
一种QAM信号盲载波相位估计方法及系统.pdf

莉娜****ua

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种QAM信号盲载波相位估计方法及系统.pdf
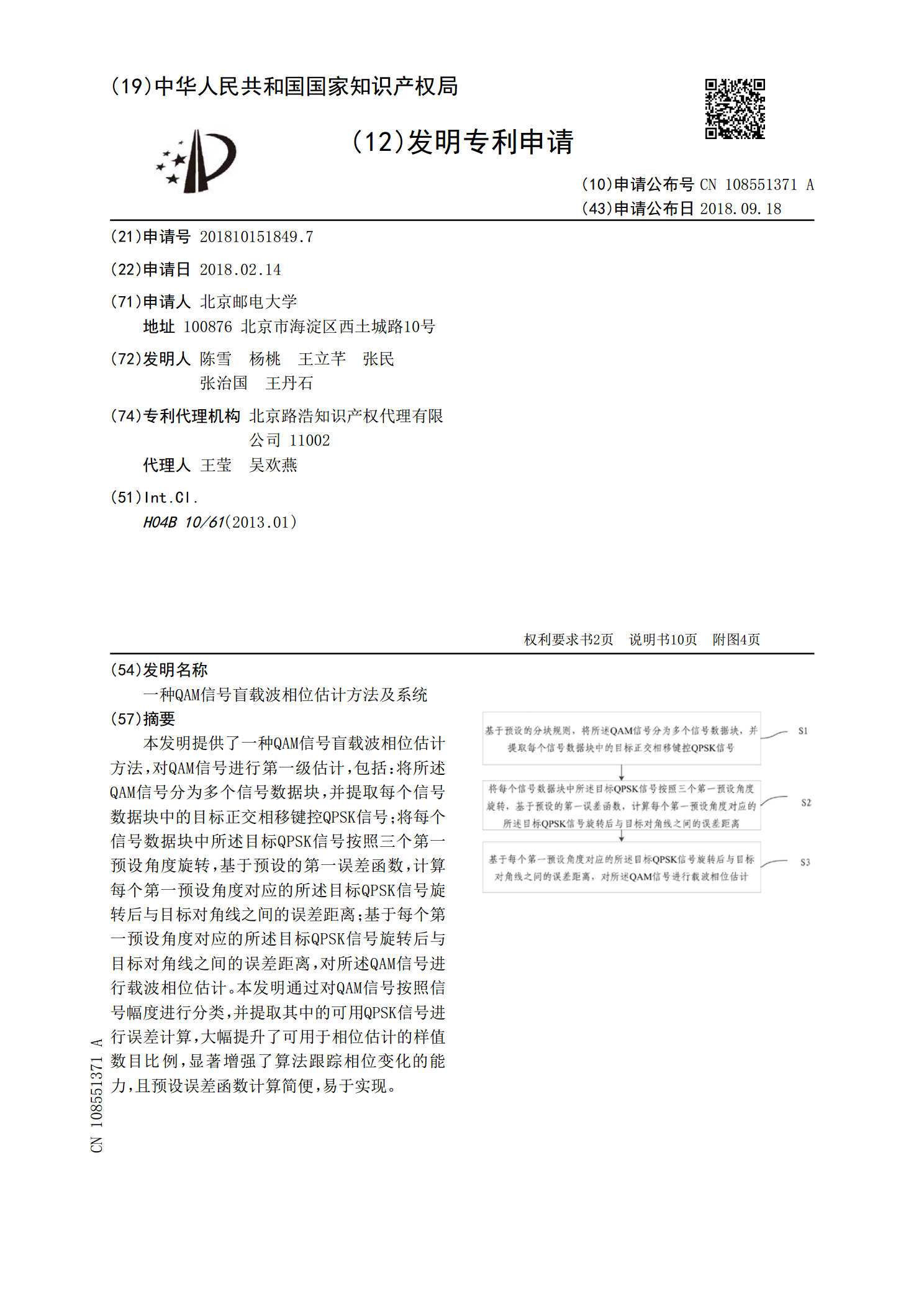
本发明提供了一种QAM信号盲载波相位估计方法,对QAM信号进行第一级估计,包括:将所述QAM信号分为多个信号数据块,并提取每个信号数据块中的目标正交相移键控QPSK信号;将每个信号数据块中所述目标QPSK信号按照三个第一预设角度旋转,基于预设的第一误差函数,计算每个第一预设角度对应的所述目标QPSK信号旋转后与目标对角线之间的误差距离;基于每个第一预设角度对应的所述目标QPSK信号旋转后与目标对角线之间的误差距离,对所述QAM信号进行载波相位估计。本发明通过对QAM信号按照信号幅度进行分类,并提取其中的可
一种对QAM信号进行非数据辅助的相位噪声盲估计方法.pdf
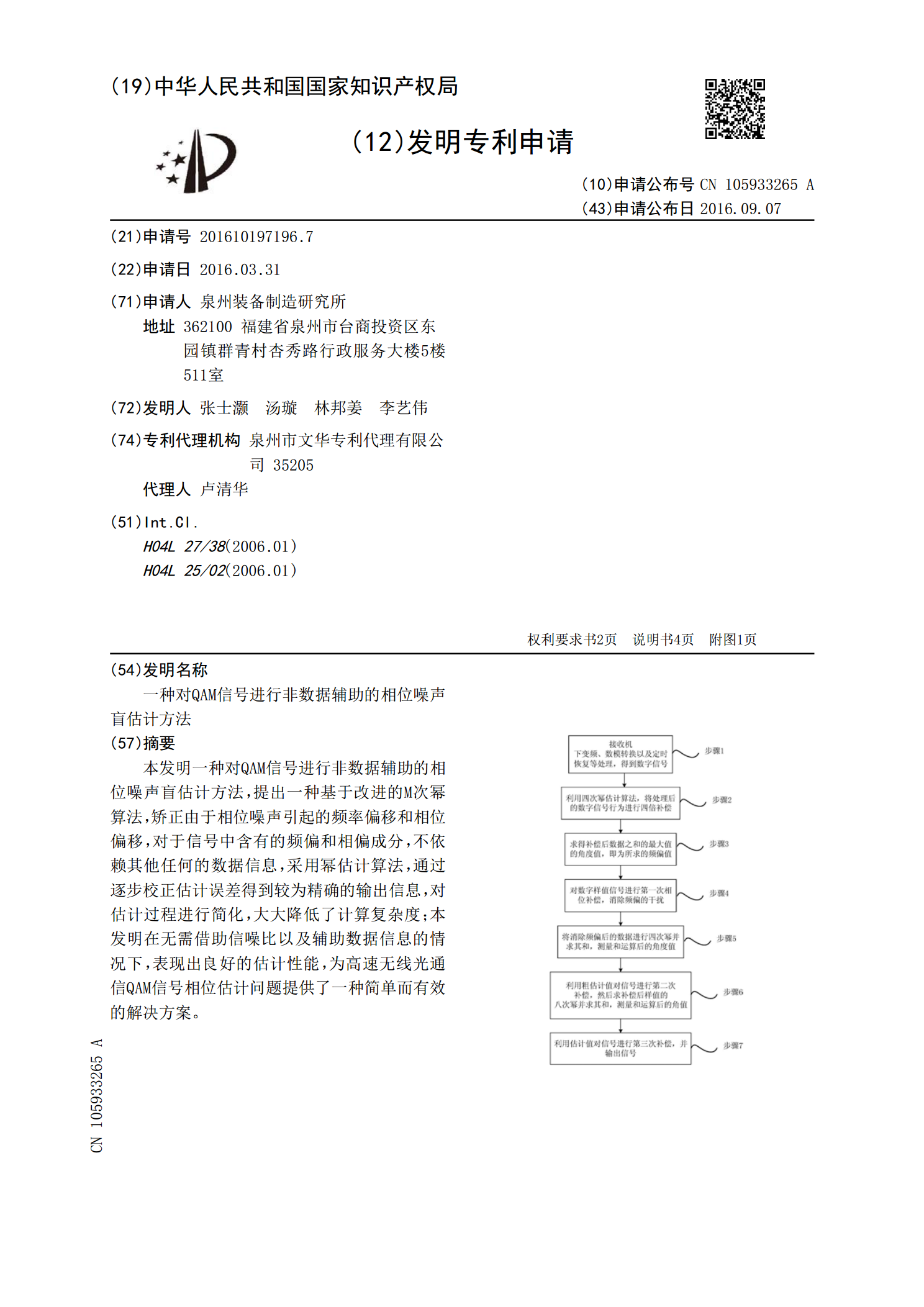
本发明一种对QAM信号进行非数据辅助的相位噪声盲估计方法,提出一种基于改进的M次幂算法,矫正由于相位噪声引起的频率偏移和相位偏移,对于信号中含有的频偏和相偏成分,不依赖其他任何的数据信息,采用幂估计算法,通过逐步校正估计误差得到较为精确的输出信息,对估计过程进行简化,大大降低了计算复杂度;本发明在无需借助信噪比以及辅助数据信息的情况下,表现出良好的估计性能,为高速无线光通信QAM信号相位估计问题提供了一种简单而有效的解决方案。

QAM光信号相干检测载波相位恢复的研究.docx
QAM光信号相干检测载波相位恢复的研究Title:ResearchonCoherentDetectionandCarrierPhaseRecoveryofQAMOpticalSignalsAbstract:CoherentdetectionandcarrierphaserecoveryarevitaltechniquesforQAM(QuadratureAmplitudeModulation)opticalsignaltransmission.Inthispaper,weinvestigatethepri

连续相位调制信号的参数盲估计.docx
连续相位调制信号的参数盲估计一、前言在通信系统中,信号调制是一项非常重要的技术,可以实现信号的传输、判别和译码等功能,在现代通信中得到了广泛的应用。其中,连续相位调制信号是一种常用的数字调制方式,也是现代数字通信和数据传输领域中较为流行的一种调制方式。在实际应用中,常常需要对连续相位调制的信号进行参数估计,以保证系统可靠的运行。本文将探讨连续相位调制信号的参数盲估计方法。二、基本概念(一)连续相位调制连续相位调制(ContinuousPhaseModulation,CPM)是一种数字调制方式,是由时变幅度
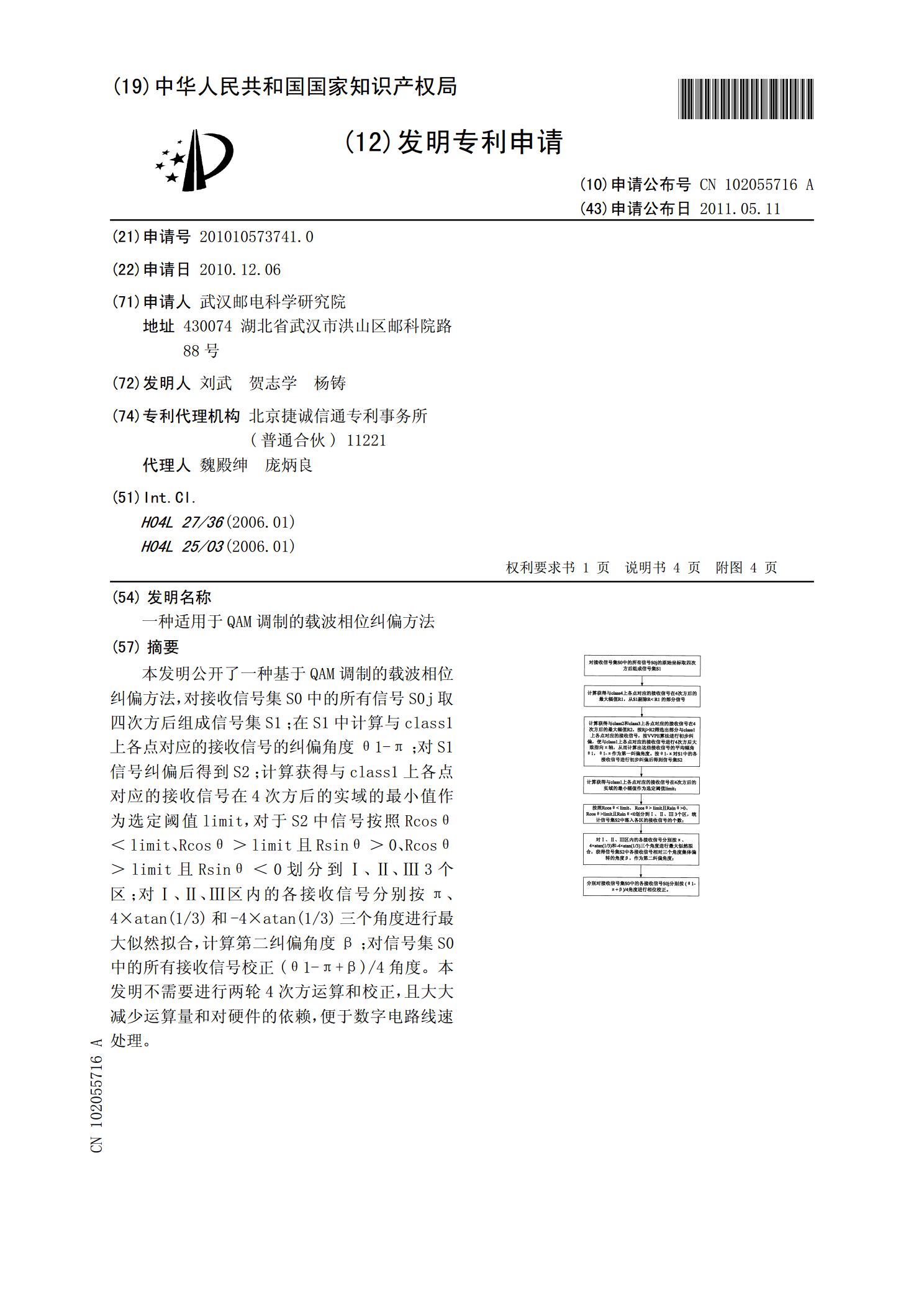
一种适用于QAM调制的载波相位纠偏方法.pdf
本发明公开了一种基于QAM调制的载波相位纠偏方法,对接收信号集S0中的所有信号S0j取四次方后组成信号集S1;在S1中计算与class1上各点对应的接收信号的纠偏角度θ1-π;对S1信号纠偏后得到S2;计算获得与class1上各点对应的接收信号在4次方后的实域的最小值作为选定阈值limit,对于S2中信号按照Rcosθ<limit、Rcosθ>limit且Rsinθ>0、Rcosθ>limit且Rsinθ<0划分到Ⅰ、Ⅱ、Ⅲ3个区;对Ⅰ、Ⅱ、Ⅲ区内的各接收信号分别按π、4×atan(1/3)和-4×ata