
一种商场盲人智能导购系统及方法.pdf

一条****彩妍


1/9
2/9
3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种商场盲人智能导购系统及方法.pdf
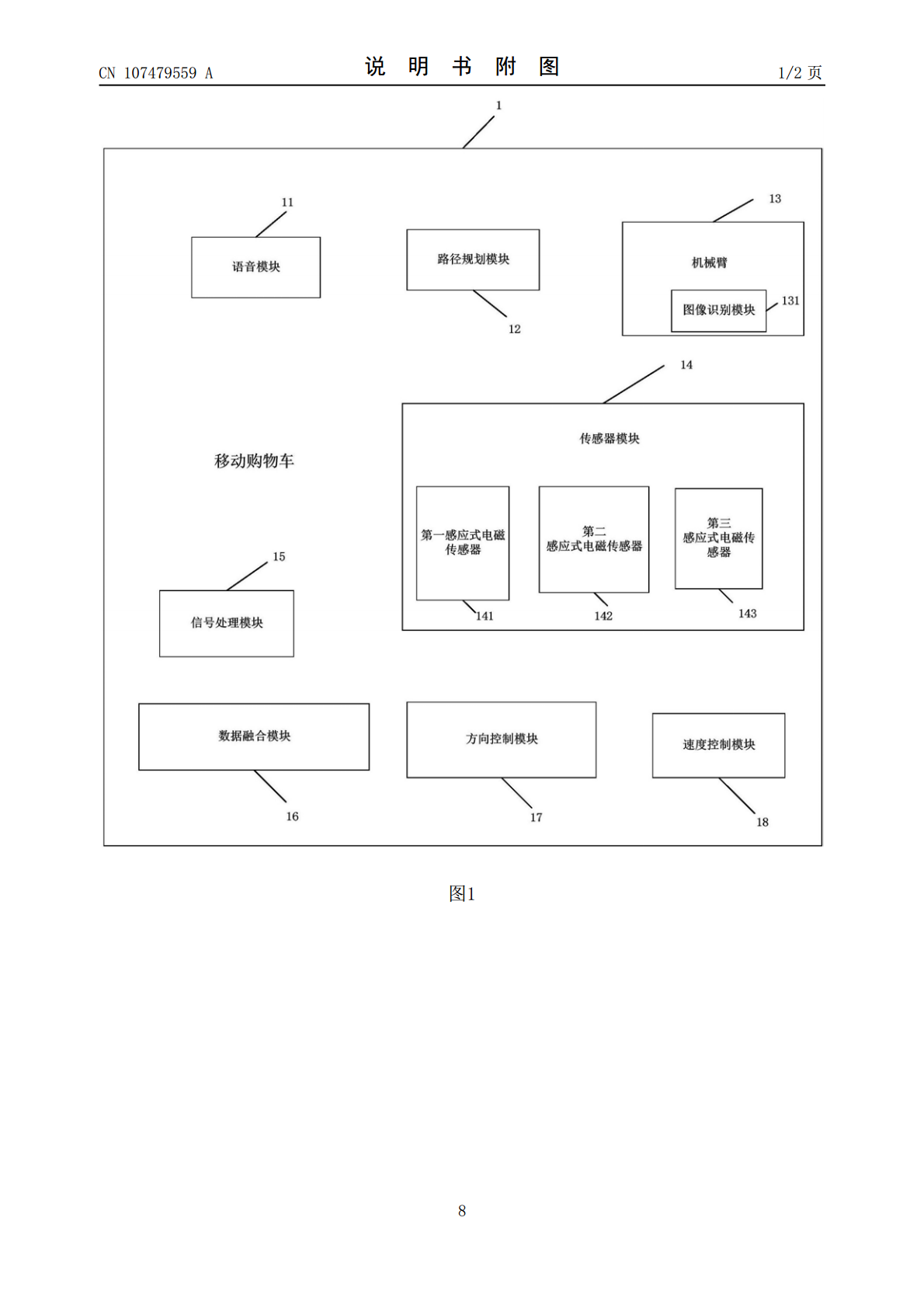
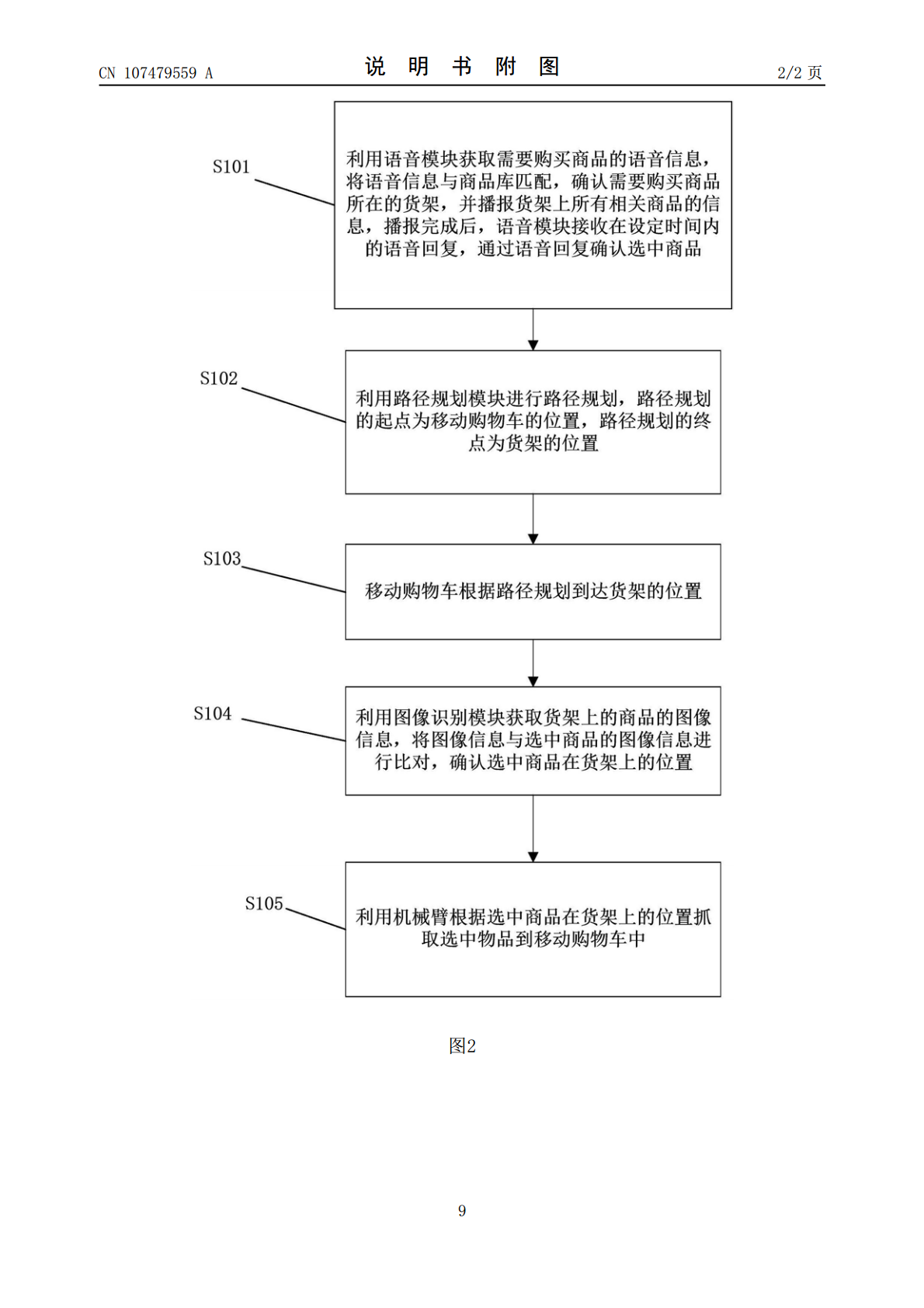
本发明提供一种商场盲人智能导购系统,包括移动购物车,所述移动购物车上设有语音模块、路径规划模块和机械臂,所述机械臂上设有图像识别模块。本发明还提供一种商场盲人智能导购方法,步骤如下:获取需要购买商品的语音信息,确认所述需要购买商品所在的货架,而后播报所述货架上所有相关商品的信息,播报完成后,根据语音回复确认选中商品;以移动购物车的位置为起点、以货架的位置为终点进行路径规划;移动购物车根据所述路径规划到达货架的位置;利用图像识别模块获取货架上的商品的图像信息,确认所述选中商品在货架上的位置;利用机械臂抓取选

一种基于人工智能的商场智能导购方法及系统.pdf
本发明公开了一种基于人工智能的商场智能导购方法及系统,属于数据挖掘技术领域。本发明的基于人工智能的商场智能导购方法,包括数据分析和路线规划,数据分析时,通过用户在电商平台的行为获得用户的购物习惯和商品偏好的数据,结合数据分析结果与商场店铺信息为用户规划合适的路线。该发明的基于人工智能的商场智能导购方法能够对用户的购物兴趣分析准确,推荐的商场店铺合适,有利于用户买到满意的商品,并为商场增加营收,具有很好的推广应用价值。

一种超市用盲人智能导购系统.pdf
本发明公开了一种超市用盲人智能导购系统,包括有:货架、台板、商品、具有车轮的购物推车、其特征在于还包括语音播报器、盲道、磁性开关;所述货架上设有四层台板,所述台板的前侧安装有语音播报器;所述商品放置于台板的顶部;所述货架的前侧路面上铺设有盲道;所述盲道上设有磁性开关,所述磁性开关与语音播报器电性连接;所述购物推车与盲道配套使用,所述购物推车下部设有磁性材料。本发明通过在盲道上设置磁性开关,并将磁性开关与语音播报器连接,盲人朋友只需推着带磁性的购物车经过,即可知晓商品信息,实现了盲人单独自主购物梦想。本发明

一种用于商场的智能导购系统.pdf
本发明公开一种用于商场的智能导购系统,包括:移动装置、柜体结构、触摸显示屏;所述柜体结构安装于所述移动装置上,所述触摸显示屏安装于所述柜体结构上;所述移动装置包括承载板及设于所述承载板上的移动定位轮,所述柜体结构设于所述承载板上;所述柜体结构包括收容箱及箱门,所述收容箱为具有一开口的中空箱体结构,所述箱门设于所述收容箱的开口端。本发明的一种用于商场的智能导购系统,通过设置移动装置、柜体结构、触摸显示屏,并对各个部件的结构进行优化设计,既方便移动,还方便固定,进而提升整体的性能。

一种智能盲人阅读方法及智能盲人阅读器系统.pdf
本发明公开了一种智能盲人阅读方法及智能盲人阅读器系统,通过图像采集模块采集文本的图像信息,由USB分流模块通过通信模块将文本的图像信息上传至云服务器;云服务器采集的图像信息进行预处理、文字分割,文字识别,并将识别结果以文本格式发送给USB分流模块;USB分流模块再发送至中央控制模块,中央控制模块通过语音播报模块的语音处理单元将文本格式的识别结果转化成语音信息,送蓝牙单元,通过蓝牙单元的耳机或者喇叭,将语音播报给阅读者。与现有技术相比,具有实现印刷体汉字中常用的八种字体的识别,实现手写汉字体识别,阅读效率高