
基于FFDIAG算法的雷达目标盲源分离方法.pdf

白凡****12

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于FFDIAG算法的雷达目标盲源分离方法.pdf
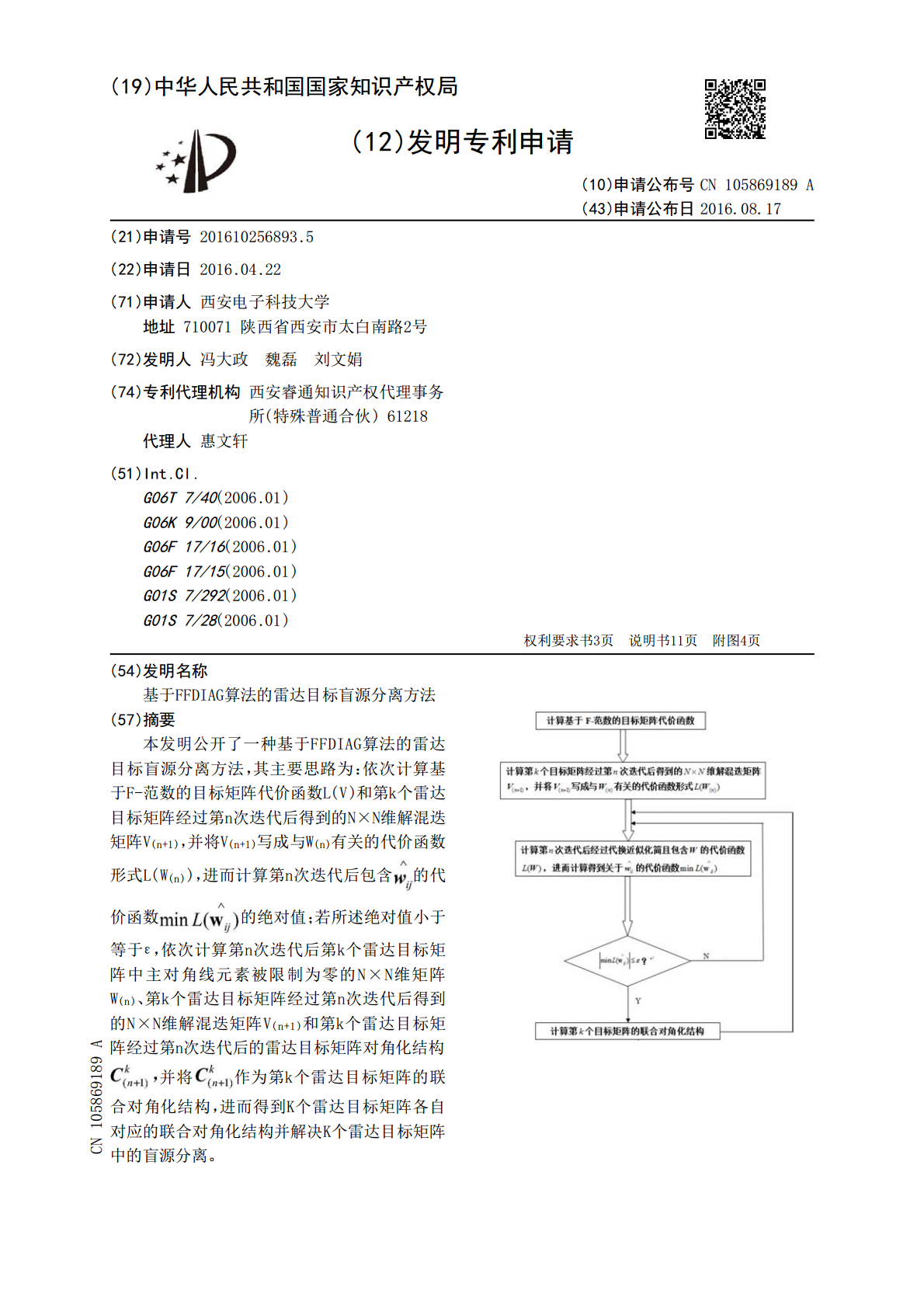
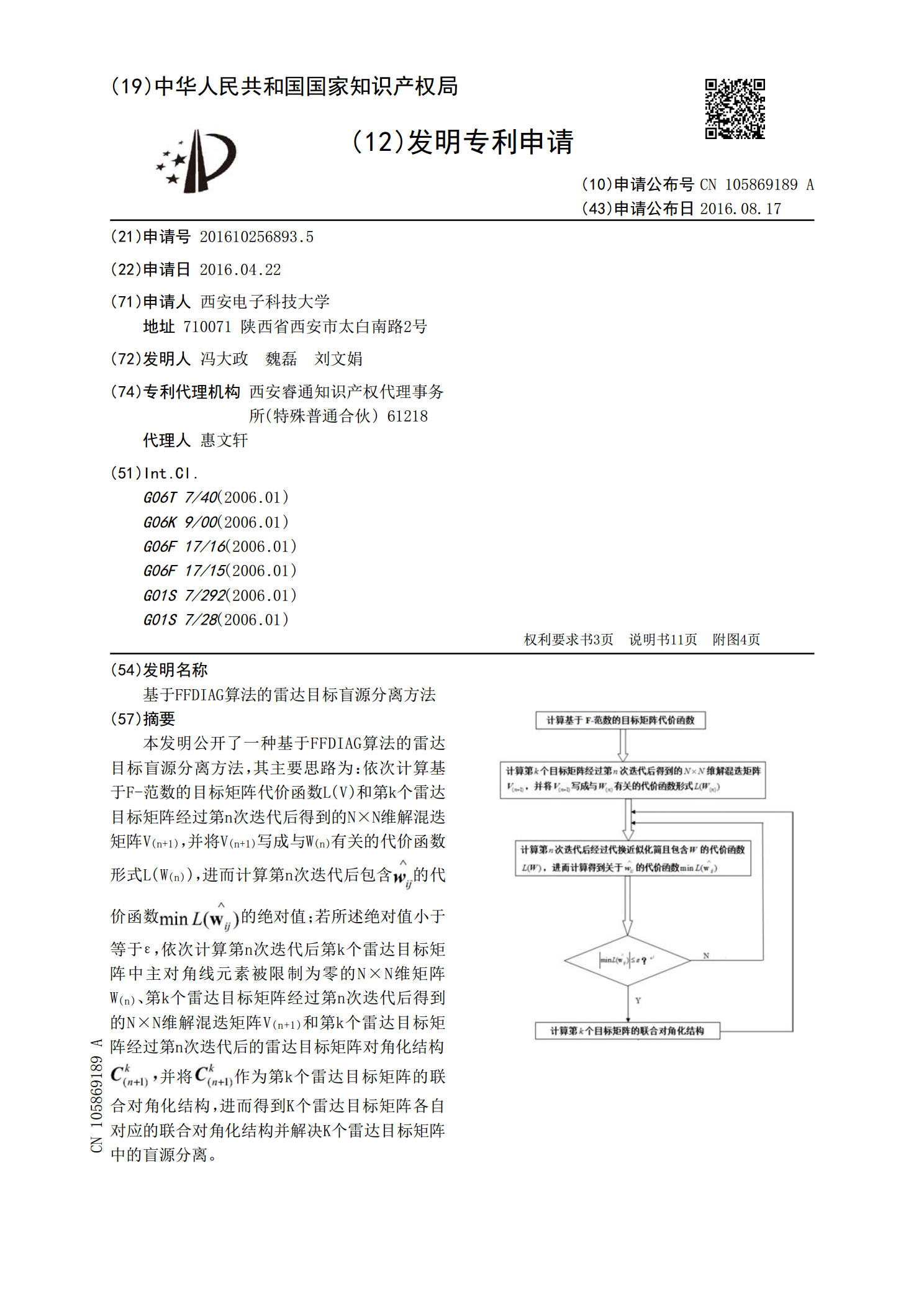
本发明公开了一种基于FFDIAG算法的雷达目标盲源分离方法,其主要思路为:依次计算基于F‑范数的目标矩阵代价函数L(V)和第k个雷达目标矩阵经过第n次迭代后得到的N×N维解混迭矩阵V

基于改进鲸鱼优化算法的盲源分离方法.docx
基于改进鲸鱼优化算法的盲源分离方法基于改进鲸鱼优化算法的盲源分离方法摘要:随着无线通信技术的发展,盲源分离成为了一个重要的研究方向。盲源分离是指在无先验知识的情况下,将混合信号中的各个成份分离出来。本文采用了基于改进鲸鱼优化算法的盲源分离方法,通过对混合信号进行适应度函数的定义和优化过程的改进,实现了较好的盲源分离效果。实验结果表明,该方法能够有效地分离出混合信号中的各个成份,具有很高的应用价值。关键词:混合信号;盲源分离;鲸鱼优化算法;适应度函数1.引言随着无线通信技术和信号处理技术的迅猛发展,各种混合

基于改进的排序算法的频域盲源分离算法.pdf
基于改进的排序算法的频域盲源分离算法,包括以下步骤:获取混合信号;对混合信号进行时频变换得到频域混合信号;对频域混合信号进行白化预处理;对预处理后的频域混合信号,在不同频点进行复数独立成分分析(ICA),得到各频点处独立成分;采用改进的排序算法对各频点独立成分进行排序;对排序后的频域信号进行时频反变换,得到时域信号。本发明相比时域算法具有稳定性强,复杂度低的优点;相比采用信号到达角、脉内特征等信号特征的频域盲源分离算法具有通用性强的优点。经实验,本发明对线性混合信号、卷积混合信号、实际混合信号都具有较好的

一种基于盲源分离的雷达抗主瓣干扰方法.pdf
本发明公开了一种基于盲源分离的雷达抗主瓣干扰方法,包括如下步骤:1)将多个通道混合数据按通道顺序排列接收向量;2)接收向量进行预白化;3)对白化后的接收向量进行盲源分离处理;4)根据雷达目标回波信号的先验知识,解决分离后的目标回波和干扰信号的模糊性。本发明将盲源分离应用于雷达抗主瓣干扰中,利用目标回波信号与干扰信号的不同,将回波信号和干扰信号分离,再利用目标回波信号的先验信息,解决分离后信号的不确定性。不仅能够抑制干扰信号对目标回波的影响,而且能够从混合信号中提取出干扰信号,通过对干扰信号的分析,采取更有

基于盲源分离算法的过程监测方法研究的开题报告.docx
基于盲源分离算法的过程监测方法研究的开题报告一、选题背景随着工业生产的不断发展和企业经营规模的不断扩大,对生产过程的监测与控制也越来越重要。传统工控领域的过程监测方法主要是基于模型的方法,也就是通过建立系统的数学模型来对生产过程进行监控和控制。但是,在实际应用中,模型的建立和维护工作都非常繁琐,对模型的精度和鲁棒性要求也非常高。因此,在一些实时性要求较高的场合,基于模型的方法并不适用。与此同时,盲源分离算法作为一种基于数据进行计算和处理的方法,具有实时性强、适用范围广、易于实现等特点,逐渐成为了工控领域过