
一种消除车柱盲区系统及其使用方法.pdf

Ch****75


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种消除车柱盲区系统及其使用方法.pdf
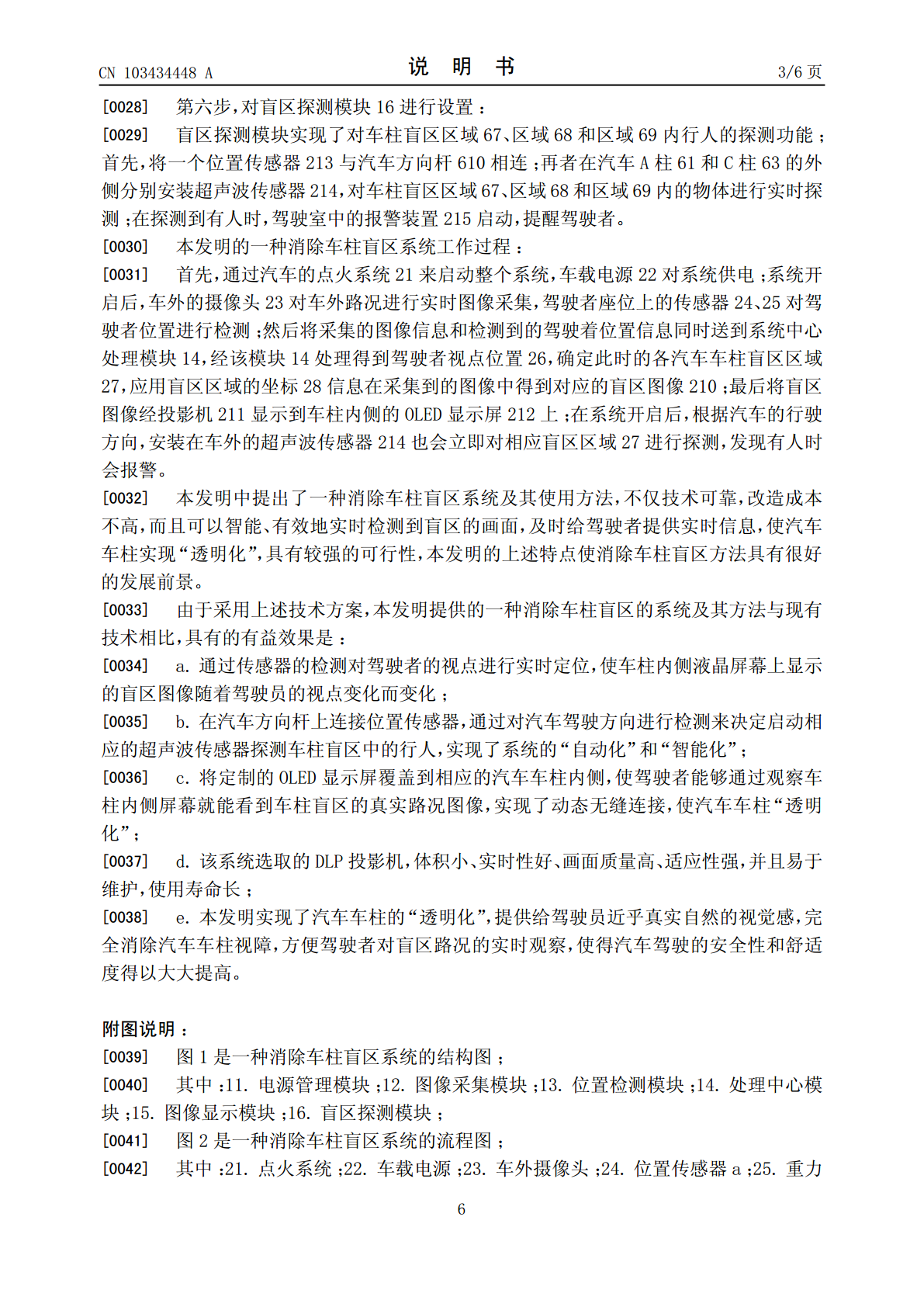
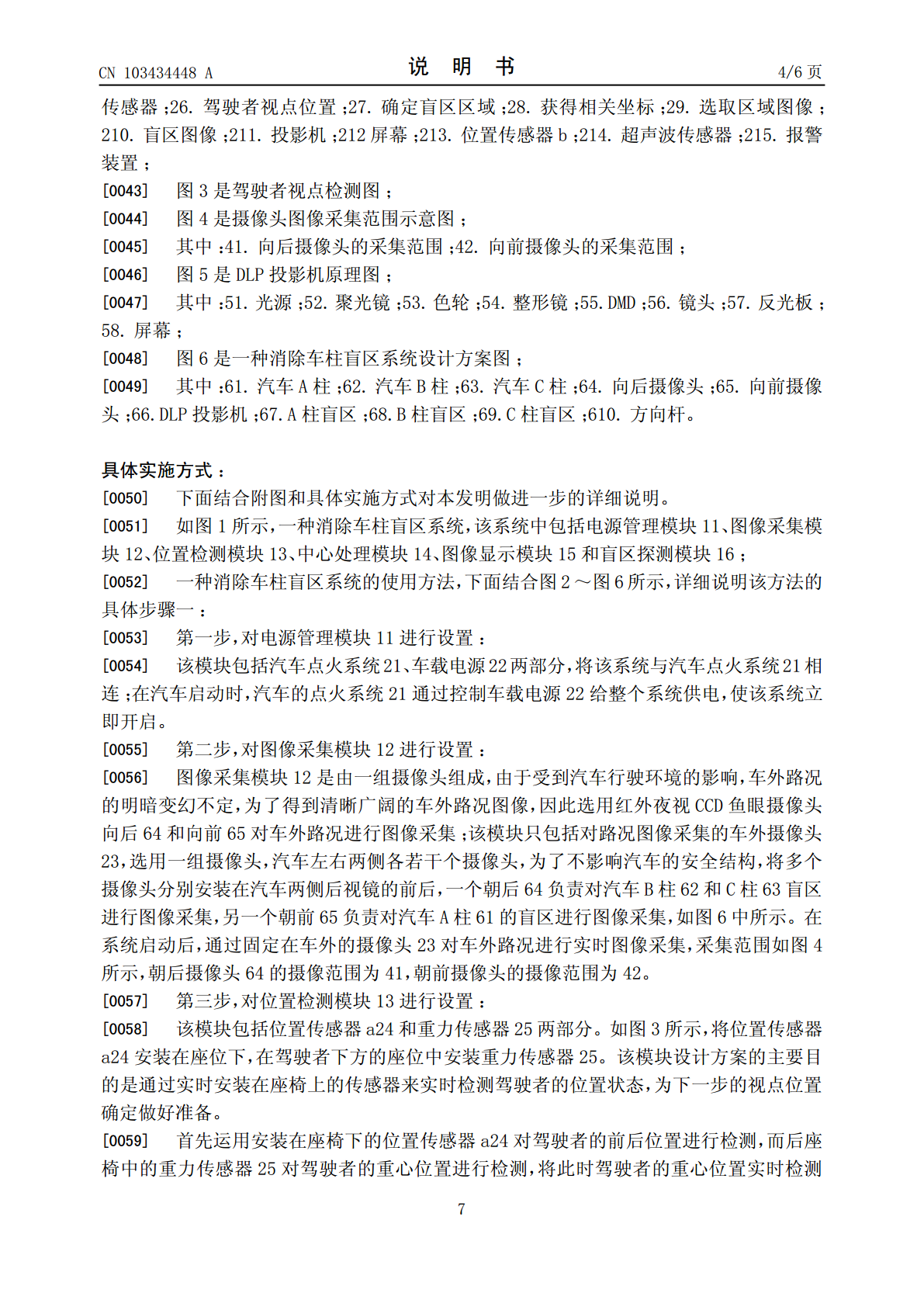
本发明公开了一种消除车柱盲区系统及其使用方法,其系统包括电源管理模块11、图像采集模块12、位置检测模块13、处理中心模块14、图像显示模块15和盲区探测模块16。本发明通过采用数字图像处理和投影技术来智能消除汽车车柱盲区,不仅技术可靠,改造成本不高,而且可以智能、有效地实时检测到盲区的画面,及时给驾驶者提供实时信息,使汽车车柱实现“透明化”。
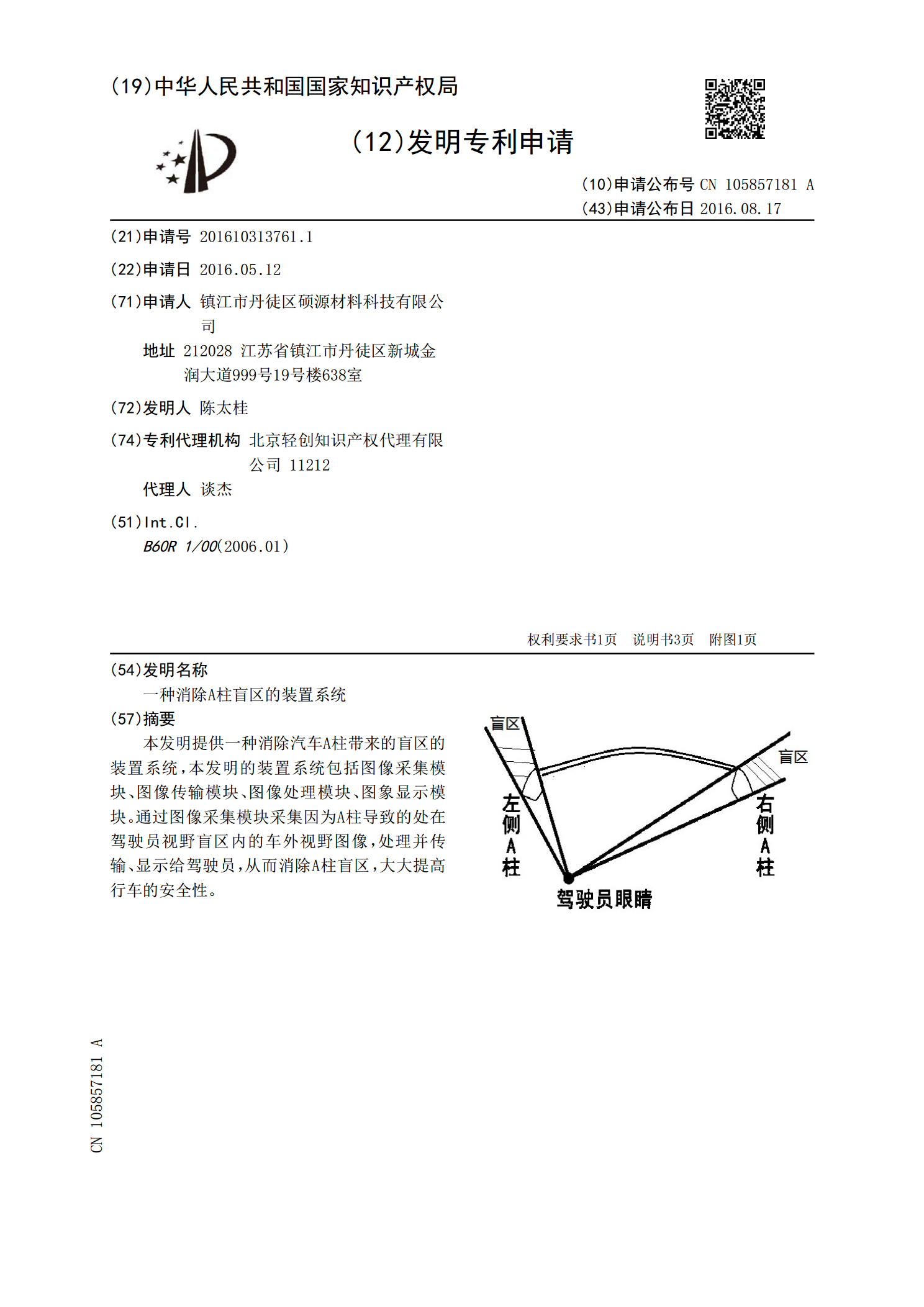
一种消除A柱盲区的装置系统.pdf
本发明提供一种消除汽车A柱带来的盲区的装置系统,本发明的装置系统包括图像采集模块、图像传输模块、图像处理模块、图象显示模块。通过图像采集模块采集因为A柱导致的处在驾驶员视野盲区内的车外视野图像,处理并传输、显示给驾驶员,从而消除A柱盲区,大大提高行车的安全性。

一种包含消除A柱盲区的系统的汽车.pdf
本发明提供一种包含消除A柱盲区的系统的汽车,本发明的汽车包括车轮与车体,其特征在于,该汽车包含了消除A柱盲区的系统。所述系统包括图像采集模块、图像传输模块、图像处理模块、图象显示模块。通过图像采集模块采集包含A柱盲区内的车外景象,处理并传输、实时显示给驾驶员,从而消除A柱盲区,大大提高行车的安全性。
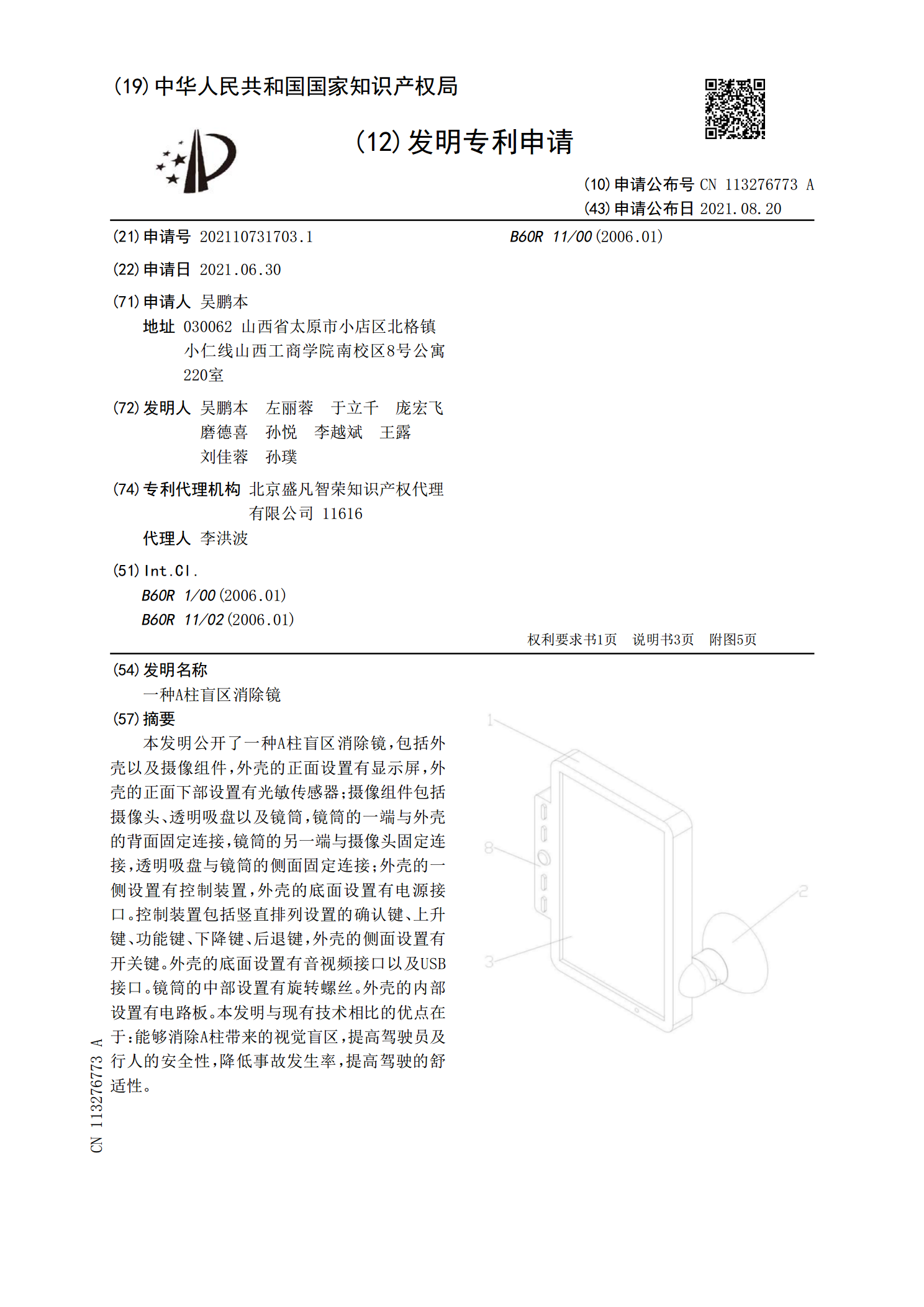
一种A柱盲区消除镜.pdf
本发明公开了一种A柱盲区消除镜,包括外壳以及摄像组件,外壳的正面设置有显示屏,外壳的正面下部设置有光敏传感器;摄像组件包括摄像头、透明吸盘以及镜筒,镜筒的一端与外壳的背面固定连接,镜筒的另一端与摄像头固定连接,透明吸盘与镜筒的侧面固定连接;外壳的一侧设置有控制装置,外壳的底面设置有电源接口。控制装置包括竖直排列设置的确认键、上升键、功能键、下降键、后退键,外壳的侧面设置有开关键。外壳的底面设置有音视频接口以及USB接口。镜筒的中部设置有旋转螺丝。外壳的内部设置有电路板。本发明与现有技术相比的优点在于:能够
消除A柱盲区装置和消除A柱盲区装置的控制方法.pdf
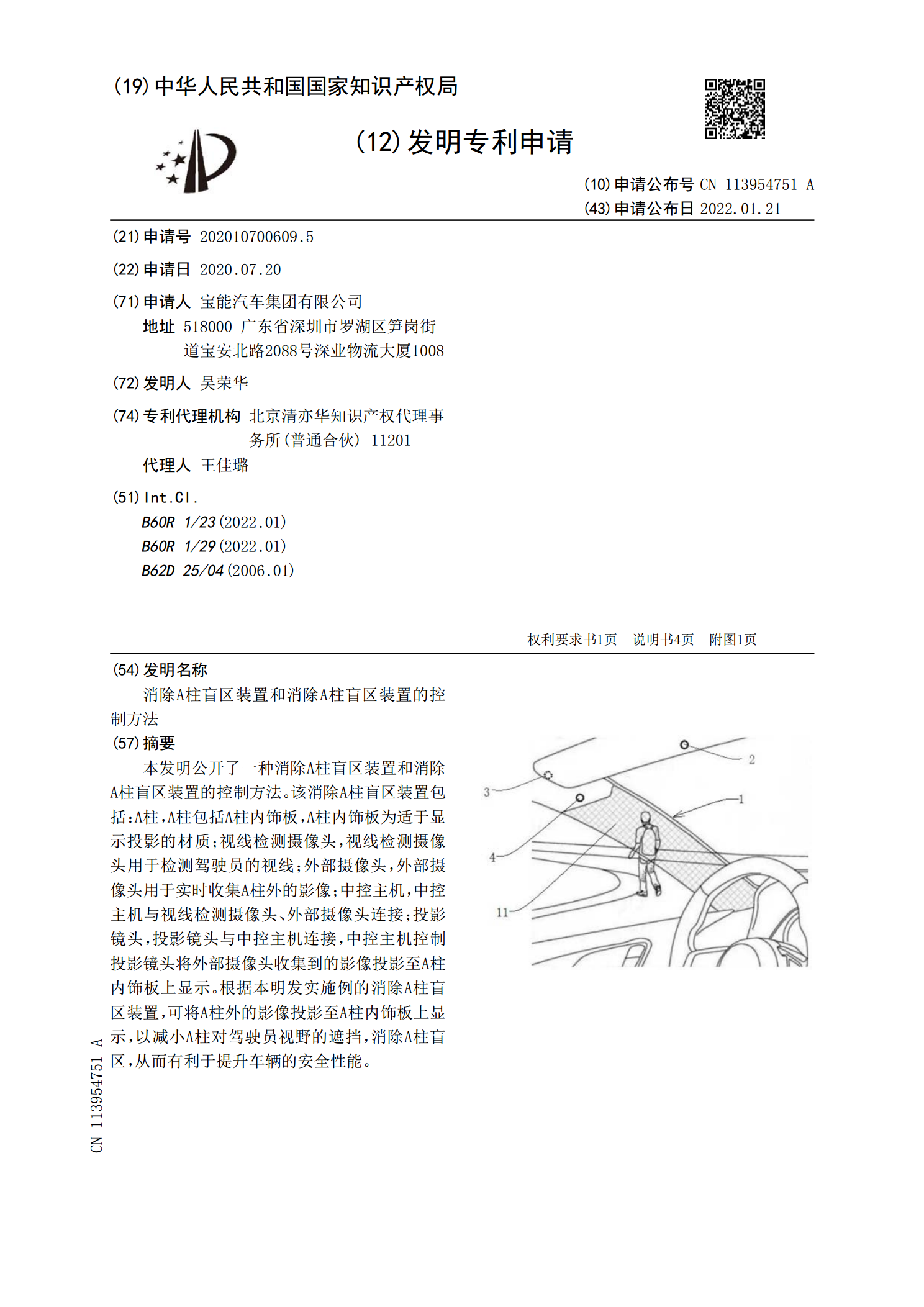
本发明公开了一种消除A柱盲区装置和消除A柱盲区装置的控制方法。该消除A柱盲区装置包括:A柱,A柱包括A柱内饰板,A柱内饰板为适于显示投影的材质;视线检测摄像头,视线检测摄像头用于检测驾驶员的视线;外部摄像头,外部摄像头用于实时收集A柱外的影像;中控主机,中控主机与视线检测摄像头、外部摄像头连接;投影镜头,投影镜头与中控主机连接,中控主机控制投影镜头将外部摄像头收集到的影像投影至A柱内饰板上显示。根据本明发实施例的消除A柱盲区装置,可将A柱外的影像投影至A柱内饰板上显示,以减小A柱对驾驶员视野的遮挡,消除A