
一种基于水声通信的多艇协同导航编队构型的方法.pdf

邻家****mk


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于水声通信的多艇协同导航编队构型的方法.pdf
本发明公开了一种基于水声通信的多艇协同导航编队构型的方法,该基于水声通信的多艇协同导航编队构型的方法包括以下步骤:通过根据协同导航系统模型建立系统状态方程、量测方程,利用非线性系统李导数可观测性理论对其进行可观测性分析,根据舰艇尾部螺旋桨产生的尾流建立水声通讯盲区模型,根据艇间安全距离确定安全区域模型,最终得到基于可观测性、尾流通讯盲区、艇间安全距离区域综合考虑情况下的无人艇编队构型设计方案。本发明实现了协同导航系统编队构型优化设计,适用于多艇协同导航情况下的编队构型设计。本发明忽略掉尾流的影响而得到的编

基于超短基线水声定位的USVUUV协同导航方法.docx
基于超短基线水声定位的USVUUV协同导航方法基于超短基线水声定位的USV/UUV协同导航方法摘要:随着无人水面舰船(USV)和无人水下航行器(UUV)的发展,USV/UUV协同导航成为了一个研究热点。本文针对这一问题,提出了一种基于超短基线水声定位的USV/UUV协同导航方法。该方法利用水声信号进行定位,通过多传感器融合实现USV/UUV位置信息的融合和精确定位,进而实现协同导航。关键词:超短基线水声定位、USV/UUV协同导航、多传感器融合1.引言随着科技的发展,无人水面舰船(USV)和无人水下航行器

基于声学通信的多AUV编队导航与协调控制.docx
基于声学通信的多AUV编队导航与协调控制声学通信是一种基于声波传输的通信方式,在水下环境中被广泛应用于水下机器人(AUV)的导航与协调控制中。本文将重点讨论基于声学通信的多AUV编队导航与协调控制的方法和应用。1.引言随着水下科学技术的发展,AUV在水下作业中扮演着越来越重要的角色。多AUV编队导航与协调控制是实现多个AUV之间配合工作的关键技术之一。声学通信作为一种适用于水下环境的通信手段,能够实现多个AUV之间的信息交流与共享,因此成为多AUV编队导航与协调控制的重要组成部分。2.声学通信原理声学通信

一种基于车车通信的列车协同编队运行装置及方法.pdf
本发明实施例提供了一种基于车车通信的列车协同编队运行装置及方法,通过列车上设置的IFO、相对测速单元和相对测距单元测量编队列车与编队前车的第一相对速度和第一相对距离。由于相对测速单元和相对测距单元的测量周期均较短,第一相对速度和第一相对距离具有较高的实时性和准确性,ITP在通过第一相对速度和第一相对距离确定目标速度曲线时,能够避免因测速和测距不及时编队列车无法随着编队前车及时更新速度,从而与编队前车间距过大的问题。此外,由于提高了测速和测距的实时性和准确性,ITP在确定目标速度曲线时即便不预留安全距离也能
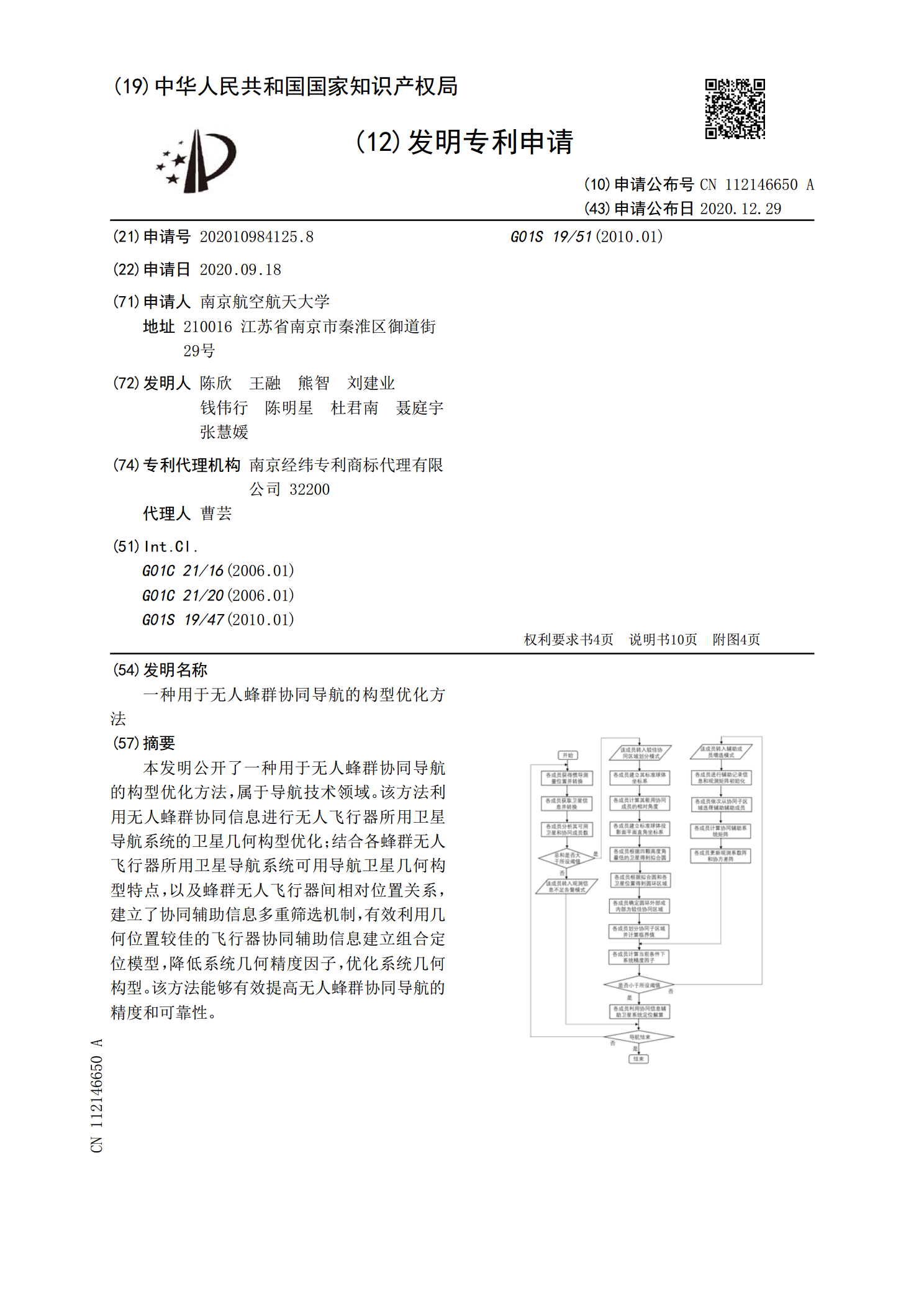
一种用于无人蜂群协同导航的构型优化方法.pdf
本发明公开了一种用于无人蜂群协同导航的构型优化方法,属于导航技术领域。该方法利用无人蜂群协同信息进行无人飞行器所用卫星导航系统的卫星几何构型优化;结合各蜂群无人飞行器所用卫星导航系统可用导航卫星几何构型特点,以及蜂群无人飞行器间相对位置关系,建立了协同辅助信息多重筛选机制,有效利用几何位置较佳的飞行器协同辅助信息建立组合定位模型,降低系统几何精度因子,优化系统几何构型。该方法能够有效提高无人蜂群协同导航的精度和可靠性。