
一种智能盲人辅助眼镜.pdf

是你****盟主

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能盲人辅助眼镜.pdf
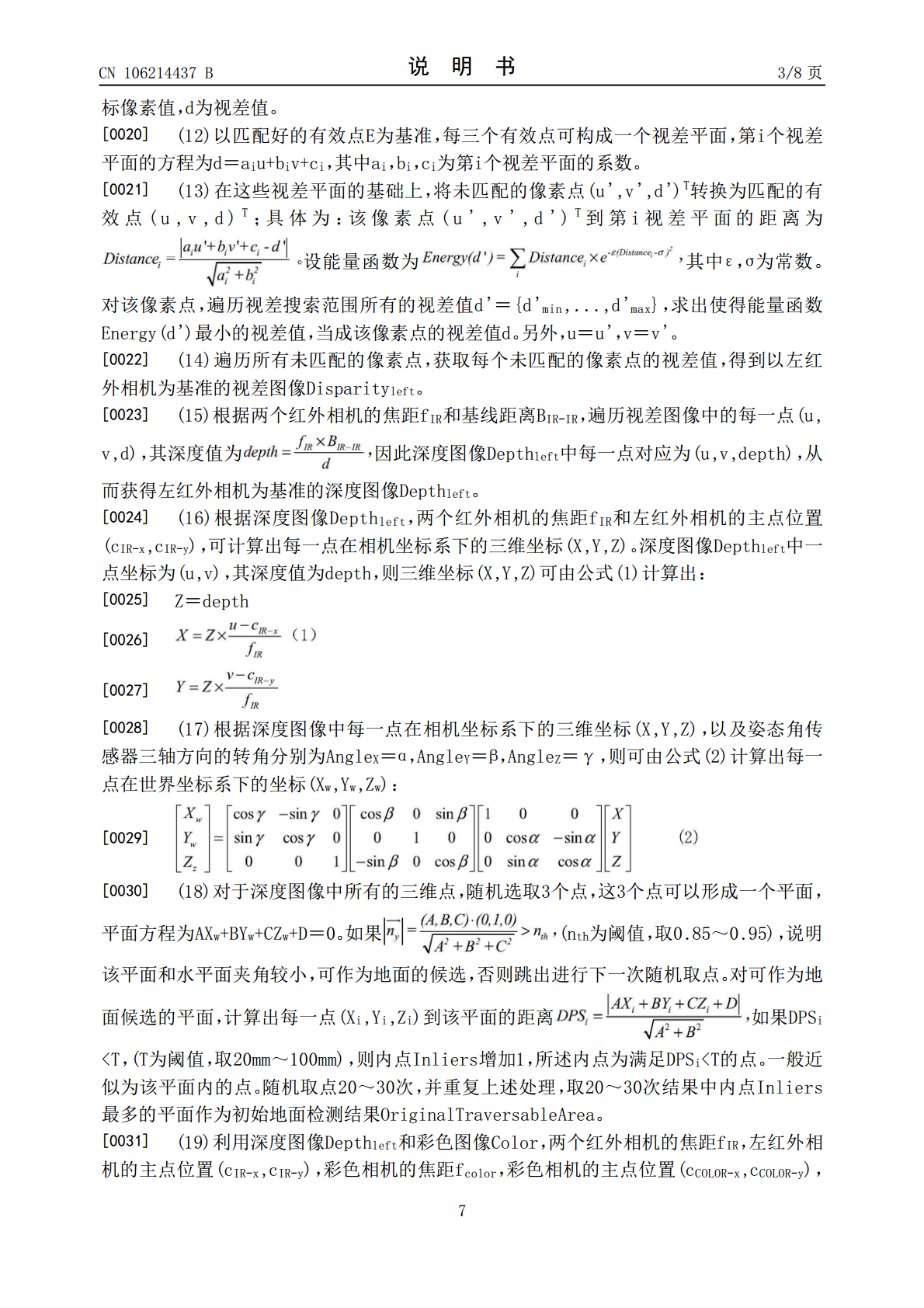
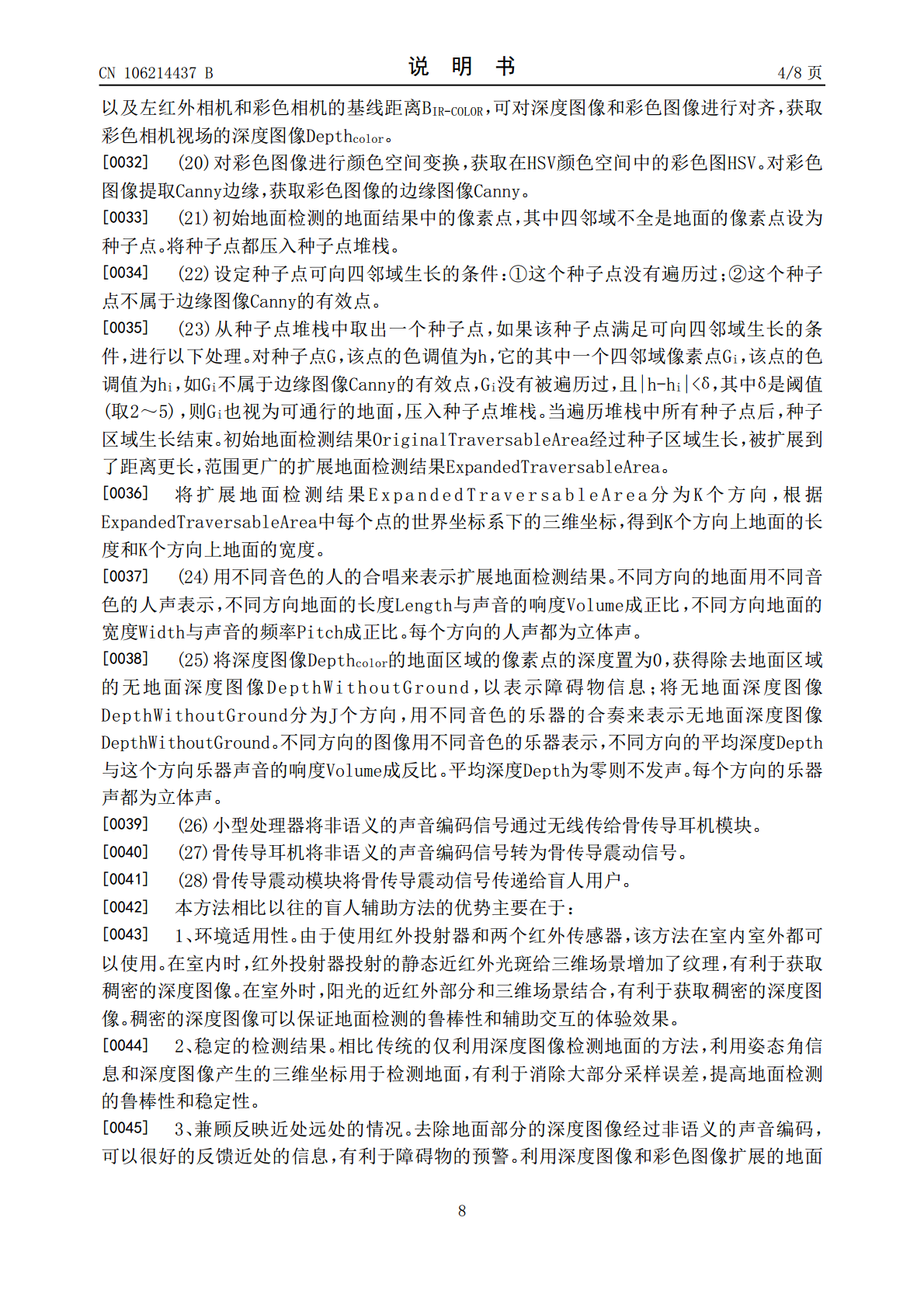
本发明公开了一种新型智能盲人辅助眼镜,该眼镜利用红外投射器投射不可见的近红外静态散斑,利用两个红外相机和一个彩色相机采集图像,利用姿态角传感器获取相机的姿态角信息,对图像中的深度信息和颜色信息、姿态角信息进行处理,检测出图像中的地面和障碍物,最后将检测结果转化为非语义的声音编码,通过骨传导耳机传递给盲人进行辅助,可以很好地满足盲人辅助的要求。
一种智能辅助盲人眼镜系统.pdf
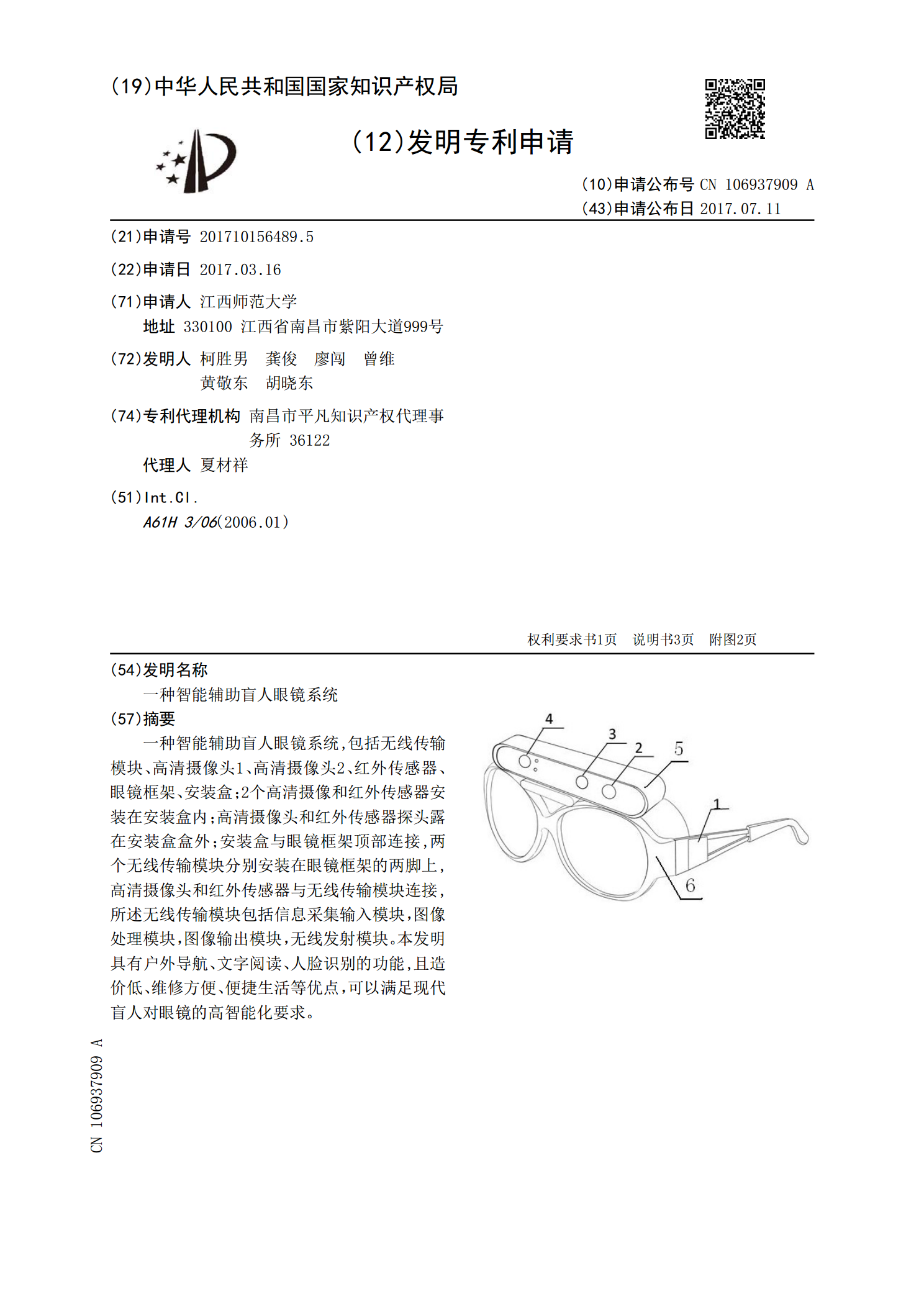
一种智能辅助盲人眼镜系统,包括无线传输模块、高清摄像头1、高清摄像头2、红外传感器、眼镜框架、安装盒;2个高清摄像和红外传感器安装在安装盒内;高清摄像头和红外传感器探头露在安装盒盒外;安装盒与眼镜框架顶部连接,两个无线传输模块分别安装在眼镜框架的两脚上,高清摄像头和红外传感器与无线传输模块连接,所述无线传输模块包括信息采集输入模块,图像处理模块,图像输出模块,无线发射模块。本发明具有户外导航、文字阅读、人脸识别的功能,且造价低、维修方便、便捷生活等优点,可以满足现代盲人对眼镜的高智能化要求。

一种辅助盲人的智能眼镜.pdf
本发明涉及智能穿戴设备领域,具体是一种辅助盲人的智能眼镜,包括镜框、镜腿、识别模块及操作模块,所述镜腿上设有语音模块,所述语音模块用于将识别模块传输的信号通过语音进行播报,所述识别模块预设有多种辅助模式;所述操作模块包含有控制、一键求助、清除缓存及模式切换单元,所述控制单元控制识别模块启闭、拾取图像或视频信息;所述模式切换单元用于切换识别模块的多种辅助模式;本发明的有益效果是:通过控制、一键求助、清除缓存单元对识别模块进行相关处理,减少和降低了对识别模块的性能需求,通过模式切换单元取代服务器的数据处理,降
一种智能盲人眼镜.pdf
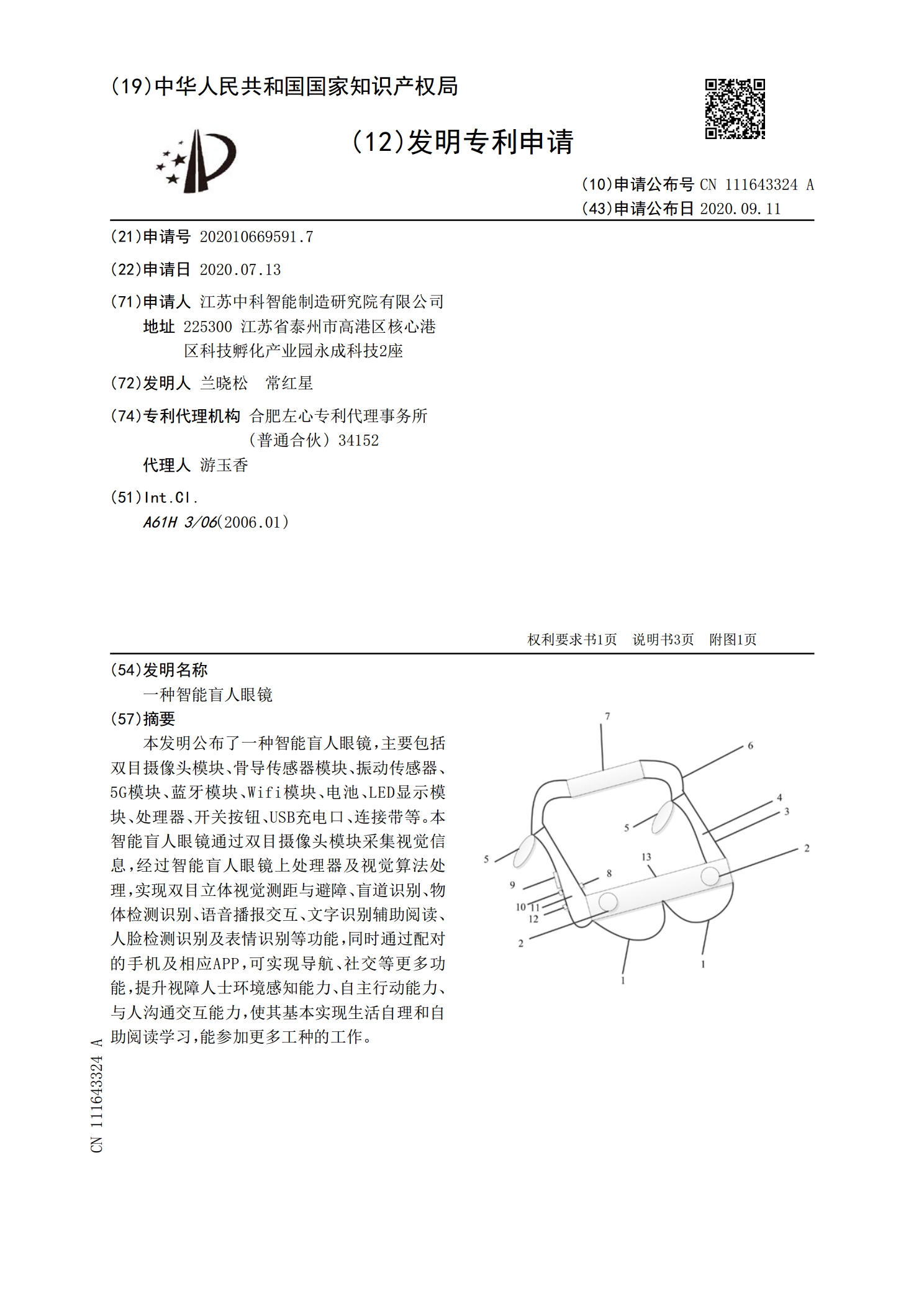
本发明公布了一种智能盲人眼镜,主要包括双目摄像头模块、骨导传感器模块、振动传感器、5G模块、蓝牙模块、Wifi模块、电池、LED显示模块、处理器、开关按钮、USB充电口、连接带等。本智能盲人眼镜通过双目摄像头模块采集视觉信息,经过智能盲人眼镜上处理器及视觉算法处理,实现双目立体视觉测距与避障、盲道识别、物体检测识别、语音播报交互、文字识别辅助阅读、人脸检测识别及表情识别等功能,同时通过配对的手机及相应APP,可实现导航、社交等更多功能,提升视障人士环境感知能力、自主行动能力、与人沟通交互能力,使其基本实现
一种盲人社交智能眼镜.pdf
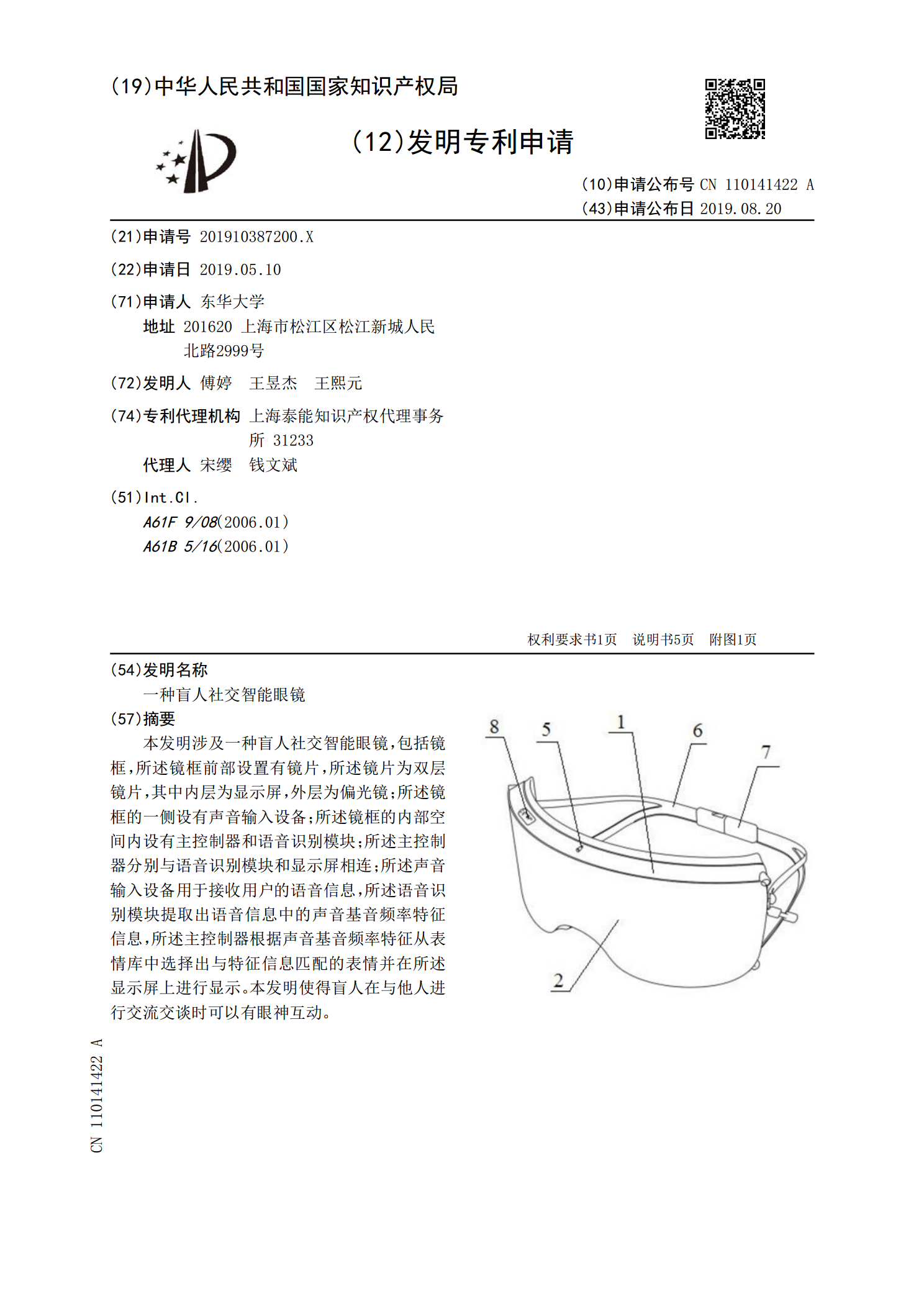
本发明涉及一种盲人社交智能眼镜,包括镜框,所述镜框前部设置有镜片,所述镜片为双层镜片,其中内层为显示屏,外层为偏光镜;所述镜框的一侧设有声音输入设备;所述镜框的内部空间内设有主控制器和语音识别模块;所述主控制器分别与语音识别模块和显示屏相连;所述声音输入设备用于接收用户的语音信息,所述语音识别模块提取出语音信息中的声音基音频率特征信息,所述主控制器根据声音基音频率特征从表情库中选择出与特征信息匹配的表情并在所述显示屏上进行显示。本发明使得盲人在与他人进行交流交谈时可以有眼神互动。