
一种基于改进粒子群优化BP神经网络的盲信道均衡方法.pdf

盼易****君a

1/10
2/10

3/10
4/10

5/10
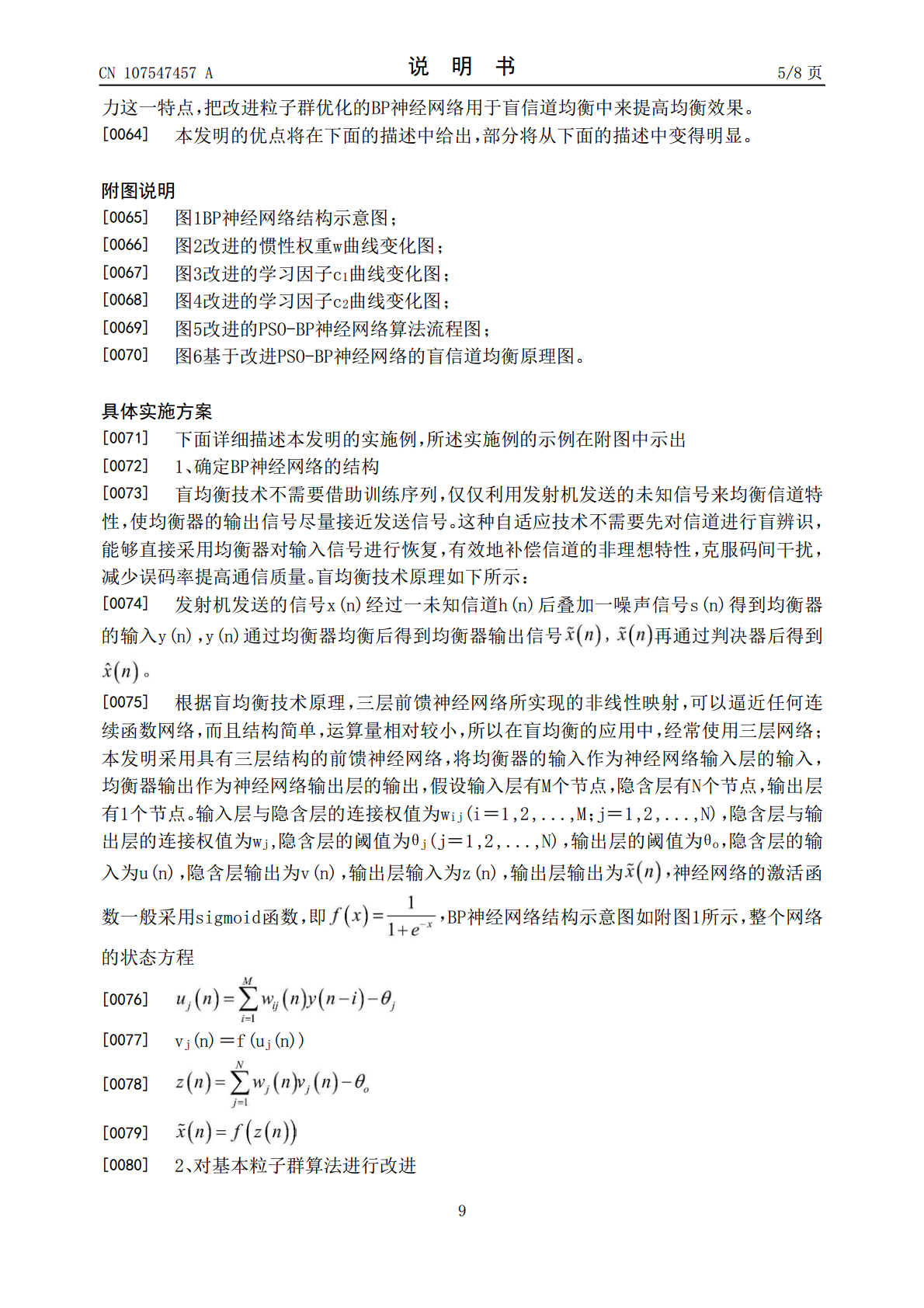
6/10

7/10
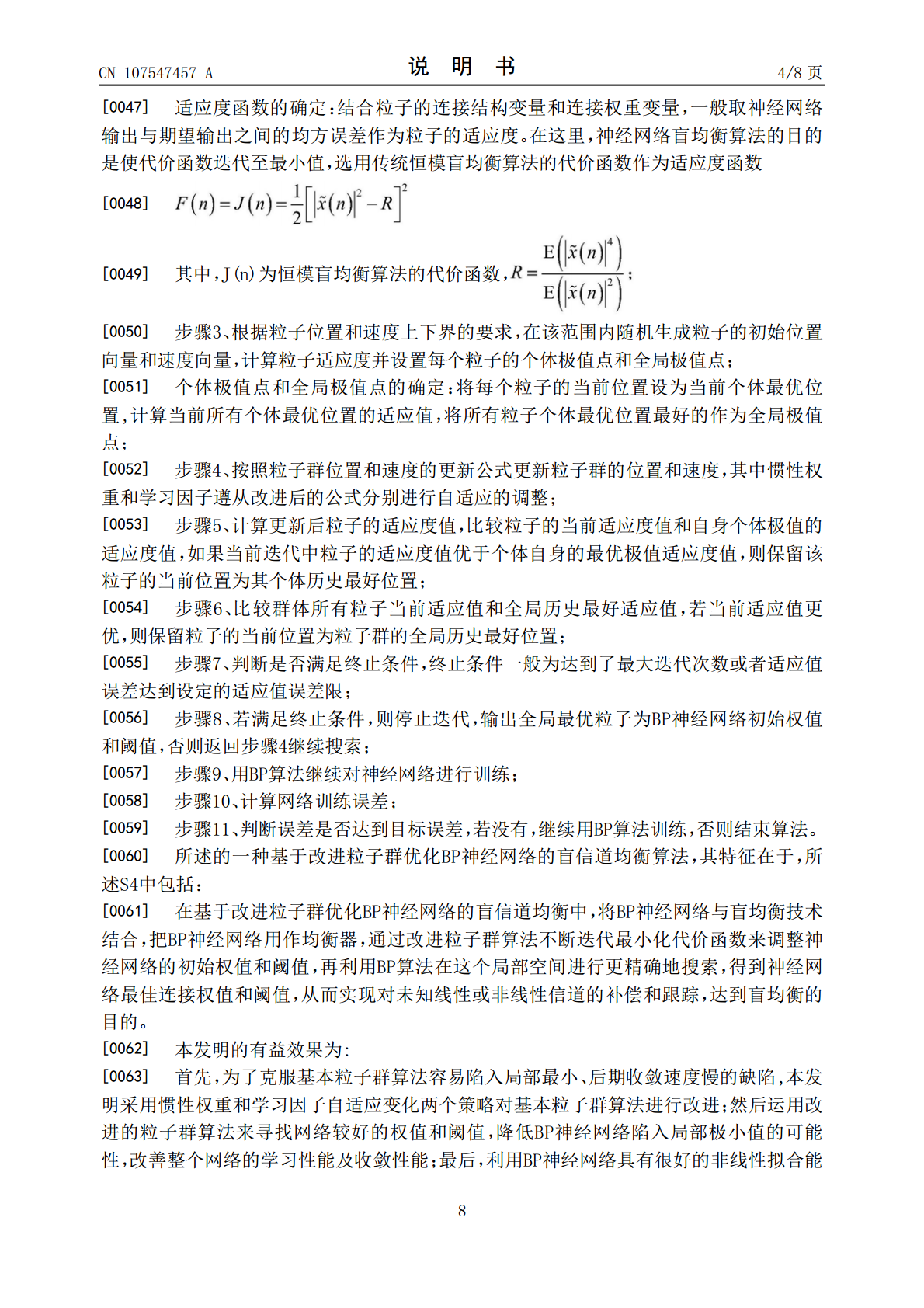
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于改进粒子群优化BP神经网络的盲信道均衡方法.pdf
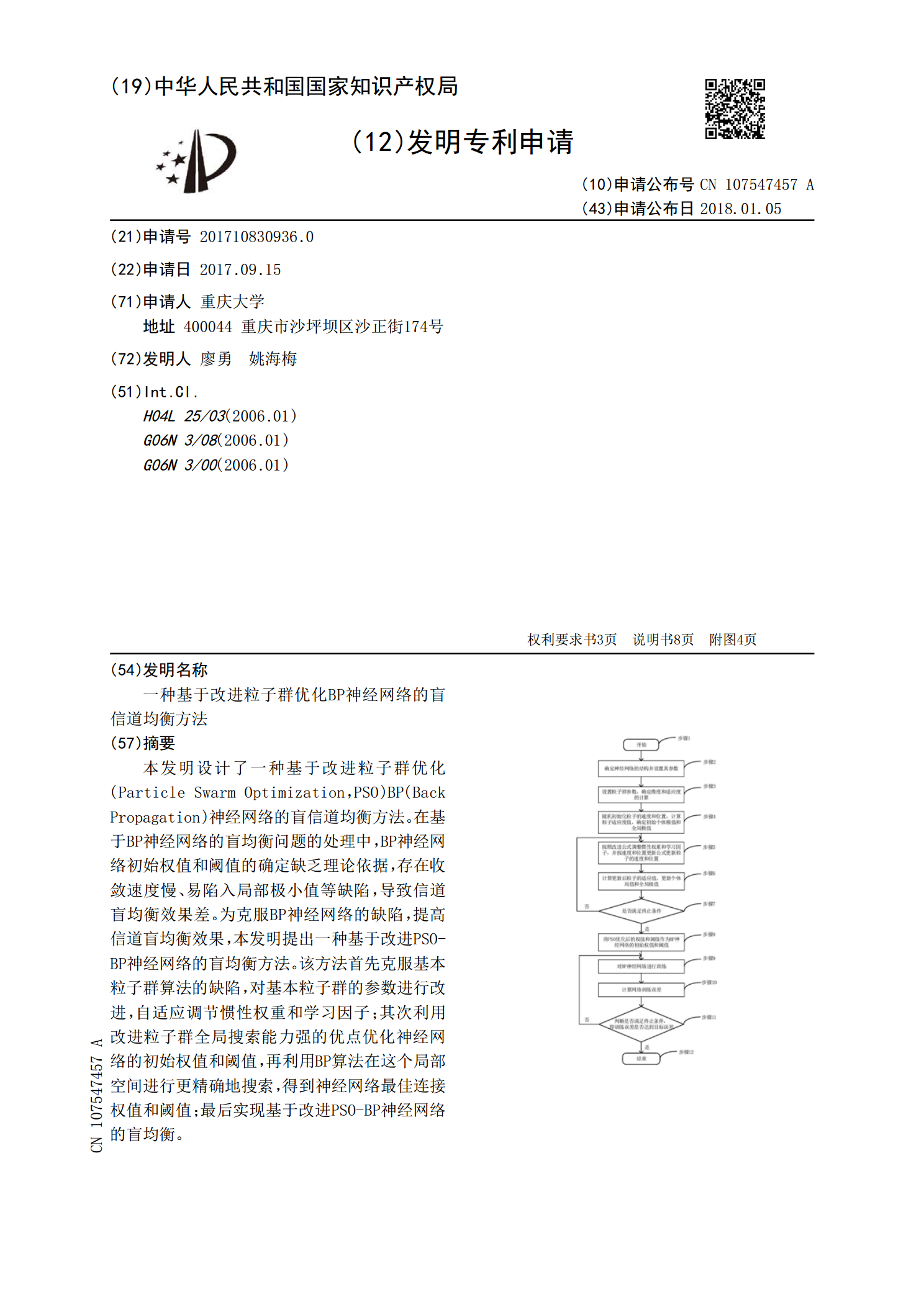
本发明设计了一种基于改进粒子群优化(ParticleSwarmOptimization,PSO)BP(BackPropagation)神经网络的盲信道均衡方法。在基于BP神经网络的盲均衡问题的处理中,BP神经网络初始权值和阈值的确定缺乏理论依据,存在收敛速度慢、易陷入局部极小值等缺陷,导致信道盲均衡效果差。为克服BP神经网络的缺陷,提高信道盲均衡效果,本发明提出一种基于改进PSO‑BP神经网络的盲均衡方法。该方法首先克服基本粒子群算法的缺陷,对基本粒子群的参数进行改进,自适应调节惯性权重和学习因子;

基于BP神经网络的盲均衡算法.docx
基于BP神经网络的盲均衡算法基于BP神经网络的盲均衡算法摘要:盲均衡是数字通信领域中一个重要的技术问题,其目的是在不知道输入信号的统计特性的情况下,通过合理的算法对输入信号进行均衡处理,提高系统的性能。本文提出了一种基于BP神经网络的盲均衡算法,通过训练神经网络,使其具备自适应的能力,并根据输入信号的统计特性对神经网络的结构和参数进行合理的选择。实验结果表明,该算法能够有效地提供良好的均衡效果,并在高斯背景噪声的干扰下具备较好的抗干扰能力。引言:在数字通信系统中,信号传输有时会面临来自信道干扰和噪声的影响

基于粒子群优化的正交小波盲均衡方法.pdf
本发明公布了一种基于粒子群优化的正交小波盲均衡方法,该方法将发射信号a(k)经过脉冲响应信道h(k)得到信道输出信号x(k);由信道噪声n(k)和x(k)得到正交小波变换(WT)输入信号y(k);将y(k)经过WT得到输出信号R(k);将y(k)作为粒子群优化算法(PSO)的输入,并随机初始化一组权向量,每个粒子一一对应各组权向量,由正交小波常数模盲均衡方法(WT-CMA)的代价函数确定PSO的适应度函数,当适应度值最大时,找到种群中最优的位置向量,并将其作为WT-CMA的初始化权向量W(k)。由R(k)
基于改进粒子群优化的分段盲信号分离方法.pdf
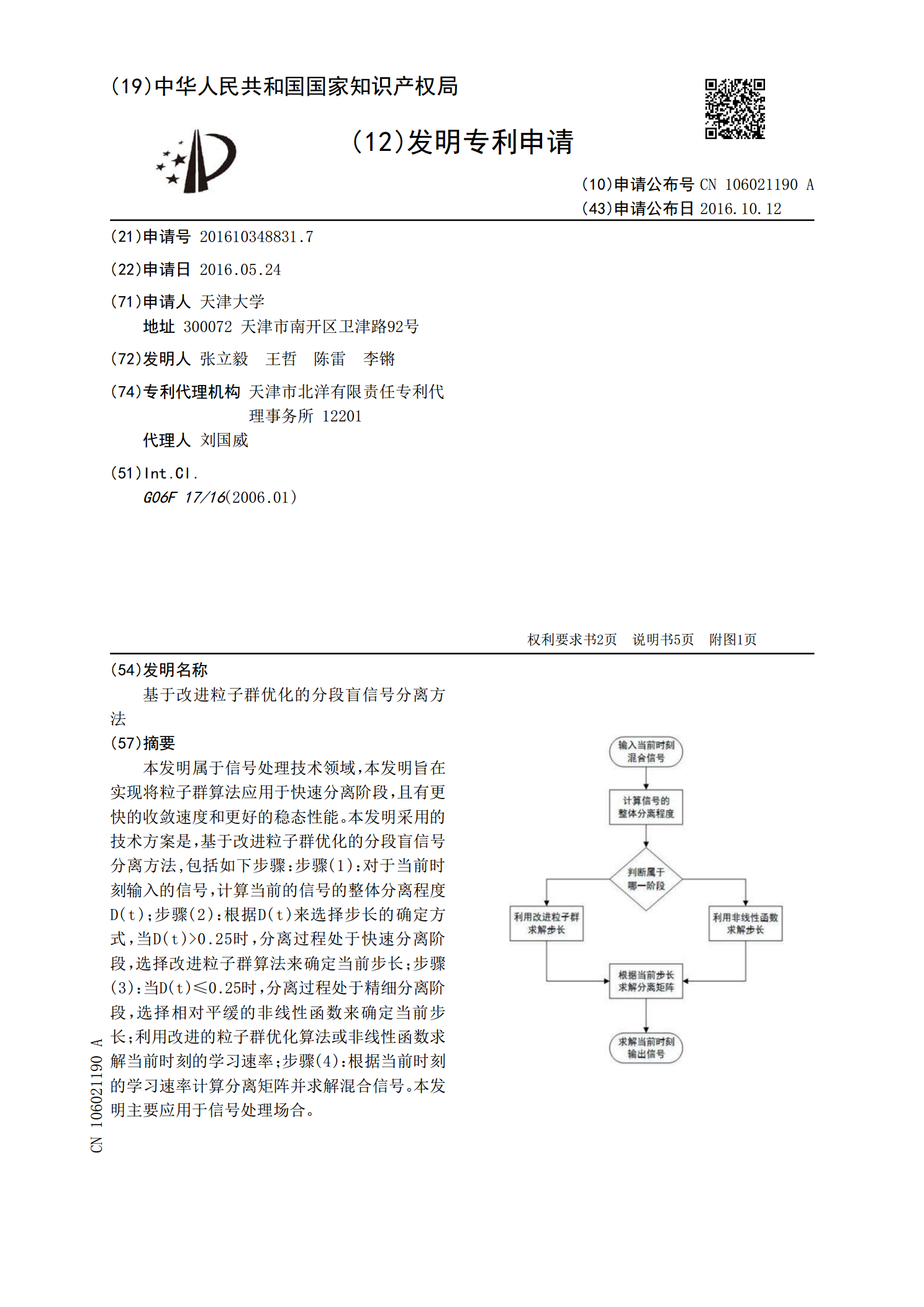
本发明属于信号处理技术领域,本发明旨在实现将粒子群算法应用于快速分离阶段,且有更快的收敛速度和更好的稳态性能。本发明采用的技术方案是,基于改进粒子群优化的分段盲信号分离方法,包括如下步骤:步骤(1):对于当前时刻输入的信号,计算当前的信号的整体分离程度D(t);步骤(2):根据D(t)来选择步长的确定方式,当D(t)>0.25时,分离过程处于快速分离阶段,选择改进粒子群算法来确定当前步长;步骤(3):当D(t)≤0.25时,分离过程处于精细分离阶段,选择相对平缓的非线性函数来确定当前步长;利用改进的

基于粒子群优化BP神经网络的脉象识别方法.docx
基于粒子群优化BP神经网络的脉象识别方法摘要:脉象识别是一项重要的临床技术,可以帮助医生诊断心血管疾病和其他相关病症。本文提出一种基于粒子群优化BP神经网络的脉象识别方法。该方法首先提取脉搏信号的时间域和频域特征,然后使用粒子群优化算法对BP神经网络进行训练和优化,最后使用训练好的模型进行脉象识别。实验结果表明,该方法具有较高的准确率和鲁棒性,可作为一种有效的脉象识别方法用于临床实践。关键词:脉象识别,粒子群优化,BP神经网络,时间域特征,频域特征一、引言脉象识别是一项重要的临床技术,可以帮助医生诊断心血