
基于边缘感知的图像盲去模糊组合稀疏优化方法.pdf

Ch****75

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于边缘感知的图像盲去模糊组合稀疏优化方法.pdf
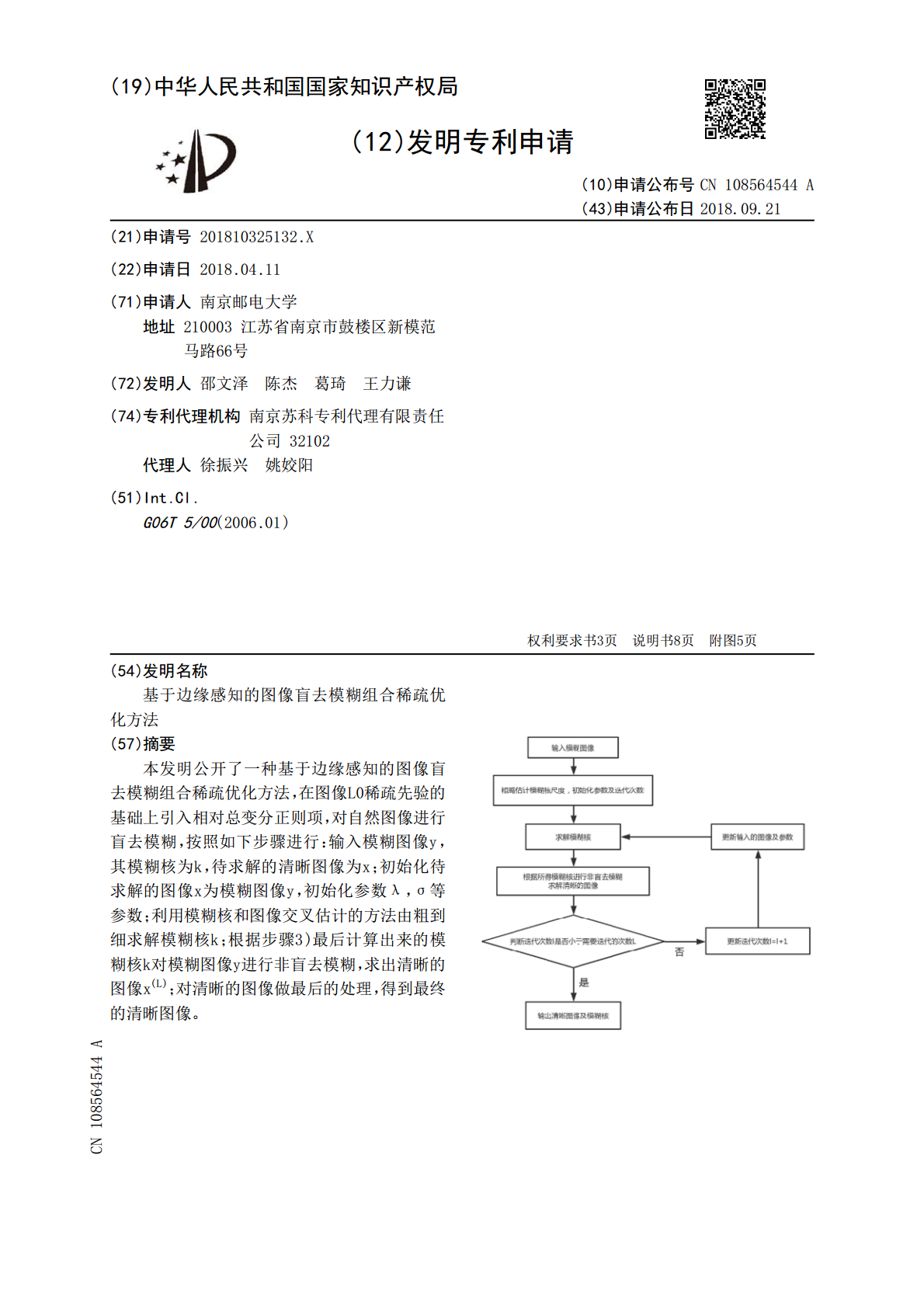
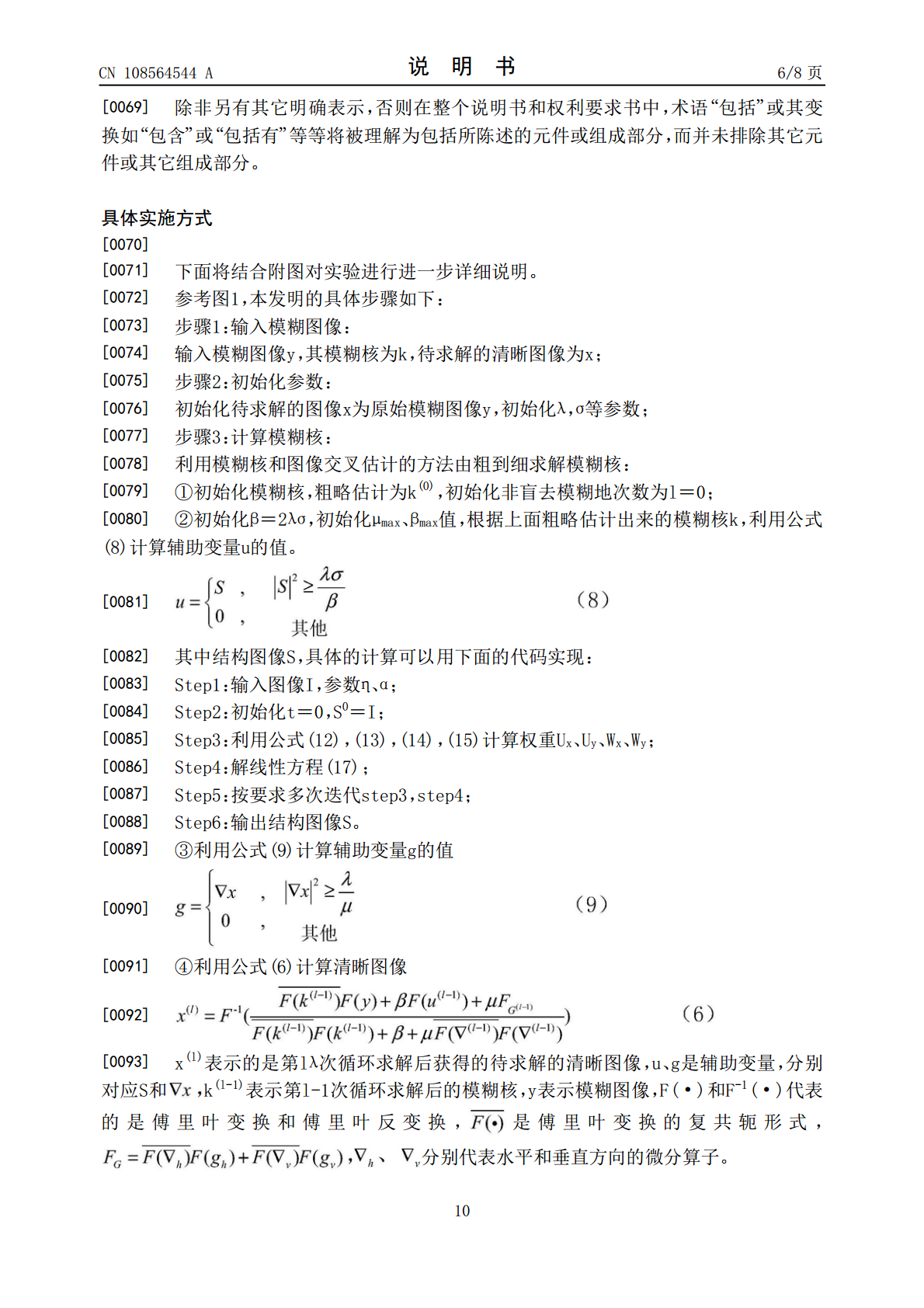
本发明公开了一种基于边缘感知的图像盲去模糊组合稀疏优化方法,在图像L0稀疏先验的基础上引入相对总变分正则项,对自然图像进行盲去模糊,按照如下步骤进行:输入模糊图像y,其模糊核为k,待求解的清晰图像为x;初始化待求解的图像x为模糊图像y,初始化参数λ,σ等参数;利用模糊核和图像交叉估计的方法由粗到细求解模糊核k;根据步骤3)最后计算出来的模糊核k对模糊图像y进行非盲去模糊,求出清晰的图像x
基于稀疏性度量的图像盲去模糊方法.pdf
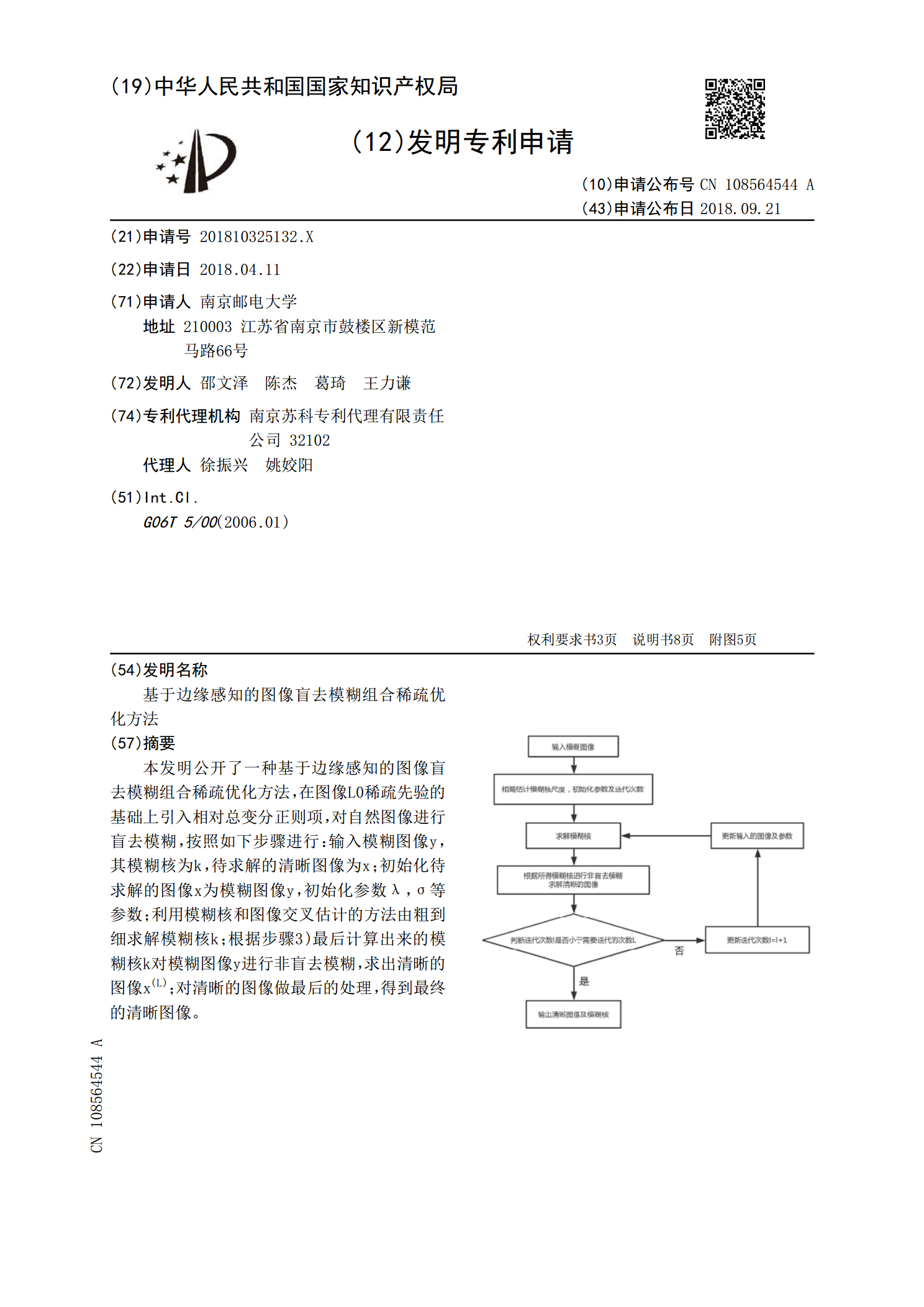
本发明公开了一种基于稀疏性度量的图像盲去模糊的方法,主要解决现有技术在图像盲去模糊时,对噪声敏感且存在严重的振铃效应的问题。其实现过程为:(1)用现有的方法,获得两种不同的模糊核kf和ks;(2)线性组合这两种不同的模糊核得到一个模糊字典kd={k1,k2....k10};(3)在模糊图像上选取一个有明显边缘的图像块P,用模糊字典kd对图像块P用Lucy-Richardson方法进行预处理,得到预处理的图像块C1,C2,C3...C10;(4)对预处理的图像块C1,C2,C3...C10进行稀疏性测量得到
基于图像块先验与稀疏范数的盲去模糊方法.pdf
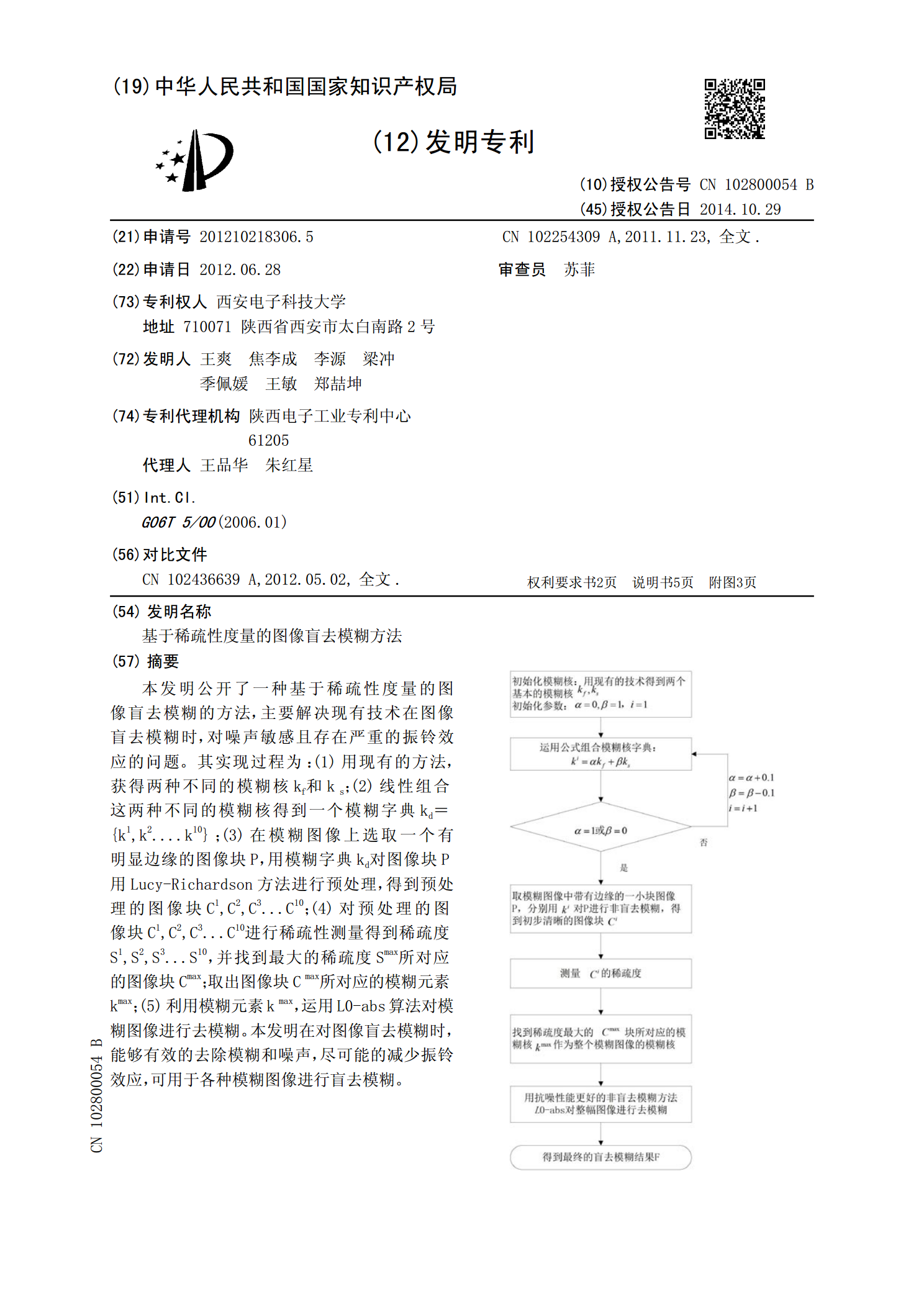
本发明提出一种基于图像块先验与稀疏范数的盲去模糊方法,主要是解决现有技术对图像去模糊质量差的问题,其方案是:输入模糊图像;初始化模糊核、二进制掩模,候选图像;调用金字塔模型,将候选图像根据金字塔层数下采样,对候选图像与模糊核上采样;更新二进制掩模、更新图像块方差、更新图像样例块;固定参数更新模糊核、候选图像,直到金字塔最后一层;设置迭代次数,固定模糊核以及候选图像的范数保持不变,对模糊核添加的l
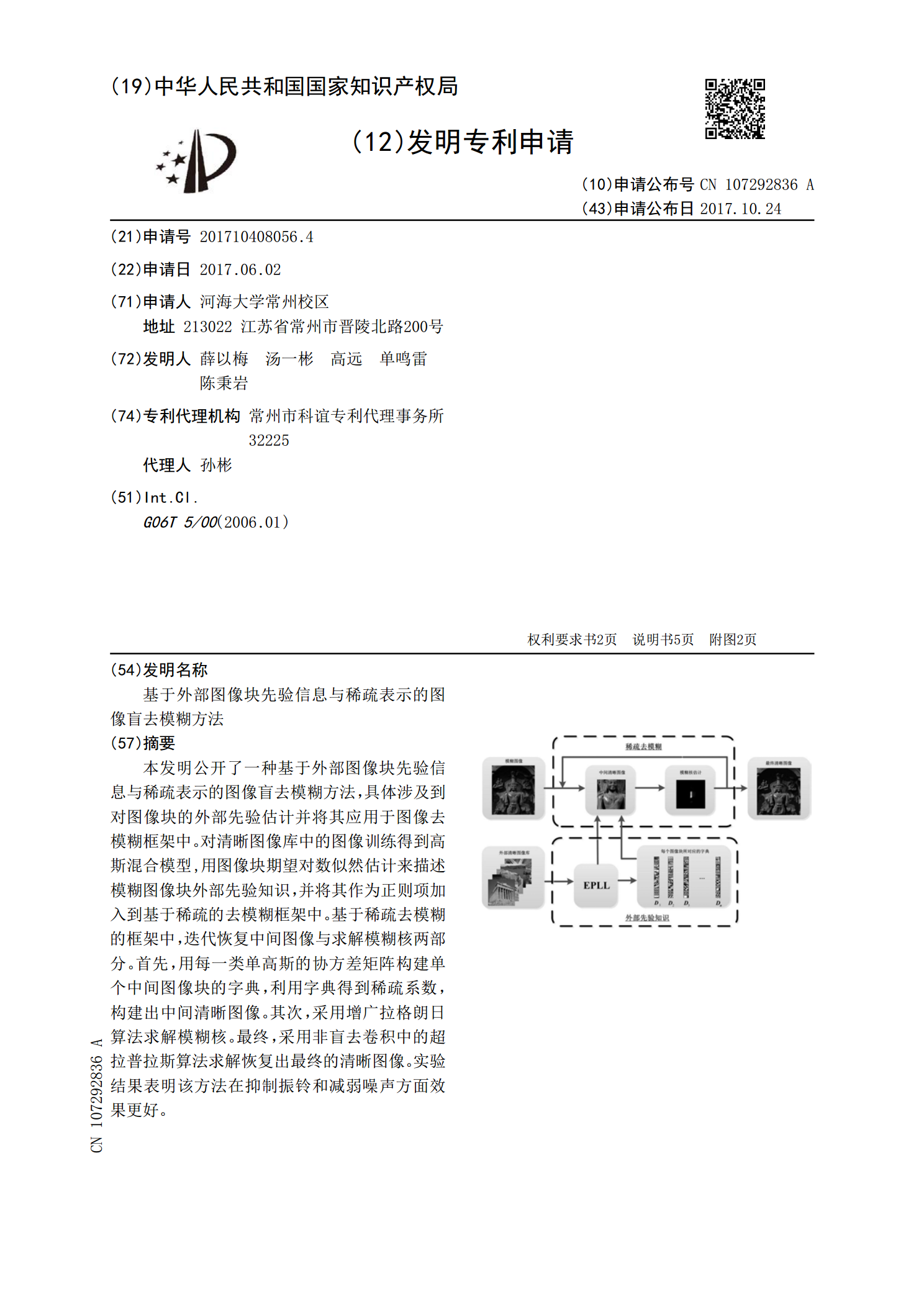
基于外部图像块先验信息与稀疏表示的图像盲去模糊方法.pdf
本发明公开了一种基于外部图像块先验信息与稀疏表示的图像盲去模糊方法,具体涉及到对图像块的外部先验估计并将其应用于图像去模糊框架中。对清晰图像库中的图像训练得到高斯混合模型,用图像块期望对数似然估计来描述模糊图像块外部先验知识,并将其作为正则项加入到基于稀疏的去模糊框架中。基于稀疏去模糊的框架中,迭代恢复中间图像与求解模糊核两部分。首先,用每一类单高斯的协方差矩阵构建单个中间图像块的字典,利用字典得到稀疏系数,构建出中间清晰图像。其次,采用增广拉格朗日算法求解模糊核。最终,采用非盲去卷积中的超拉普拉斯算法求
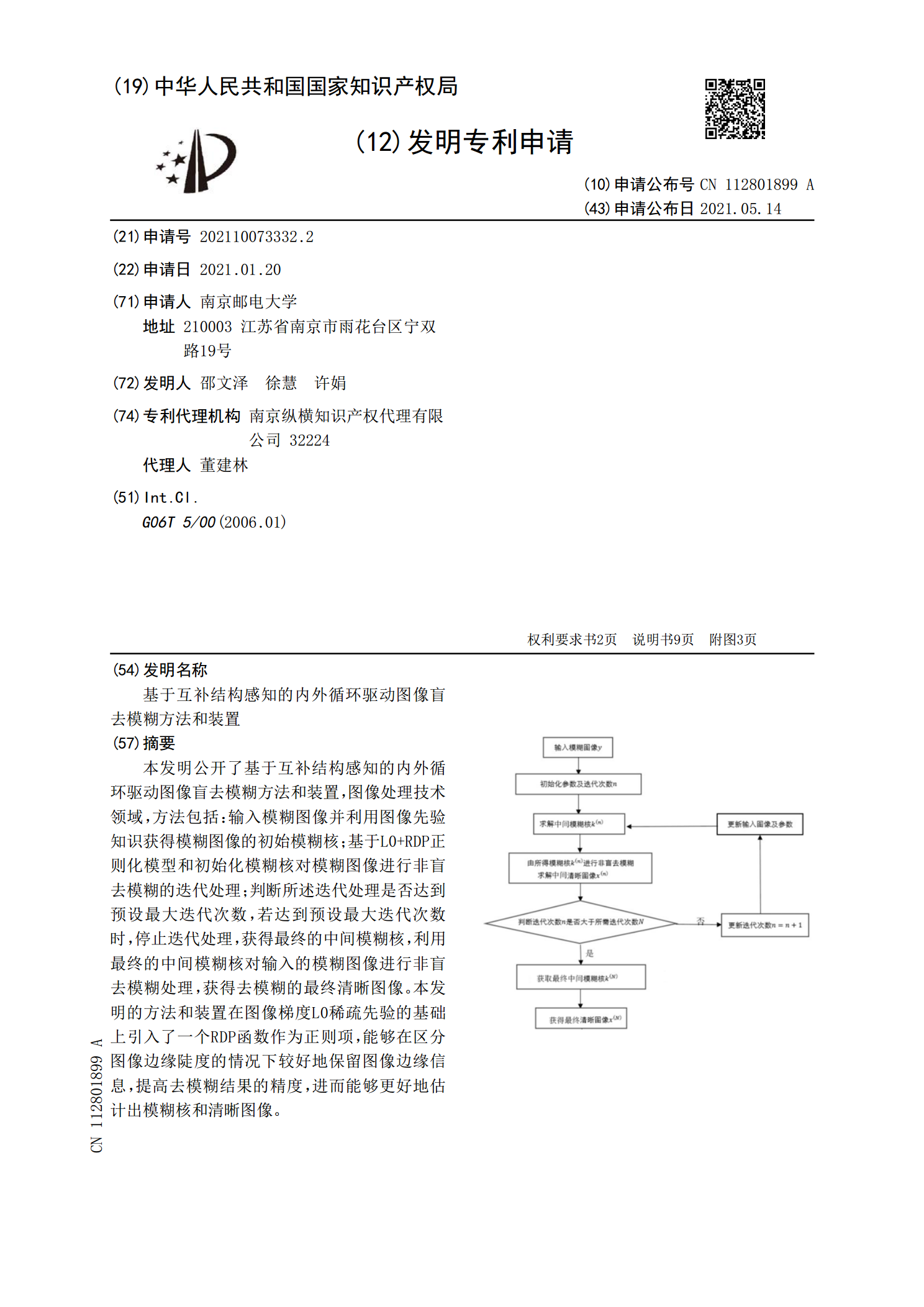
基于互补结构感知的内外循环驱动图像盲去模糊方法和装置.pdf
本发明公开了基于互补结构感知的内外循环驱动图像盲去模糊方法和装置,图像处理技术领域,方法包括:输入模糊图像并利用图像先验知识获得模糊图像的初始模糊核;基于L0+RDP正则化模型和初始化模糊核对模糊图像进行非盲去模糊的迭代处理;判断所述迭代处理是否达到预设最大迭代次数,若达到预设最大迭代次数时,停止迭代处理,获得最终的中间模糊核,利用最终的中间模糊核对输入的模糊图像进行非盲去模糊处理,获得去模糊的最终清晰图像。本发明的方法和装置在图像梯度L0稀疏先验的基础上引入了一个RDP函数作为正则项,能够在区分图像边缘