
一种基于非线性动态系统的图像去模糊方法.pdf

羽沫****魔王


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于非线性动态系统的图像去模糊方法.pdf
本发明属于图像处理领域,特别涉及到一种基于学习的非线性动态系统去模糊的方法。首先,对于一张要去模糊的图像,用可学习的非线性动态系统来控制核估计能量;其次,经过不断迭代潜在图像和模糊核的方法,得到一个较好的对模糊核的估计;最后,将盲去模糊的问题变转化为非盲去模糊的问题,便可使用现成的各种非盲去模糊方法求解。该方法贡献有三:其一,提供了一个解决去模糊问题的新原则,即用一种可学习的动态系统控制核估计而不是人工设定的正则化;其二,设计了一种用来学习动态系统中组成元素的新结构,此结构帮助得到了适合的且灵活的去模糊系

一种基于动态区域卷积的图像去模糊方法.pdf
本发明公开了一种基于动态区域卷积的图像去模糊方法,首先构造动态卷积层,在输入的不同区域中使用不同的卷积核进行卷积;然后使用动态卷积层构造生成器,将模糊图转变为清晰图像;构造判别器,与生成器构成生成对抗网络,并使用真实的清晰图像与生成器生成的清晰图像的损失网络进行训练;训练结束后,仅保留生成器;将模糊图像输入训练后的生成器即可获得清晰图像。本发明利用动态卷积,考虑到了输入数据的区域之间的差异性,针对不同区域使用不同卷积核进行卷积,从而提升特征提取能力。由动态卷积构造的生成对抗网络在单张图像去模糊任务中性能有
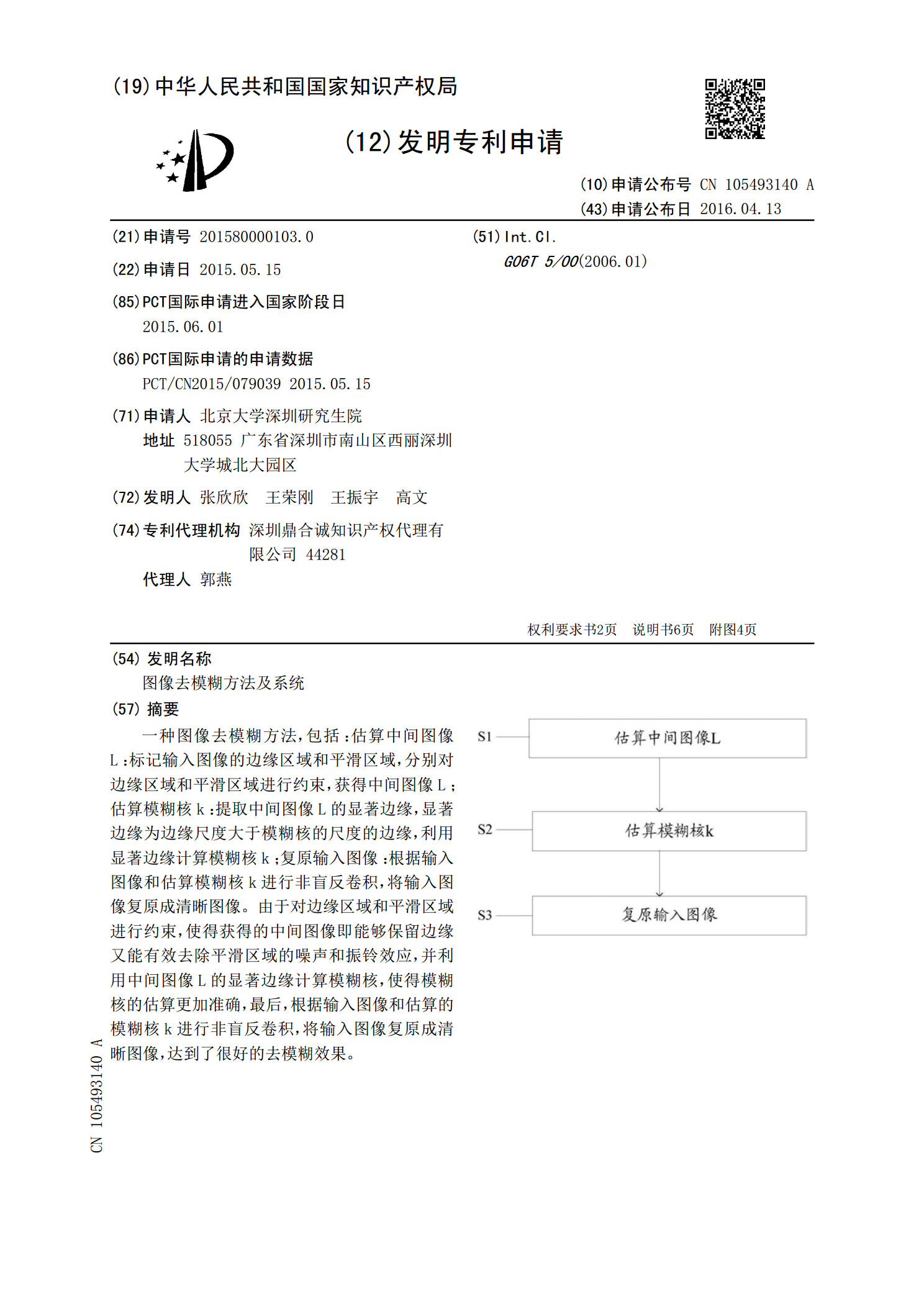
图像去模糊方法及系统.pdf
一种图像去模糊方法,包括:估算中间图像L:标记输入图像的边缘区域和平滑区域,分别对边缘区域和平滑区域进行约束,获得中间图像L;估算模糊核k:提取中间图像L的显著边缘,显著边缘为边缘尺度大于模糊核的尺度的边缘,利用显著边缘计算模糊核k;复原输入图像:根据输入图像和估算模糊核k进行非盲反卷积,将输入图像复原成清晰图像。由于对边缘区域和平滑区域进行约束,使得获得的中间图像即能够保留边缘又能有效去除平滑区域的噪声和振铃效应,并利用中间图像L的显著边缘计算模糊核,使得模糊核的估算更加准确,最后,根据输入图像和估算的
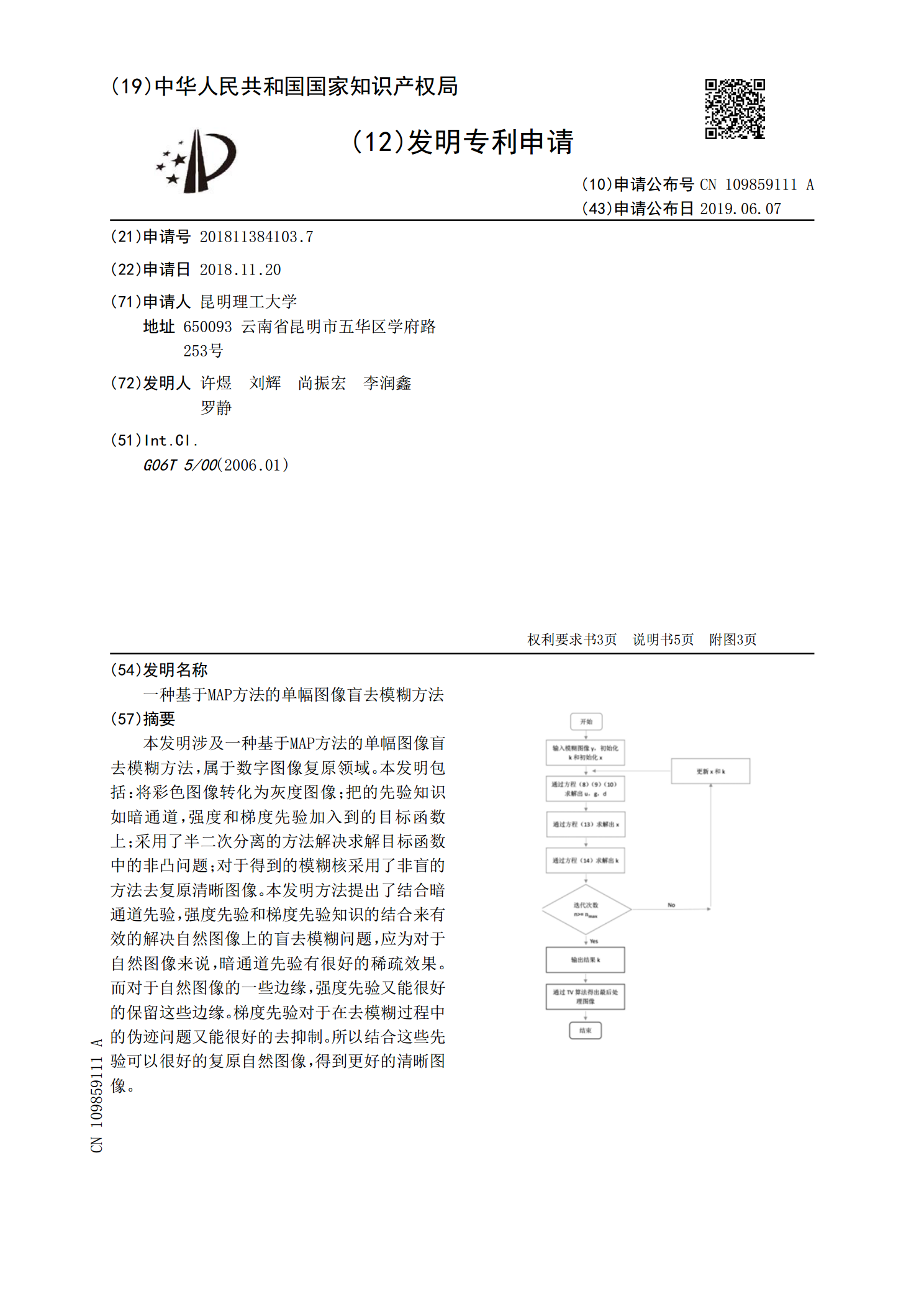
一种基于MAP方法的单幅图像盲去模糊方法.pdf
本发明涉及一种基于MAP方法的单幅图像盲去模糊方法,属于数字图像复原领域。本发明包括:将彩色图像转化为灰度图像;把的先验知识如暗通道,强度和梯度先验加入到的目标函数上;采用了半二次分离的方法解决求解目标函数中的非凸问题;对于得到的模糊核采用了非盲的方法去复原清晰图像。本发明方法提出了结合暗通道先验,强度先验和梯度先验知识的结合来有效的解决自然图像上的盲去模糊问题,应为对于自然图像来说,暗通道先验有很好的稀疏效果。而对于自然图像的一些边缘,强度先验又能很好的保留这些边缘。梯度先验对于在去模糊过程中的伪迹问题
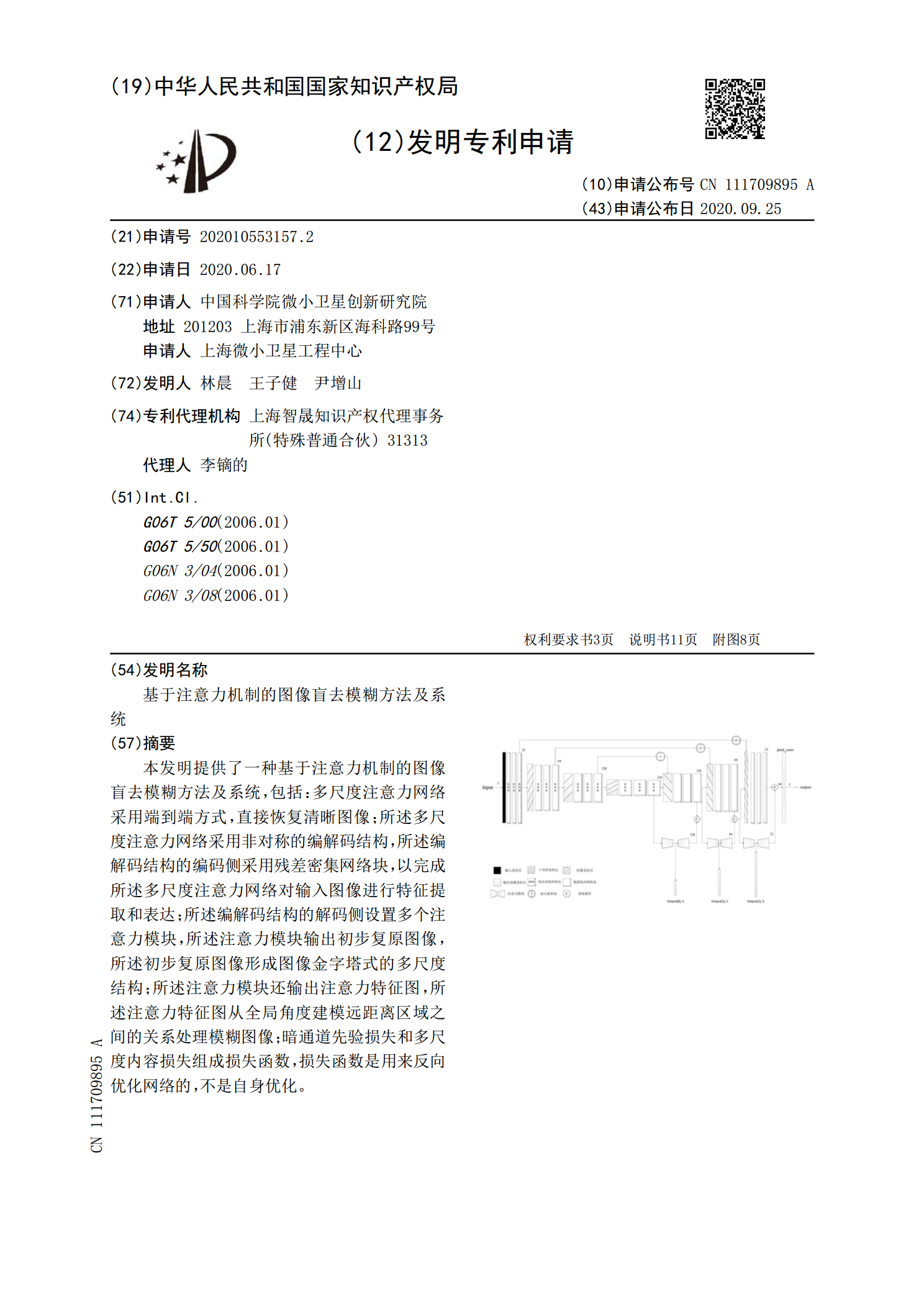
基于注意力机制的图像盲去模糊方法及系统.pdf
本发明提供了一种基于注意力机制的图像盲去模糊方法及系统,包括:多尺度注意力网络采用端到端方式,直接恢复清晰图像;所述多尺度注意力网络采用非对称的编解码结构,所述编解码结构的编码侧采用残差密集网络块,以完成所述多尺度注意力网络对输入图像进行特征提取和表达;所述编解码结构的解码侧设置多个注意力模块,所述注意力模块输出初步复原图像,所述初步复原图像形成图像金字塔式的多尺度结构;所述注意力模块还输出注意力特征图,所述注意力特征图从全局角度建模远距离区域之间的关系处理模糊图像;暗通道先验损失和多尺度内容损失组成损失