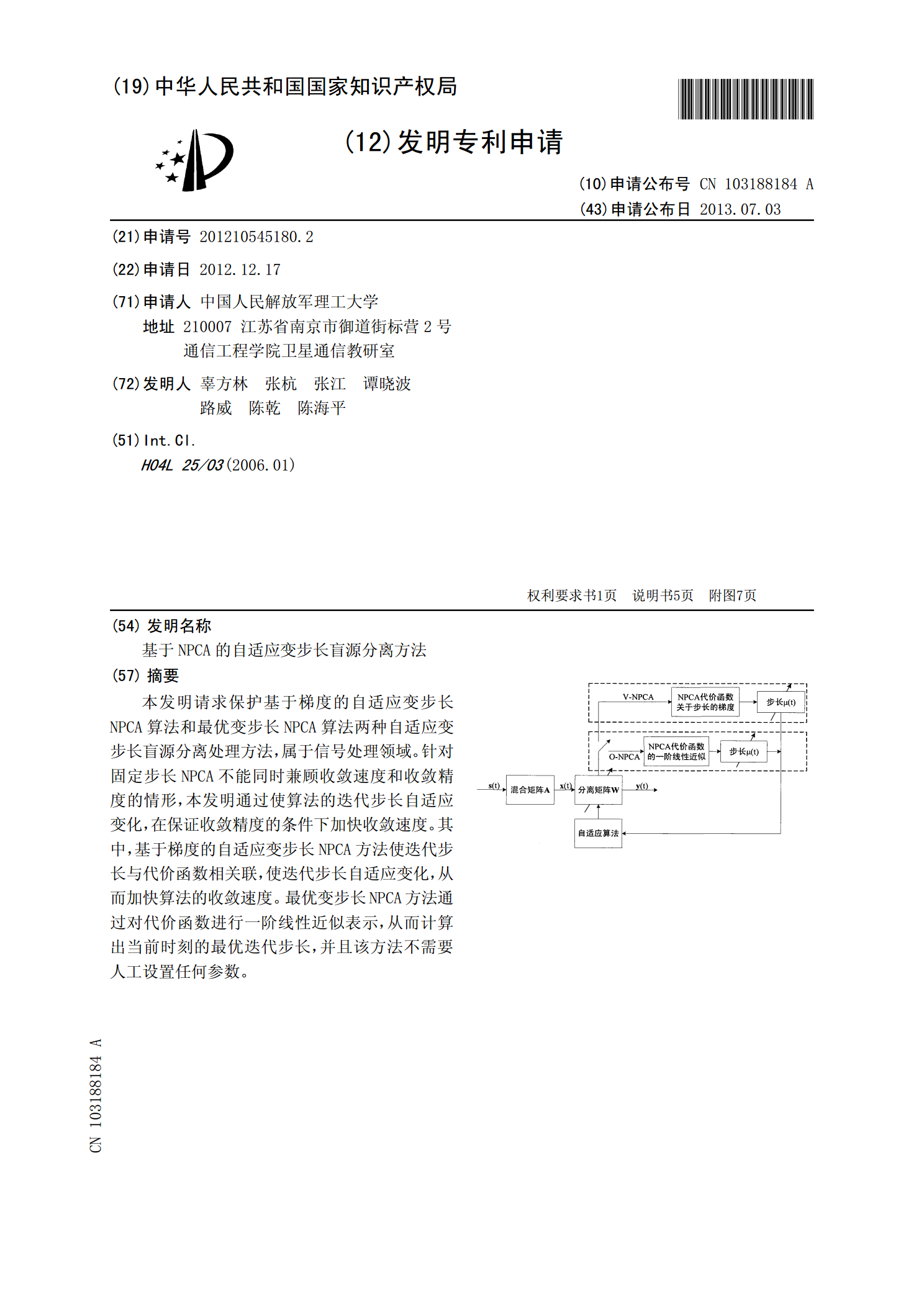
一种变步长自适应盲源分离方法及盲源分离系统.pdf
本发明请求保护一种变步长自适应EASI盲源信号分离处理方法,属于信号处理技术领域。该方法通过最小均方误差准则估计能反映分离精度的全局矩阵,以此来控制步长,与传统EASI算法相比,该方法克服了传统EASI算法收敛速度和稳态误差这样一个内在矛盾。可以精确地分离混合信号,提高了收敛速度,降低了稳态误差,同时稳定性更好。在无线通信、雷达、图像、语音信号处理等领域具有广泛的应用前景。
基于NPCA的自适应变步长盲源分离方法.pdf
本发明请求保护基于梯度的自适应变步长NPCA算法和最优变步长NPCA算法两种自适应变步长盲源分离处理方法,属于信号处理领域。针对固定步长NPCA不能同时兼顾收敛速度和收敛精度的情形,本发明通过使算法的迭代步长自适应变化,在保证收敛精度的条件下加快收敛速度。其中,基于梯度的自适应变步长NPCA方法使迭代步长与代价函数相关联,使迭代步长自适应变化,从而加快算法的收敛速度。最优变步长NPCA方法通过对代价函数进行一阶线性近似表示,从而计算出当前时刻的最优迭代步长,并且该方法不需要人工设置任何参数。
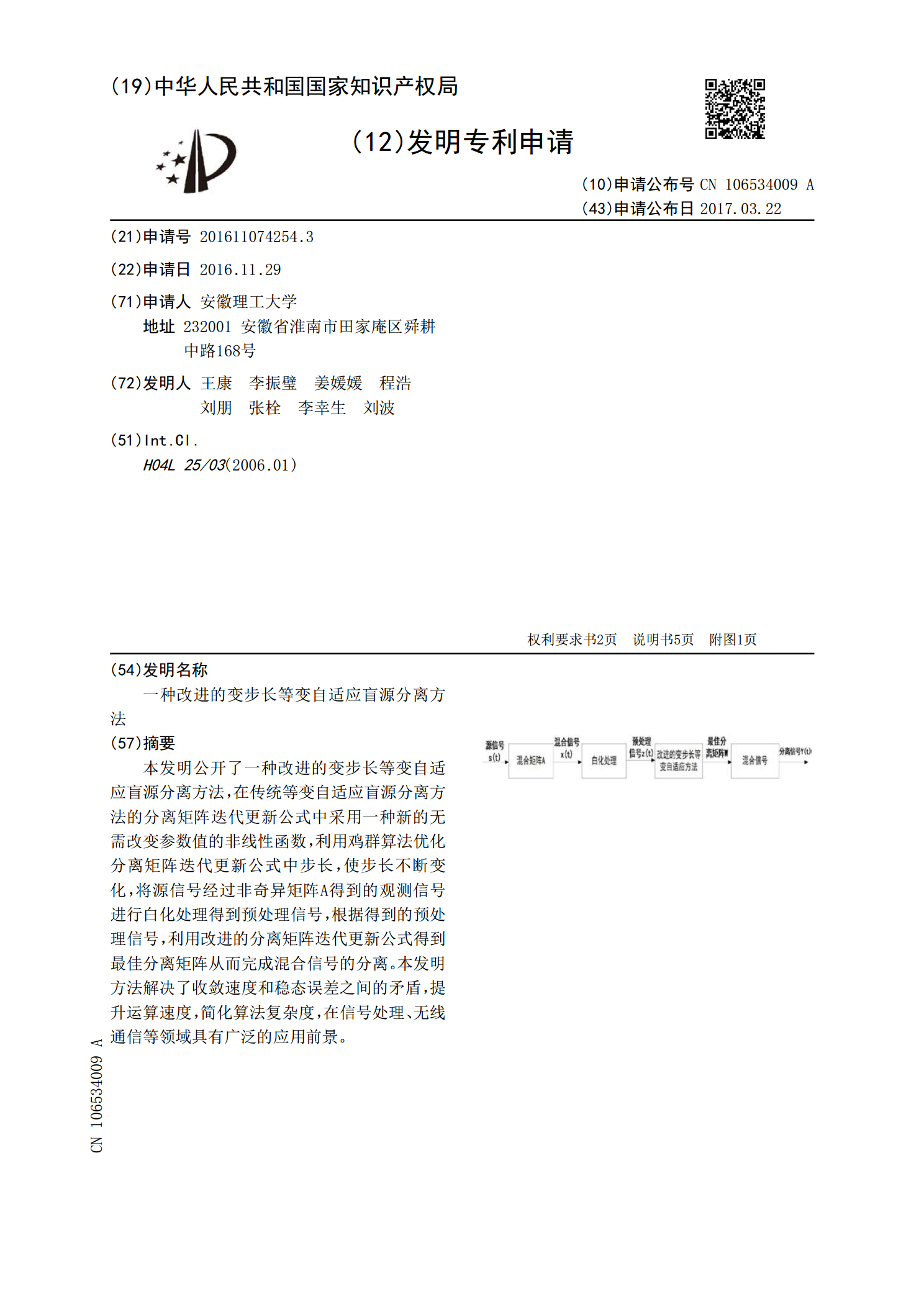
一种改进的变步长等变自适应盲源分离方法.pdf
本发明公开了一种改进的变步长等变自适应盲源分离方法,在传统等变自适应盲源分离方法的分离矩阵迭代更新公式中采用一种新的无需改变参数值的非线性函数,利用鸡群算法优化分离矩阵迭代更新公式中步长,使步长不断变化,将源信号经过非奇异矩阵A得到的观测信号进行白化处理得到预处理信号,根据得到的预处理信号,利用改进的分离矩阵迭代更新公式得到最佳分离矩阵从而完成混合信号的分离。本发明方法解决了收敛速度和稳态误差之间的矛盾,提升运算速度,简化算法复杂度,在信号处理、无线通信等领域具有广泛的应用前景。
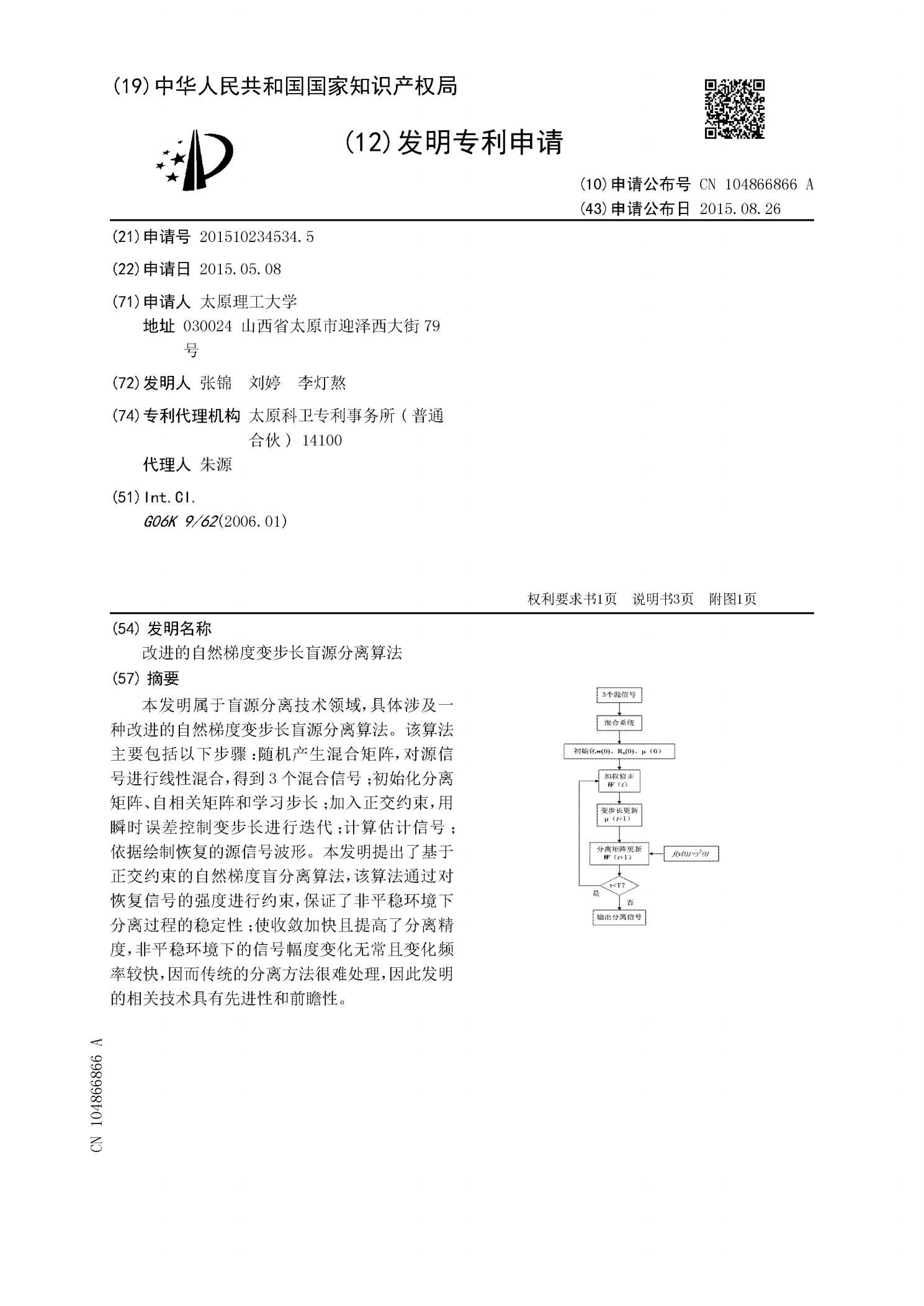
改进的自然梯度变步长盲源分离算法.pdf
本发明属于盲源分离技术领域,具体涉及一种改进的自然梯度变步长盲源分离算法。该算法主要包括以下步骤:随机产生混合矩阵,对源信号进行线性混合,得到3个混合信号;初始化分离矩阵、自相关矩阵和学习步长;加入正交约束,用瞬时误差控制变步长进行迭代;计算估计信号;依据绘制恢复的源信号波形。本发明提出了基于正交约束的自然梯度盲分离算法,该算法通过对恢复信号的强度进行约束,保证了非平稳环境下分离过程的稳定性;使收敛加快且提高了分离精度,非平稳环境下的信号幅度变化无常且变化频率较快,因而传统的分离方法很难处理,因此发明的相