
一种盲人智能辅助出行方法及系统.pdf

一吃****春艳


1/10
2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种盲人智能辅助出行方法及系统.pdf
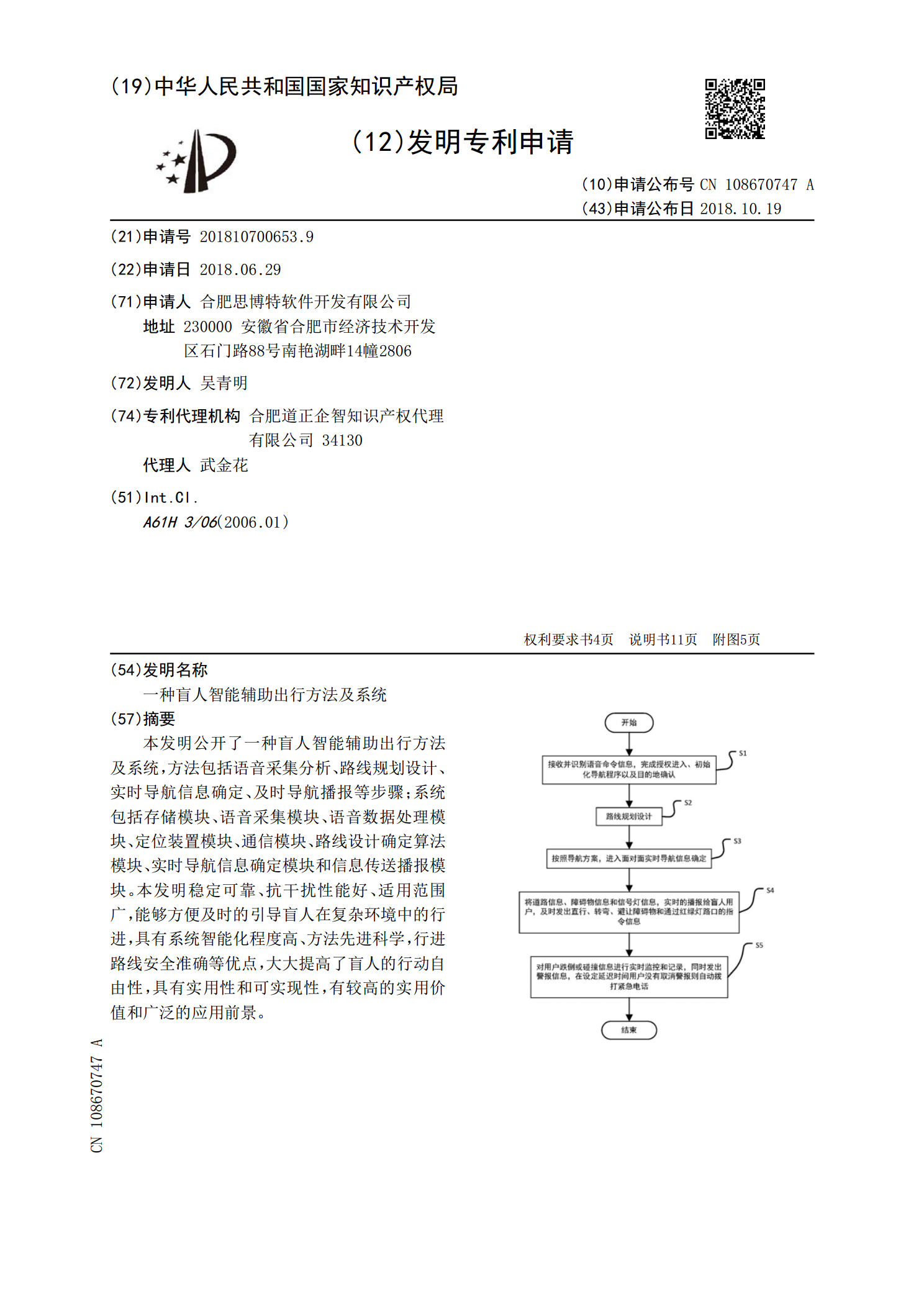
本发明公开了一种盲人智能辅助出行方法及系统,方法包括语音采集分析、路线规划设计、实时导航信息确定、及时导航播报等步骤;系统包括存储模块、语音采集模块、语音数据处理模块、定位装置模块、通信模块、路线设计确定算法模块、实时导航信息确定模块和信息传送播报模块。本发明稳定可靠、抗干扰性能好、适用范围广,能够方便及时的引导盲人在复杂环境中的行进,具有系统智能化程度高、方法先进科学,行进路线安全准确等优点,大大提高了盲人的行动自由性,具有实用性和可实现性,有较高的实用价值和广泛的应用前景。

智能盲人出行辅助系统.pdf
本发明涉及智能导航的技术领域,且公开了智能盲人出行辅助系统,包括主系统,主系统的输出端电信号连接有双线程创建模块,双线程创建模块的输出端电信号连接有特征提取线程与数据处理线程,特征提取线程的输出端电信号连接有图像预处理模块,图像预处理模块的输出端电信号连接有特征提取模块,数据处理线程的输出端电信号连接有数据获取模块,通过采用基于卷积神经网络的目标算法YOLOV5s,能够识别出周围环境的物体,同时使用了低照度增强算法,使整体辅助系统可以在夜晚或在光线较弱的场景下表现良好,从而对不同环境下的障碍物进行精准的
社会空间盲人智能出行辅助系统及方法.pdf
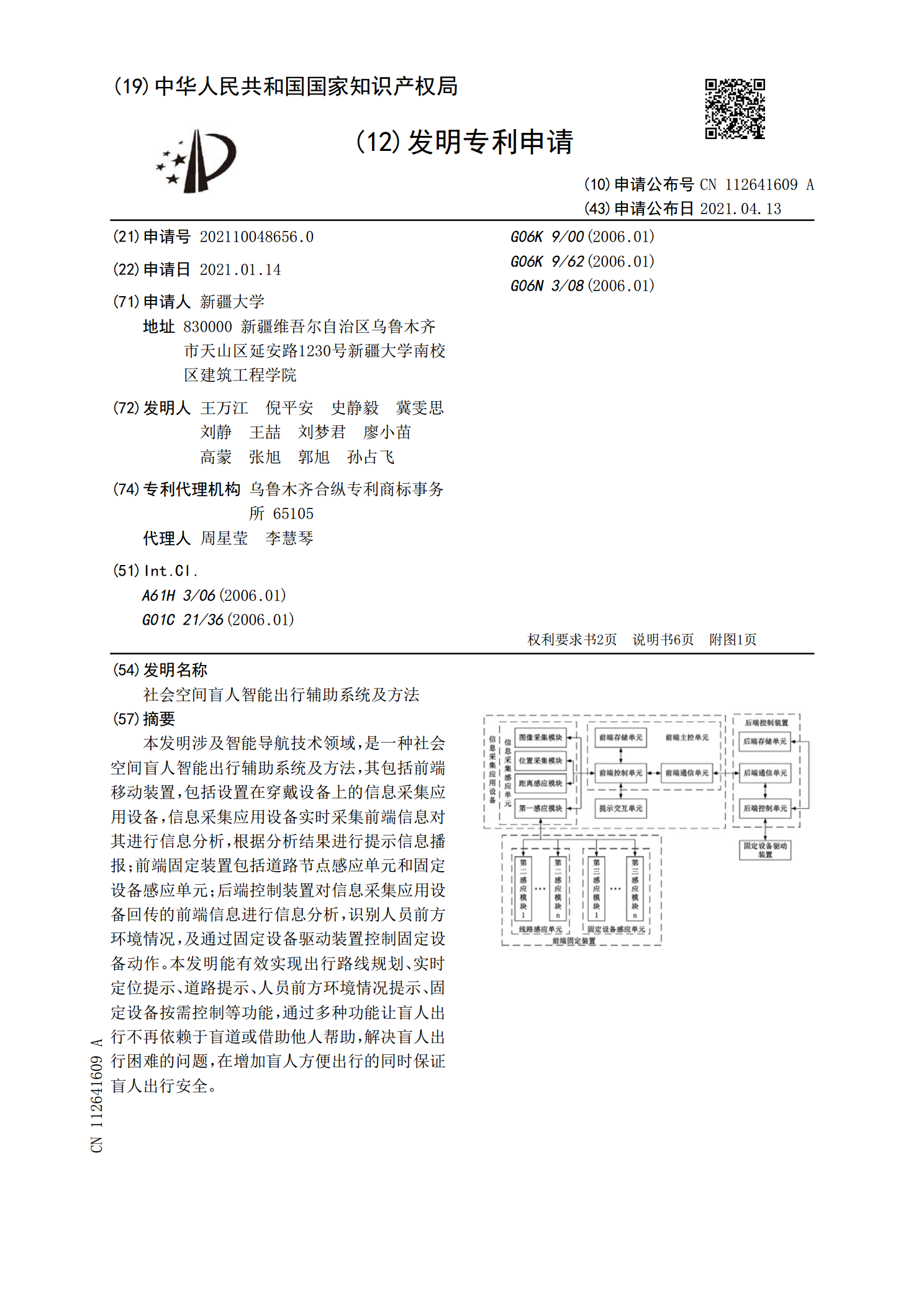
本发明涉及智能导航技术领域,是一种社会空间盲人智能出行辅助系统及方法,其包括前端移动装置,包括设置在穿戴设备上的信息采集应用设备,信息采集应用设备实时采集前端信息对其进行信息分析,根据分析结果进行提示信息播报;前端固定装置包括道路节点感应单元和固定设备感应单元;后端控制装置对信息采集应用设备回传的前端信息进行信息分析,识别人员前方环境情况,及通过固定设备驱动装置控制固定设备动作。本发明能有效实现出行路线规划、实时定位提示、道路提示、人员前方环境情况提示、固定设备按需控制等功能,通过多种功能让盲人出行不再依
一种盲人智能导航避障出行辅助方法及系统.pdf
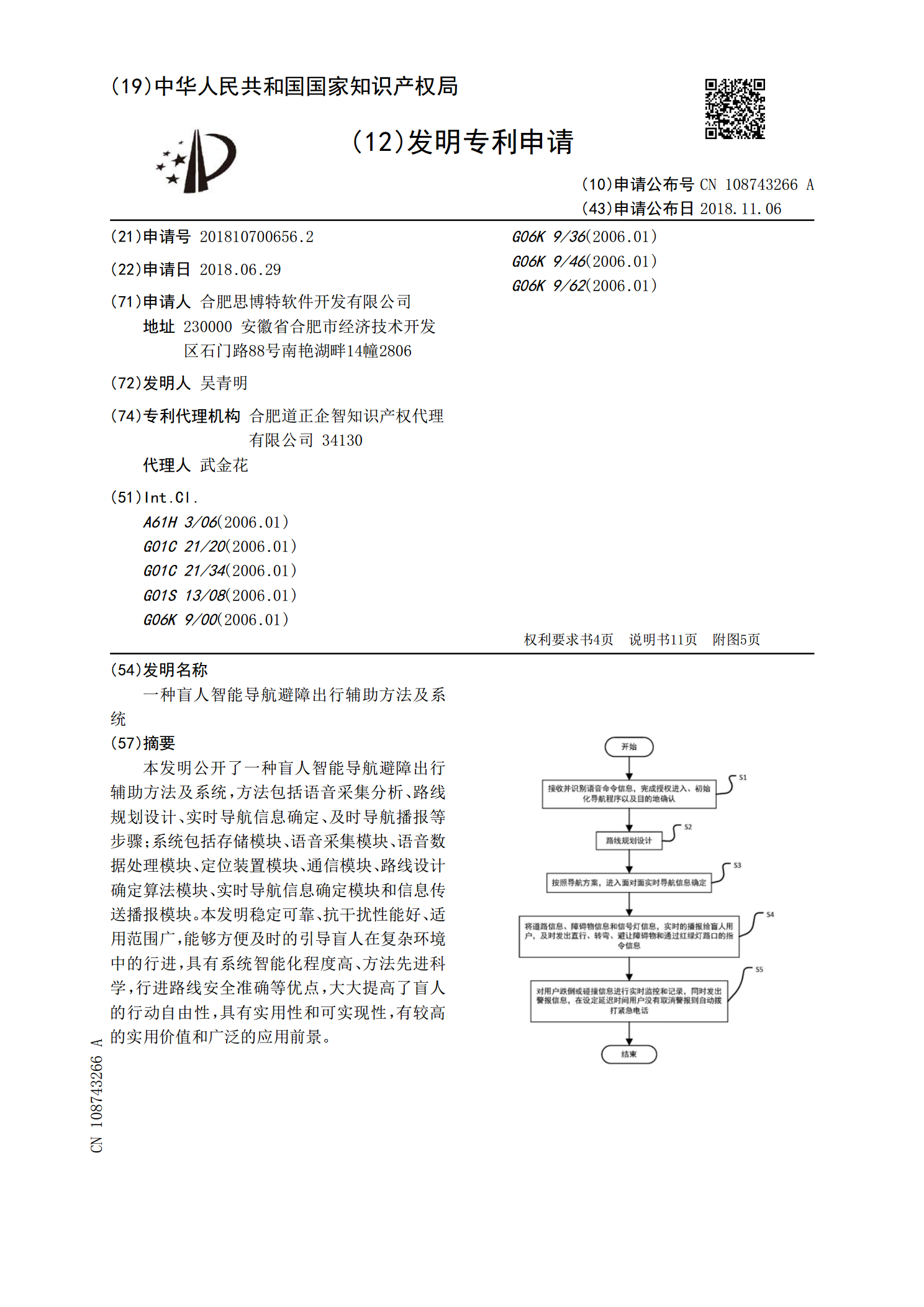
本发明公开了一种盲人智能导航避障出行辅助方法及系统,方法包括语音采集分析、路线规划设计、实时导航信息确定、及时导航播报等步骤;系统包括存储模块、语音采集模块、语音数据处理模块、定位装置模块、通信模块、路线设计确定算法模块、实时导航信息确定模块和信息传送播报模块。本发明稳定可靠、抗干扰性能好、适用范围广,能够方便及时的引导盲人在复杂环境中的行进,具有系统智能化程度高、方法先进科学,行进路线安全准确等优点,大大提高了盲人的行动自由性,具有实用性和可实现性,有较高的实用价值和广泛的应用前景。
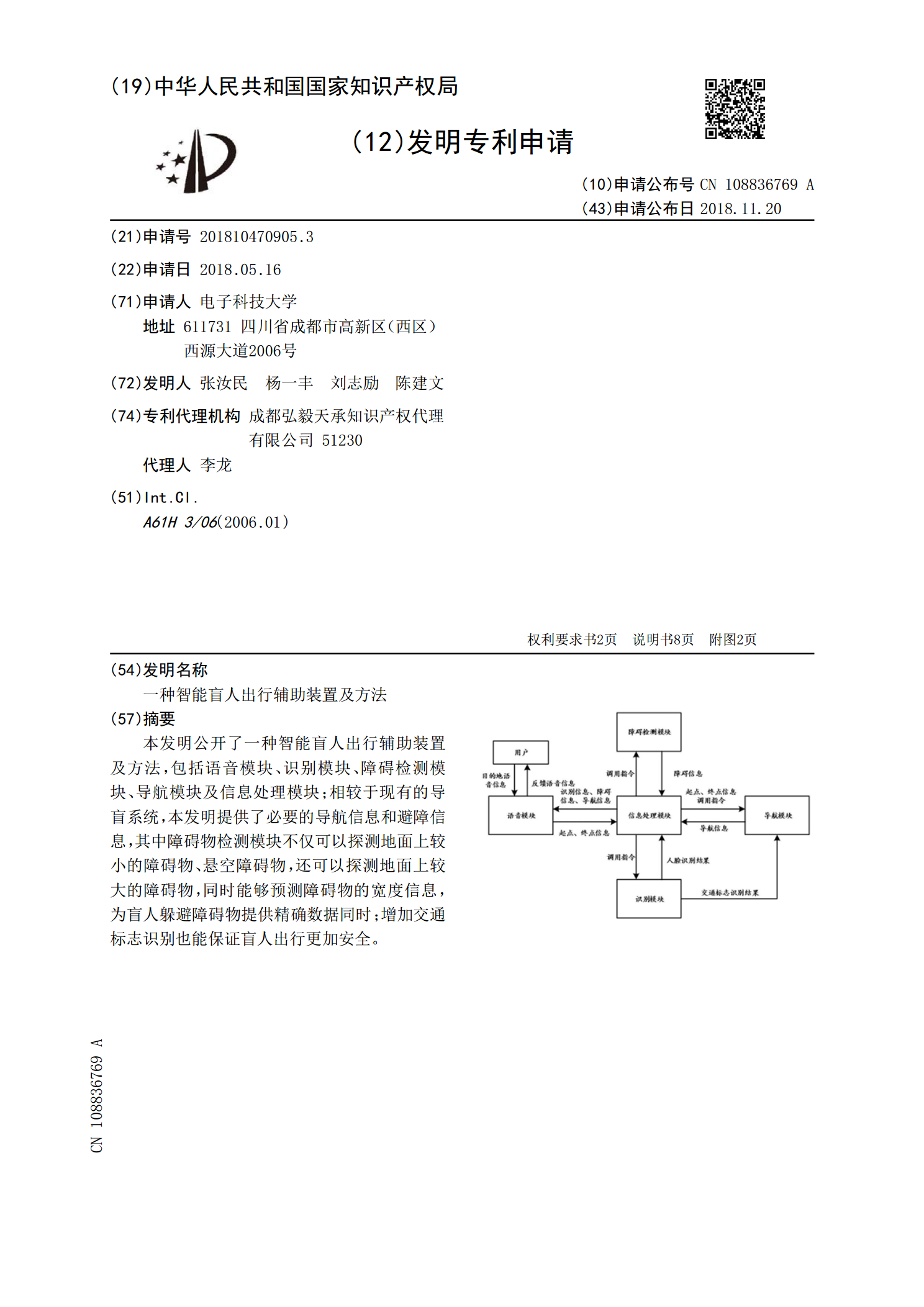
一种智能盲人出行辅助装置及方法.pdf
本发明公开了一种智能盲人出行辅助装置及方法,包括语音模块、识别模块、障碍检测模块、导航模块及信息处理模块;相较于现有的导盲系统,本发明提供了必要的导航信息和避障信息,其中障碍物检测模块不仅可以探测地面上较小的障碍物、悬空障碍物,还可以探测地面上较大的障碍物,同时能够预测障碍物的宽度信息,为盲人躲避障碍物提供精确数据同时;增加交通标志识别也能保证盲人出行更加安全。