
基于二阶盲辨识的线性结构工作模态参数识别方法及装置.pdf

梅雪****67

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共49页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于二阶盲辨识的线性结构工作模态参数识别方法及装置.pdf
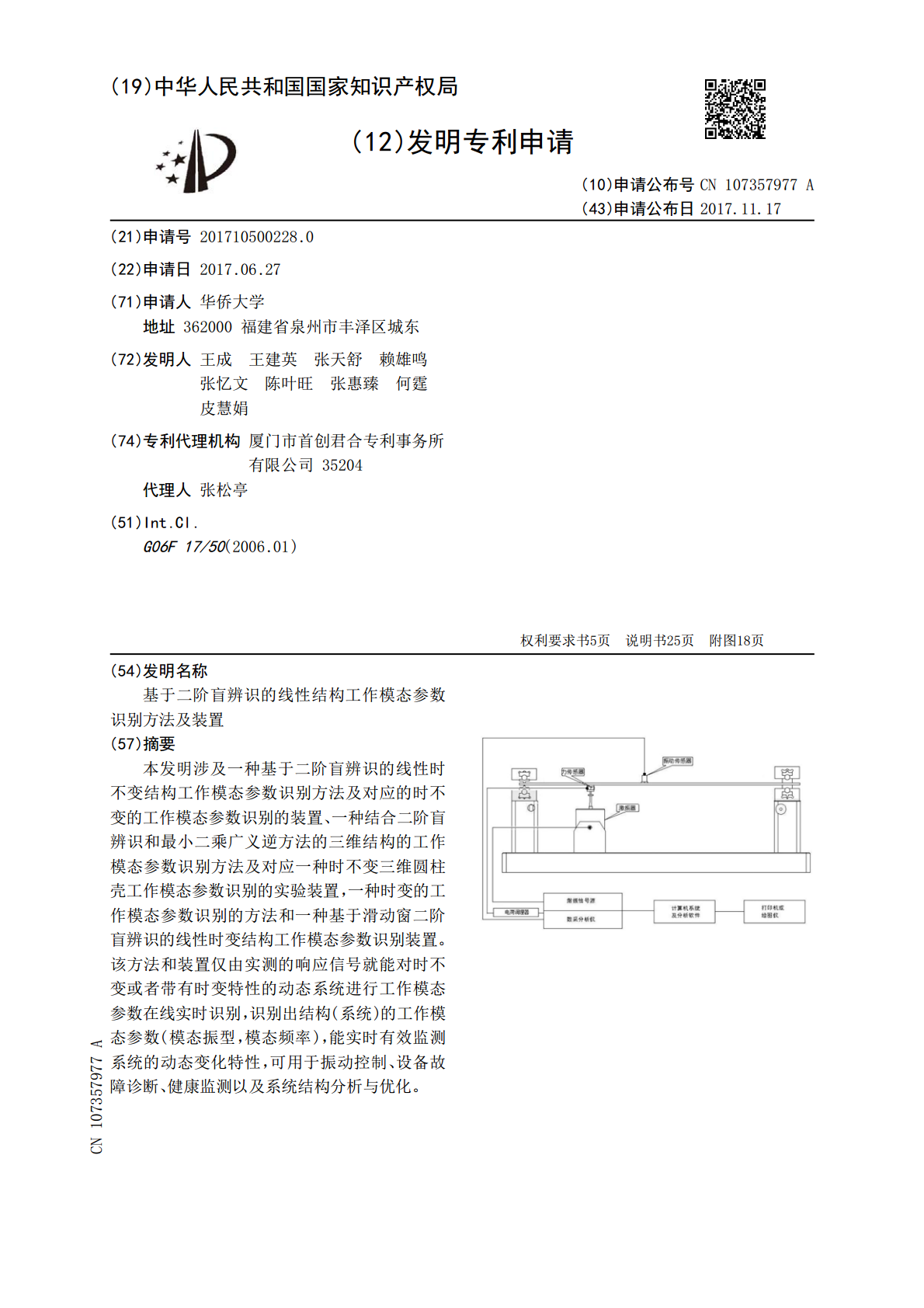
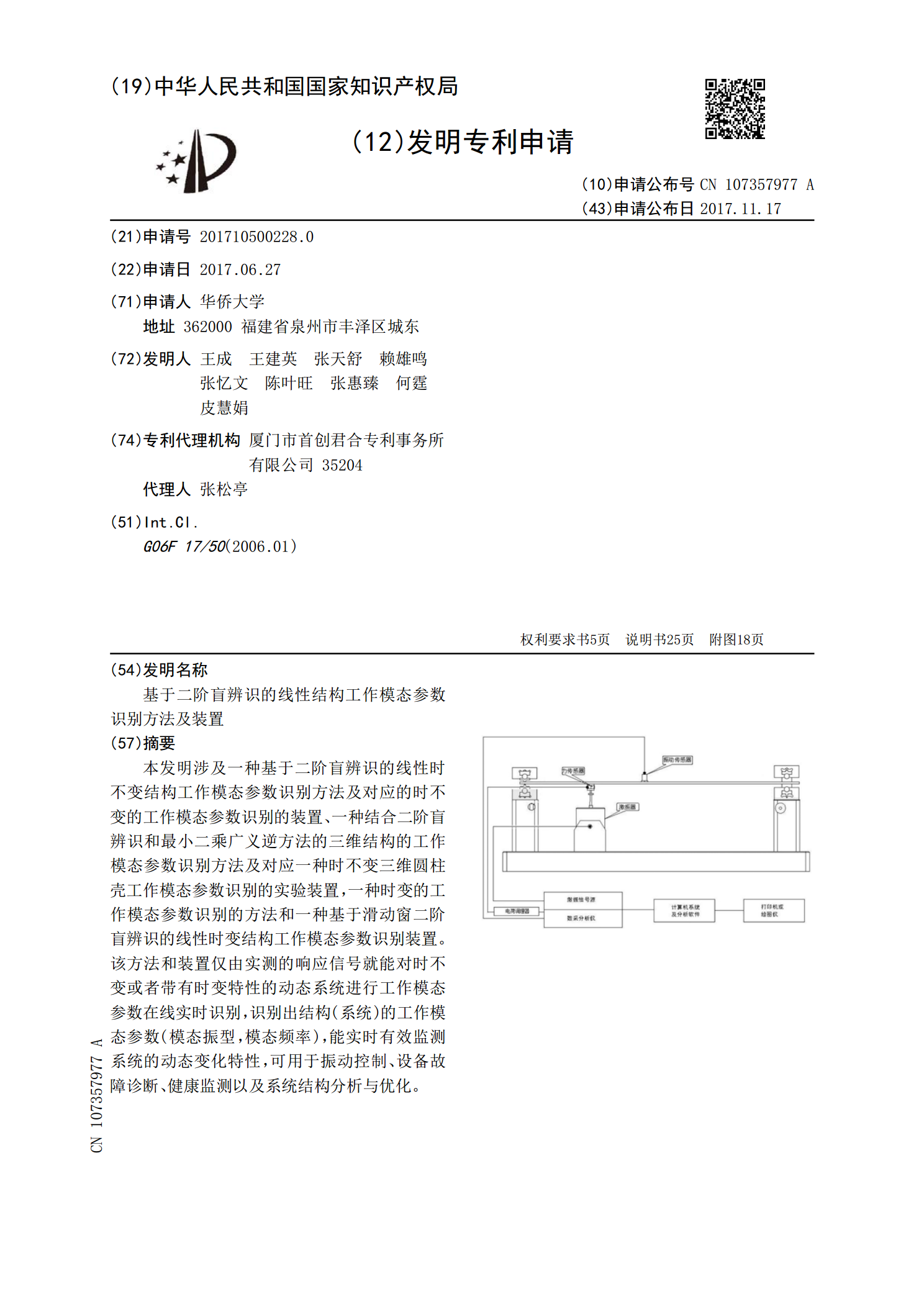
本发明涉及一种基于二阶盲辨识的线性时不变结构工作模态参数识别方法及对应的时不变的工作模态参数识别的装置、一种结合二阶盲辨识和最小二乘广义逆方法的三维结构的工作模态参数识别方法及对应一种时不变三维圆柱壳工作模态参数识别的实验装置,一种时变的工作模态参数识别的方法和一种基于滑动窗二阶盲辨识的线性时变结构工作模态参数识别装置。该方法和装置仅由实测的响应信号就能对时不变或者带有时变特性的动态系统进行工作模态参数在线实时识别,识别出结构(系统)的工作模态参数(模态振型,模态频率),能实时有效监测系统的动态变化特性,

模态参数辨识的频域方法.ppt
前课回顾主要内容引言运动微分方程运动微分方程î运动微分方程静载荷对振动系统的影响单自由度系统自由振动的主要特性固有频率的计算方法静态位移法(单位加速度法)使用静态位移法计算固有频率能量法使用能量法计算固有频率系统势能为:等效质量与等效刚度等效质量与等效刚度等效质量的计算步骤计算弹簧振子系统的等效质量
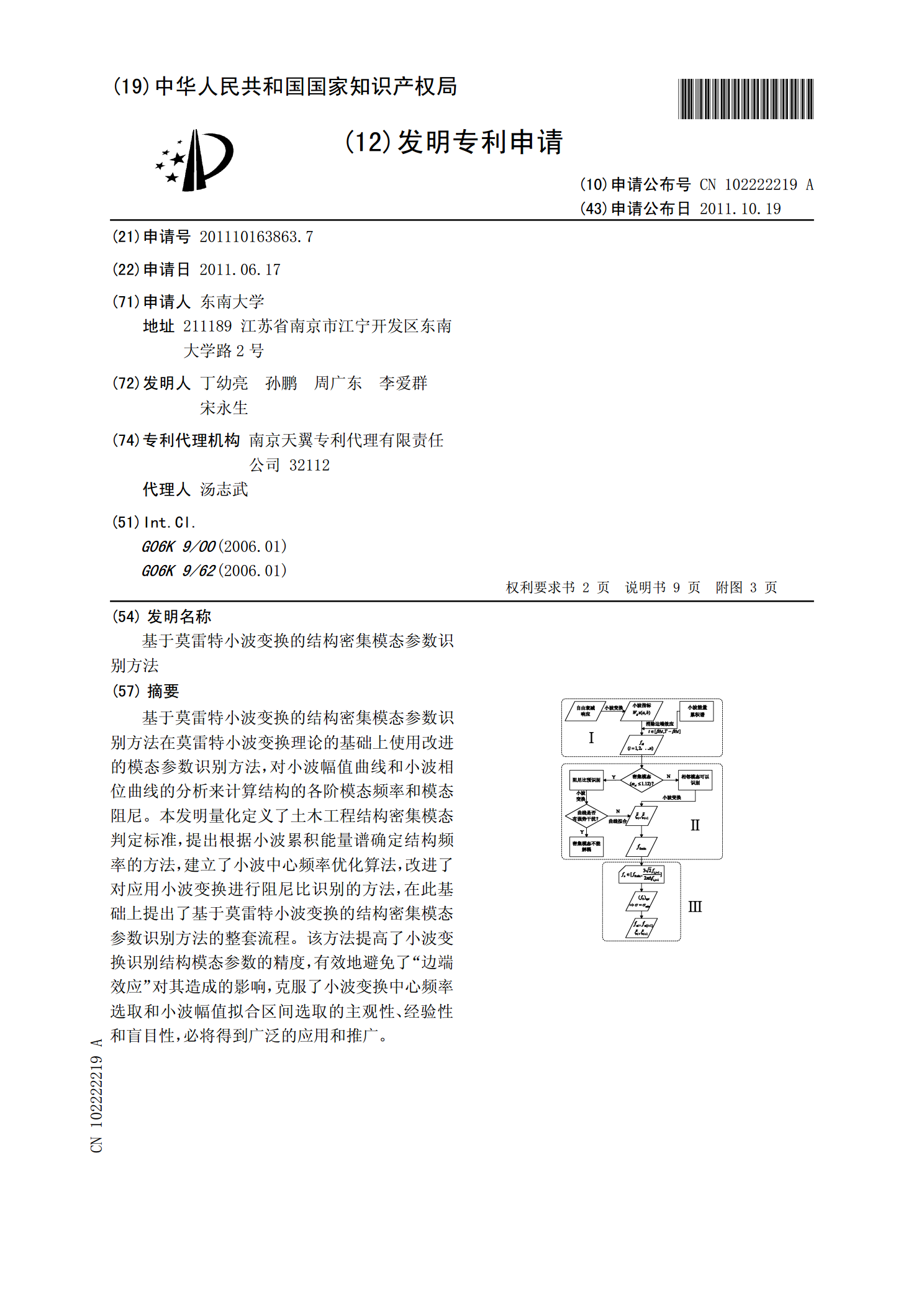
基于莫雷特小波变换的结构密集模态参数识别方法.pdf
基于莫雷特小波变换的结构密集模态参数识别方法在莫雷特小波变换理论的基础上使用改进的模态参数识别方法,对小波幅值曲线和小波相位曲线的分析来计算结构的各阶模态频率和模态阻尼。本发明量化定义了土木工程结构密集模态判定标准,提出根据小波累积能量谱确定结构频率的方法,建立了小波中心频率优化算法,改进了对应用小波变换进行阻尼比识别的方法,在此基础上提出了基于莫雷特小波变换的结构密集模态参数识别方法的整套流程。该方法提高了小波变换识别结构模态参数的精度,有效地避免了“边端效应”对其造成的影响,克服了小波变换中心频率选取
基于变分模态分解和二阶盲辨识的脑电信号伪迹去除方法.pdf
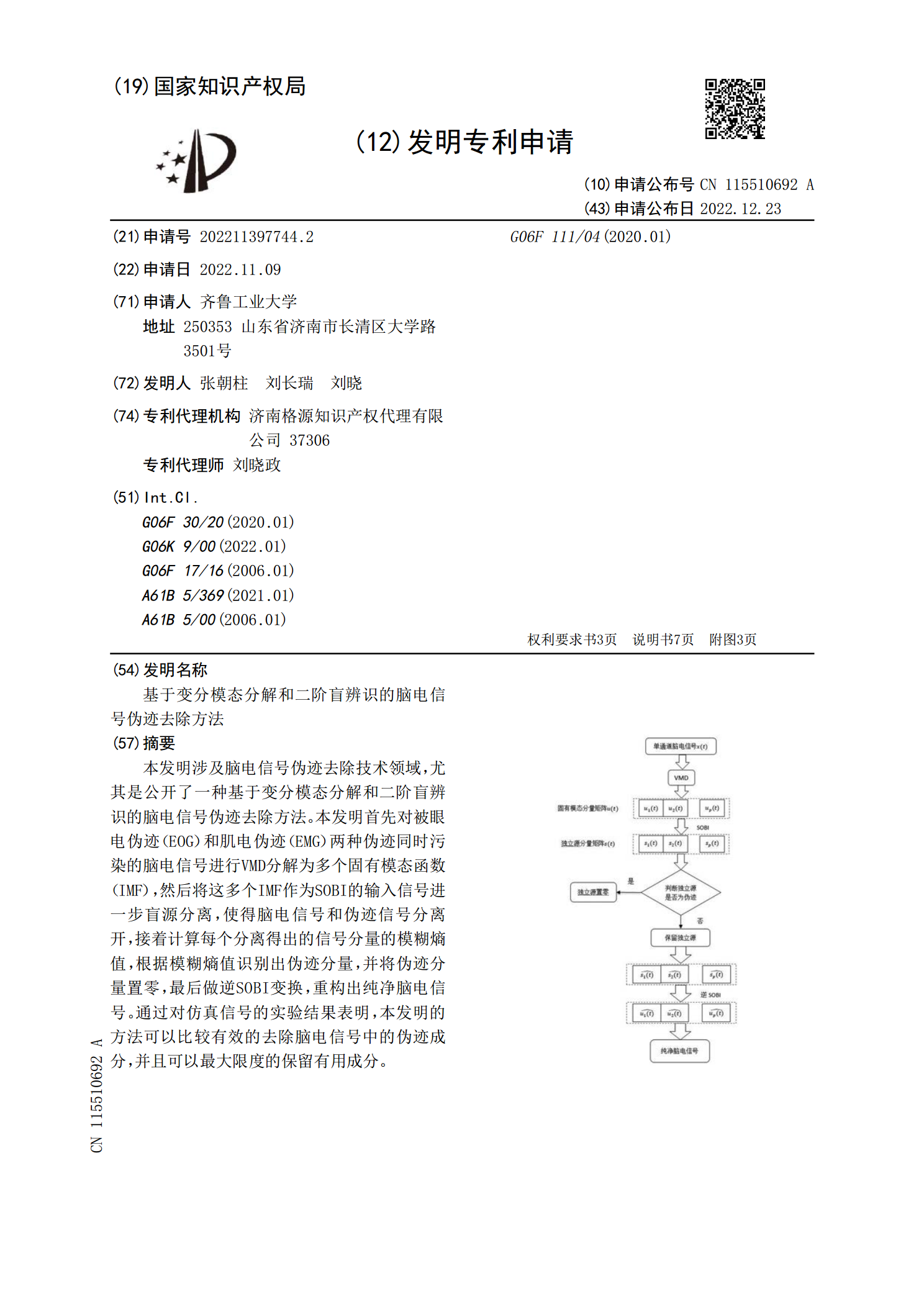
本发明涉及脑电信号伪迹去除技术领域,尤其是公开了一种基于变分模态分解和二阶盲辨识的脑电信号伪迹去除方法。本发明首先对被眼电伪迹(EOG)和肌电伪迹(EMG)两种伪迹同时污染的脑电信号进行VMD分解为多个固有模态函数(IMF),然后将这多个IMF作为SOBI的输入信号进一步盲源分离,使得脑电信号和伪迹信号分离开,接着计算每个分离得出的信号分量的模糊熵值,根据模糊熵值识别出伪迹分量,并将伪迹分量置零,最后做逆SOBI变换,重构出纯净脑电信号。通过对仿真信号的实验结果表明,本发明的方法可以比较有效的去除脑电信号

基于粒子群算法的非线性系统参数辨识.ppt
8.12基于粒子群算法的非线性系统参数辨识8.12.1辨识非线性静态模型8.12.1辨识非线性静态模型8.12.1辨识非线性静态模型8.12.1辨识非线性静态模型8.12.1辨识非线性静态模型8.12.1辨识非线性静态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.2辨识非线性动态模型8.12.3基于粒子群算法的VTOL飞行器参数辨