
一种用于水面和水坑检测的盲人辅助眼镜.pdf

一只****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于水面和水坑检测的盲人辅助眼镜.pdf
本发明公开了一种水面和水坑检测的盲人辅助眼镜。利用两个彩色相机和两个线偏振片采集图像,利用小型处理器对采集的图像进行处理,输出图像中水面的区域。该方法能够同时检测大型水面和小型路面水坑,具有统一性高,实时性高,不需要特定假设的优点,可以很好地满足视障人士在出行中避开水面和水坑的要求。
一种用于躲避水面与障碍物的盲人辅助眼镜.pdf
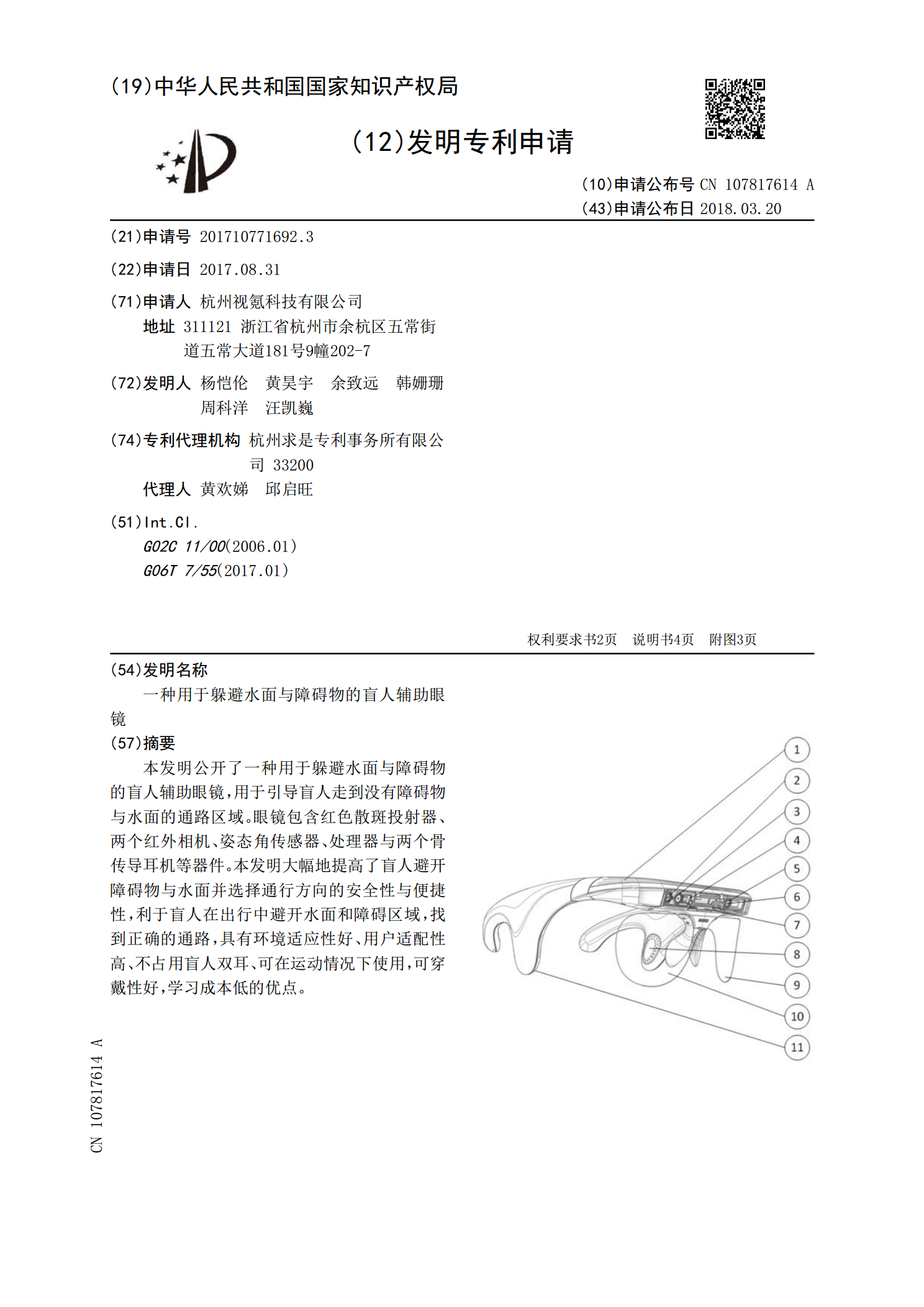
本发明公开了一种用于躲避水面与障碍物的盲人辅助眼镜,用于引导盲人走到没有障碍物与水面的通路区域。眼镜包含红色散斑投射器、两个红外相机、姿态角传感器、处理器与两个骨传导耳机等器件。本发明大幅地提高了盲人避开障碍物与水面并选择通行方向的安全性与便捷性,利于盲人在出行中避开水面和障碍区域,找到正确的通路,具有环境适应性好、用户适配性高、不占用盲人双耳、可在运动情况下使用,可穿戴性好,学习成本低的优点。

一种实现地形和目标检测的盲人辅助眼镜.pdf
本发明公开了一种实现地形和目标检测的盲人辅助眼镜,利用一个彩色相机采集图像,利用小型处理器对采集的图像进行处理,输出图像中每个像素的地形或者目标类型,得到语义分割图像,再通过语义分割图像确定需要检测地形和目标的区域。本发明能够同时检测地面、人行道、楼梯、水面等地形,行人、车辆等目标,具有统一性高,实时性高,室内外适应性高,不需要特定假设的优点,可以很好地满足视障人士出行的要求。

一种用于斑马线型人行横道检测的盲人辅助眼镜.pdf
本发明公开了一种斑马线型人行横道检测的盲人辅助眼镜。利用相机采集图像,利用小型处理器对采集的图像进行处理,输出斑马线型人行横道的距离和方向。该方法能够检测白天、黑夜等不同光照条件下的斑马线型人行横道,该方法误检率低、漏检率低、实时性好、跨平台性好。可以很好地满足视障人士过马路、无人车导航等应用场景的要求。

一种辅助盲人的智能眼镜.pdf
本发明涉及智能穿戴设备领域,具体是一种辅助盲人的智能眼镜,包括镜框、镜腿、识别模块及操作模块,所述镜腿上设有语音模块,所述语音模块用于将识别模块传输的信号通过语音进行播报,所述识别模块预设有多种辅助模式;所述操作模块包含有控制、一键求助、清除缓存及模式切换单元,所述控制单元控制识别模块启闭、拾取图像或视频信息;所述模式切换单元用于切换识别模块的多种辅助模式;本发明的有益效果是:通过控制、一键求助、清除缓存单元对识别模块进行相关处理,减少和降低了对识别模块的性能需求,通过模式切换单元取代服务器的数据处理,降