
基于双目测距的汽车侧面图像检测方法及系统.pdf

曾琪****是我

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双目测距的汽车侧面图像检测方法及系统.pdf
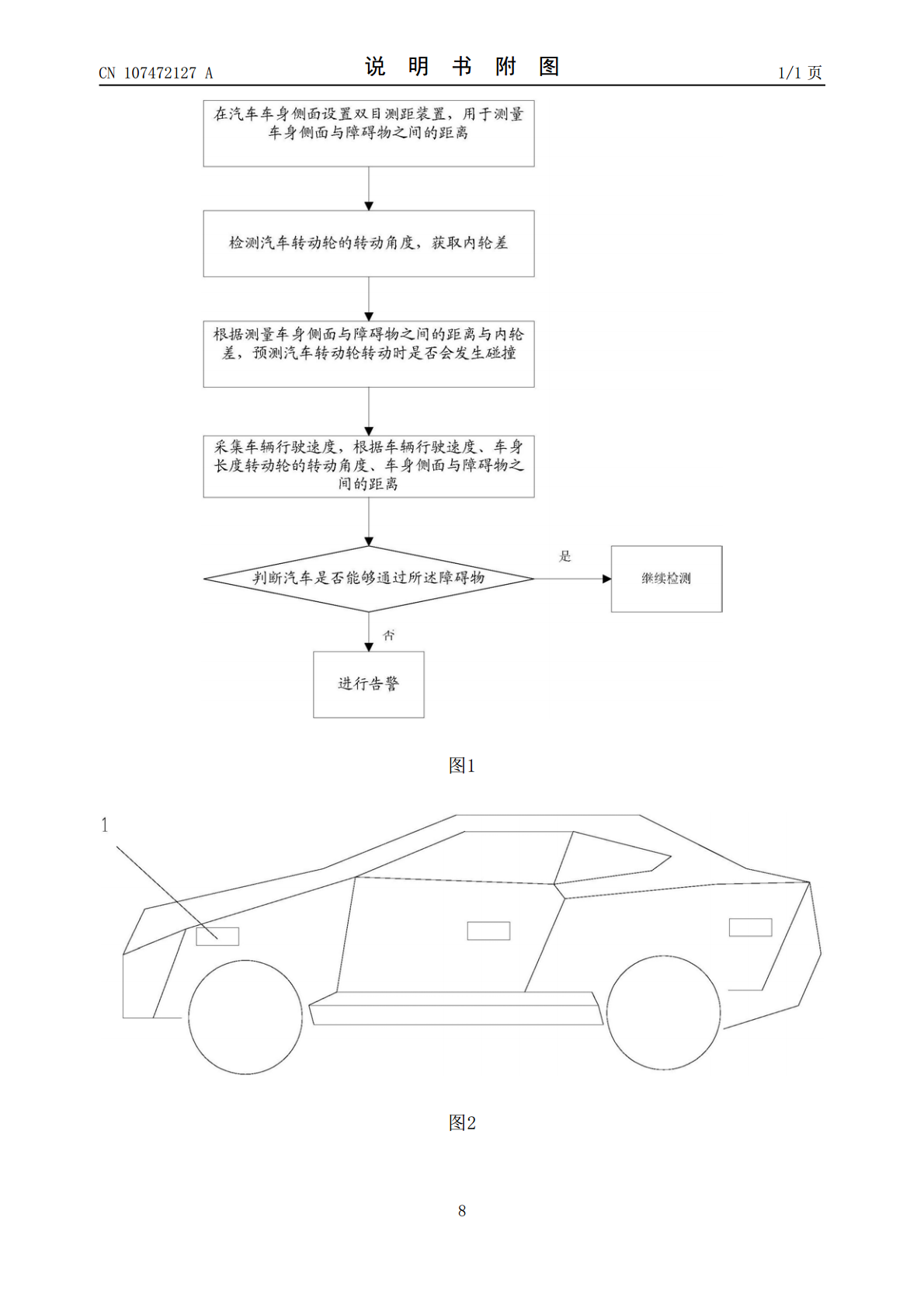
本发明提供的基于双目测距的汽车侧面图像检测方法及系统,其方法包括在汽车车身侧面设置双目测距装置,用于测量车身侧面与障碍物之间的距离,检测汽车转动轮的转动角度,获取内轮差,根据测量车身侧面与障碍物之间的距离与内轮差,预测汽车转动轮转动时是否会发生碰撞;本发明中可以在慢速的情况下,汽车在距离障碍物非常近时,通过汽车车身侧面设置双目测距装置和汽车转动轮的转动角度,测量车身侧面与障碍物之间的距离并获取内轮差,预测汽车转动轮转动时是否会发生碰撞,本发明可以对驾驶员的操作做出避免发生碰撞的操作提示,具有结构简单、安全
基于双目测距和图像分割对输电线舞动的检测方法.pdf
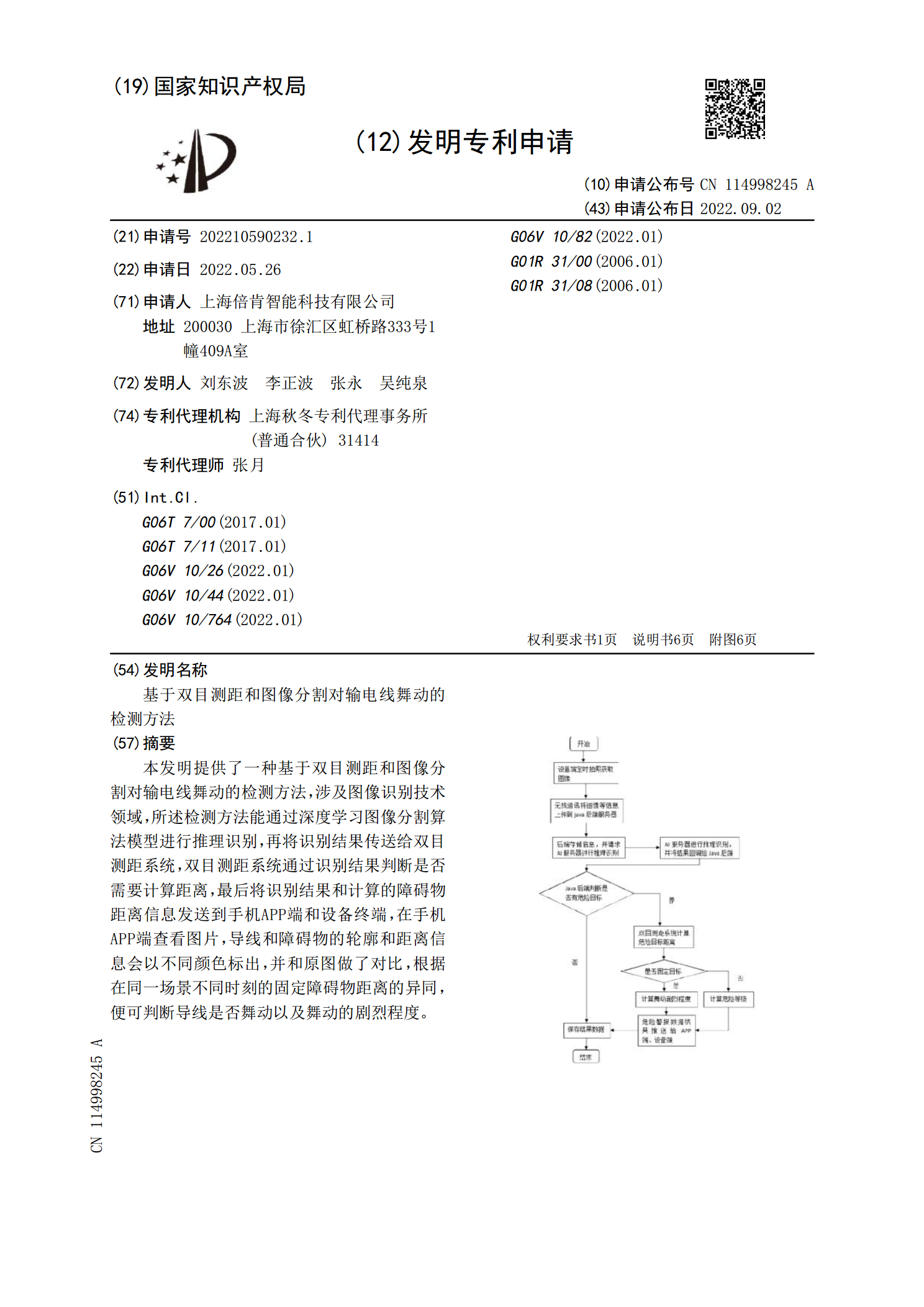
本发明提供了一种基于双目测距和图像分割对输电线舞动的检测方法,涉及图像识别技术领域,所述检测方法能通过深度学习图像分割算法模型进行推理识别,再将识别结果传送给双目测距系统,双目测距系统通过识别结果判断是否需要计算距离,最后将识别结果和计算的障碍物距离信息发送到手机APP端和设备终端,在手机APP端查看图片,导线和障碍物的轮廓和距离信息会以不同颜色标出,并和原图做了对比,根据在同一场景不同时刻的固定障碍物距离的异同,便可判断导线是否舞动以及舞动的剧烈程度。

基于图像分割的双目无源测距.docx
基于图像分割的双目无源测距基于图像分割的双目无源测距摘要:双目无源测距是一种基于计算机视觉技术的测距方法,通过对从双目摄像头获取的图像进行分割和匹配,可以实现对目标物体的距离测量。本论文将重点研究基于图像分割的双目无源测距方法,并通过实验证明了该方法的有效性和可行性。1.引言双目摄像头是一种常用的测距器件,它通过两个摄像头模拟人眼的双目观测,从而获得更准确的距离信息。但传统的双目测距方法需要利用红外或激光进行主动测量,不适用于某些应用场景。因此,基于图像分割的双目无源测距方法成为研究的热点之一。2.相关工

基于FPGA的汽车双目视觉测距系统研究的任务书.docx
基于FPGA的汽车双目视觉测距系统研究的任务书一、课题背景随着智能技术和自动化技术的发展,汽车已经从传统的机械设备向数字化和智能化技术方向发展。在这个方向上,汽车双目视觉技术被广泛应用于测距、人脸识别、安全保障等多个领域。双目视觉技术是指在仪器设备上设置两个相机,通过比对两个图像的差异,获取目标物体的距离和空间位置。双目视觉系统在汽车领域中,可以用于路标识别、障碍物识别和车道线检测等多种任务,其作用在于通过测量距离和大小,在车辆行驶过程中提供给车辆自动驾驶系统更为准确的空间判断信息,从而提高车辆行驶的安全

双目测距系统及标定方法研究.docx
双目测距系统及标定方法研究双目测距系统及标定方法研究摘要:双目测距系统是一种常见的三维视觉测量系统,利用双目视觉的原理实现对目标物体的距离测量。本论文主要研究了双目测距系统的原理、结构及常用标定方法。通过对双目相机的标定,能够有效提高双目测距系统的测量精度和稳定性,为后续的三维重建和视觉导航等应用提供准确的图像测距数据。关键词:双目测距,双目视觉原理,标定方法1.引言随着计算机视觉和机器视觉技术的快速发展,人们对于在机器和智能设备中加入三维视觉感知的需求越来越大。双目测距系统因其简单的原理和较低的成本,成