
基于仿射投影自适应的I/Q不平衡抵消算法.pdf

俊凤****bb

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于仿射投影自适应的I/Q不平衡抵消算法.pdf
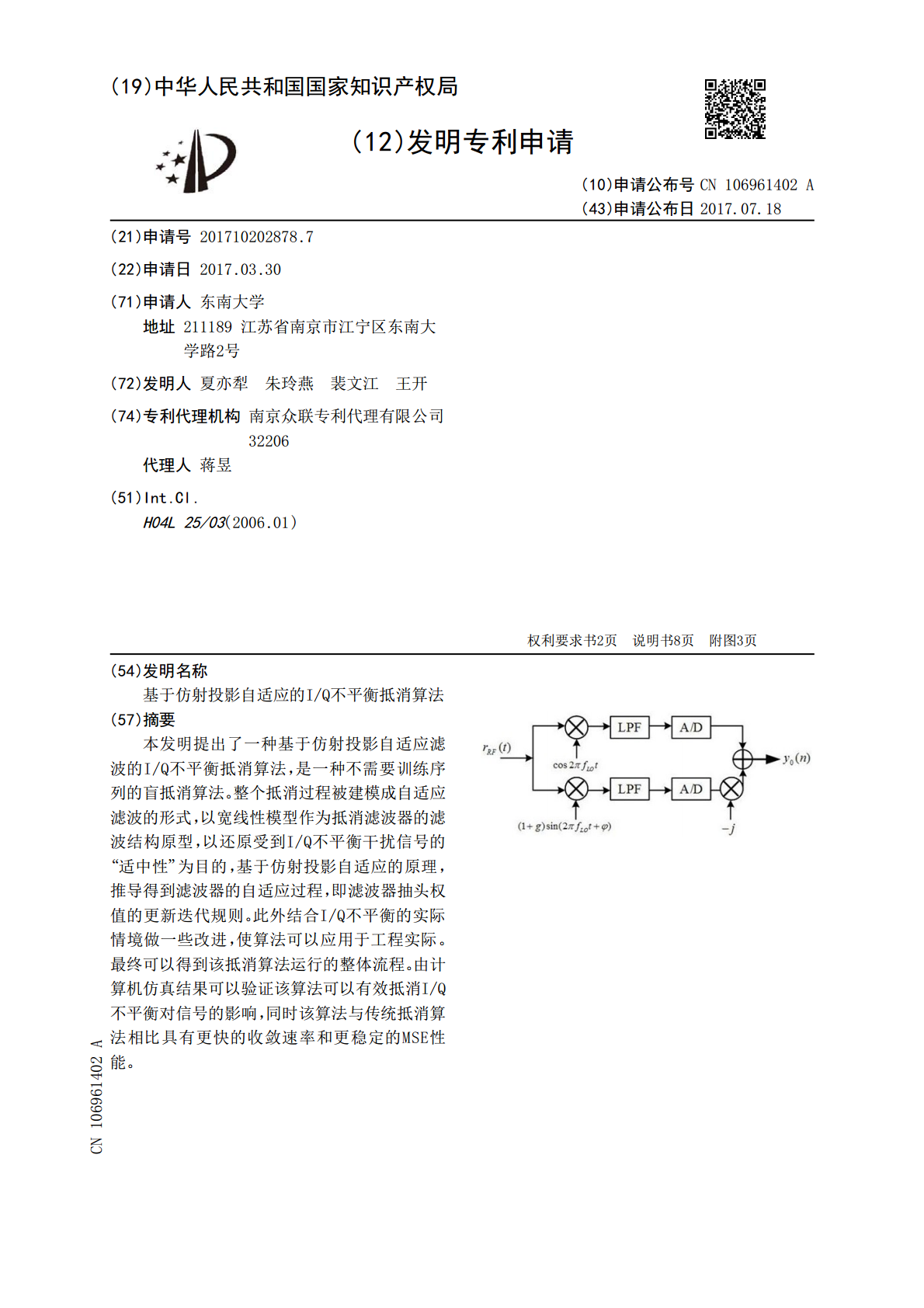
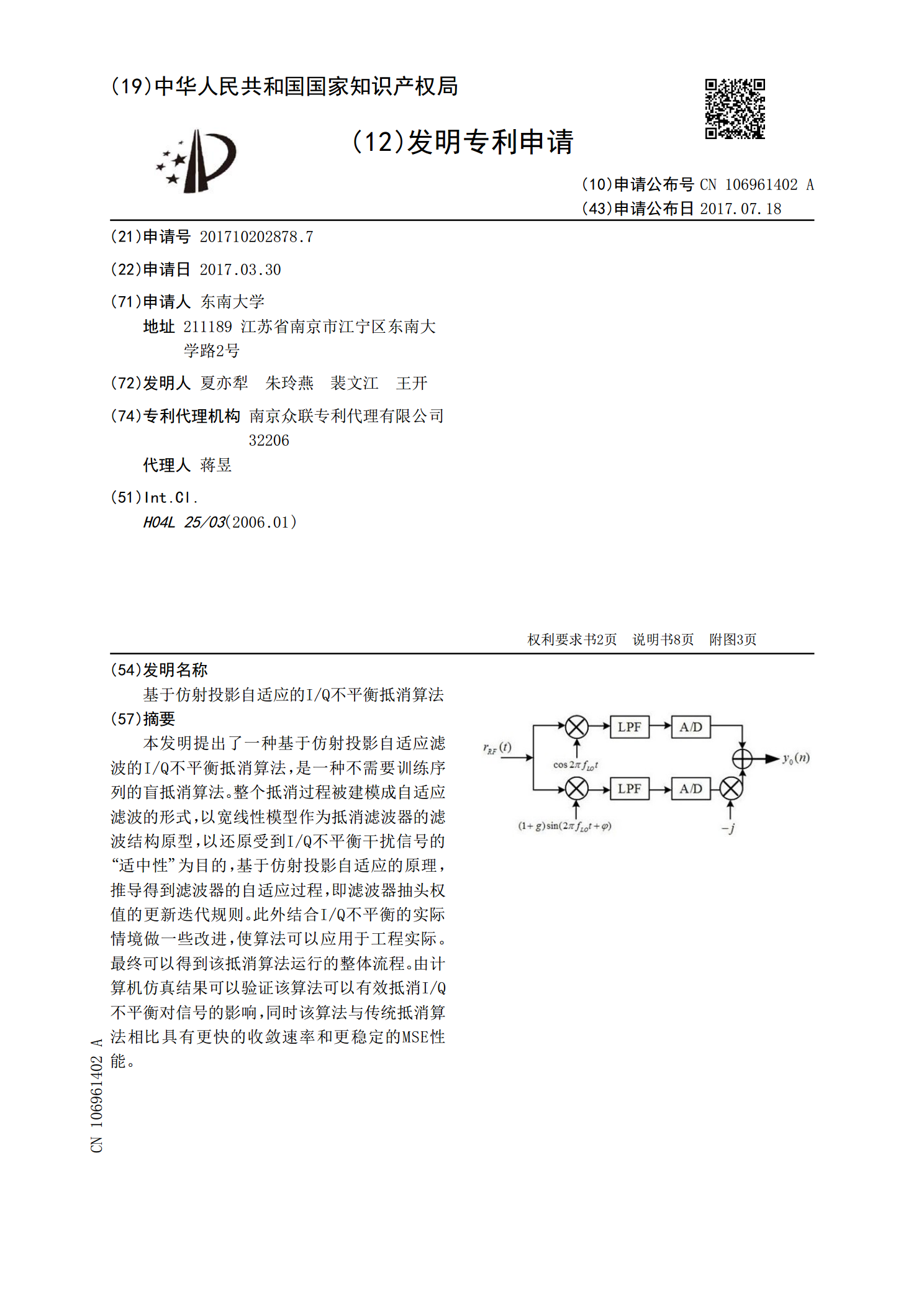
本发明提出了一种基于仿射投影自适应滤波的I/Q不平衡抵消算法,是一种不需要训练序列的盲抵消算法。整个抵消过程被建模成自适应滤波的形式,以宽线性模型作为抵消滤波器的滤波结构原型,以还原受到I/Q不平衡干扰信号的“适中性”为目的,基于仿射投影自适应的原理,推导得到滤波器的自适应过程,即滤波器抽头权值的更新迭代规则。此外结合I/Q不平衡的实际情境做一些改进,使算法可以应用于工程实际。最终可以得到该抵消算法运行的整体流程。由计算机仿真结果可以验证该算法可以有效抵消I/Q不平衡对信号的影响,同时该算法与传统抵消算法

自适应子带仿射投影算法研究的中期报告.docx
自适应子带仿射投影算法研究的中期报告自适应子带仿射投影算法是一种用于图像处理的算法,它可以对图像进行降噪、增强和压缩等处理。本研究给出了该算法的中期报告,主要介绍了算法原理、实现方法和实验结果。以下是详细介绍。一、算法原理自适应子带仿射投影算法是基于子带分解的图像处理算法。它首先将原始图像分解成多个子带,然后对每个子带进行仿射变换,最后再将变换后的子带合成为新的图像。通过这种方法,可以实现图像的降噪、增强和压缩等处理。具体来说,该算法包括以下步骤:1.将原始图像分解成多个子带,可以使用小波变换或者其他子带

基于最大相关熵的簇稀疏仿射投影算法.docx
基于最大相关熵的簇稀疏仿射投影算法基于最大相关熵的簇稀疏仿射投影算法摘要:数据投影是一种常用的数据降维方法,通过保留原始数据的重要信息来减少数据维度。传统的投影方法如主成分分析(PCA)和线性判别分析(LDA)在数据投影中取得了一定的成果,但是在面对高维大规模数据时仍然存在一些问题。本文提出了一种基于最大相关熵的簇稀疏仿射投影算法,通过最大化数据的互信息和最小化数据的冗余信息,实现了高效的数据投影。1.引言数据投影是一种常用的数据降维技术,可以通过将高维数据映射到低维空间中,保留数据的关键信息,减少数据的

一种基于局部迭代的仿射投影算法.docx
一种基于局部迭代的仿射投影算法本论文将介绍一种基于局部迭代的仿射投影算法,该算法主要用于计算一组数据点在一个仿射空间中的投影值。首先,我们需要明确一下仿射空间和投影的概念。仿射空间是指一种在欧几里得空间中的线性空间,它可以用一些仿射变换来描述,包括平移、旋转、缩放等。投影则是指将一个点从一个空间映射到另一个空间的过程,通常用投影矩阵来实现。在实际应用中,我们可能需要将一组数据点投影到一个低维的空间中,以便于数据的可视化和分析。这时候,我们可以使用PCA(主成分分析)等降维方法来计算投影矩阵。但是,对于某些

集员仿射投影算法研究.docx
集员仿射投影算法研究摘要:集员仿射投影是一种提高地图精度和准确性的常见技术,尤其在空间分析和地图绘制方面具有广泛的应用。本文介绍了集员仿射投影的相关概念、算法原理、应用场景以及优缺点,并对其常见的问题进行了分析和探讨。最后,还给出了集员仿射投影技术未来的发展方向和研究展望。关键词:集员仿射投影;算法原理;应用场景;优缺点;问题探讨;发展方向一、引言随着科技的不断进步和现代化的发展,地理信息技术被广泛应用于各种领域,尤其是在空间分析和地图绘制方面,地理信息技术的应用越来越广泛。其中,集员仿射投影技术是一种提