
一种基于机器视觉的无人机检测桥梁结构裂缝识别方法.pdf

长春****主a


1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的无人机检测桥梁结构裂缝识别方法.pdf
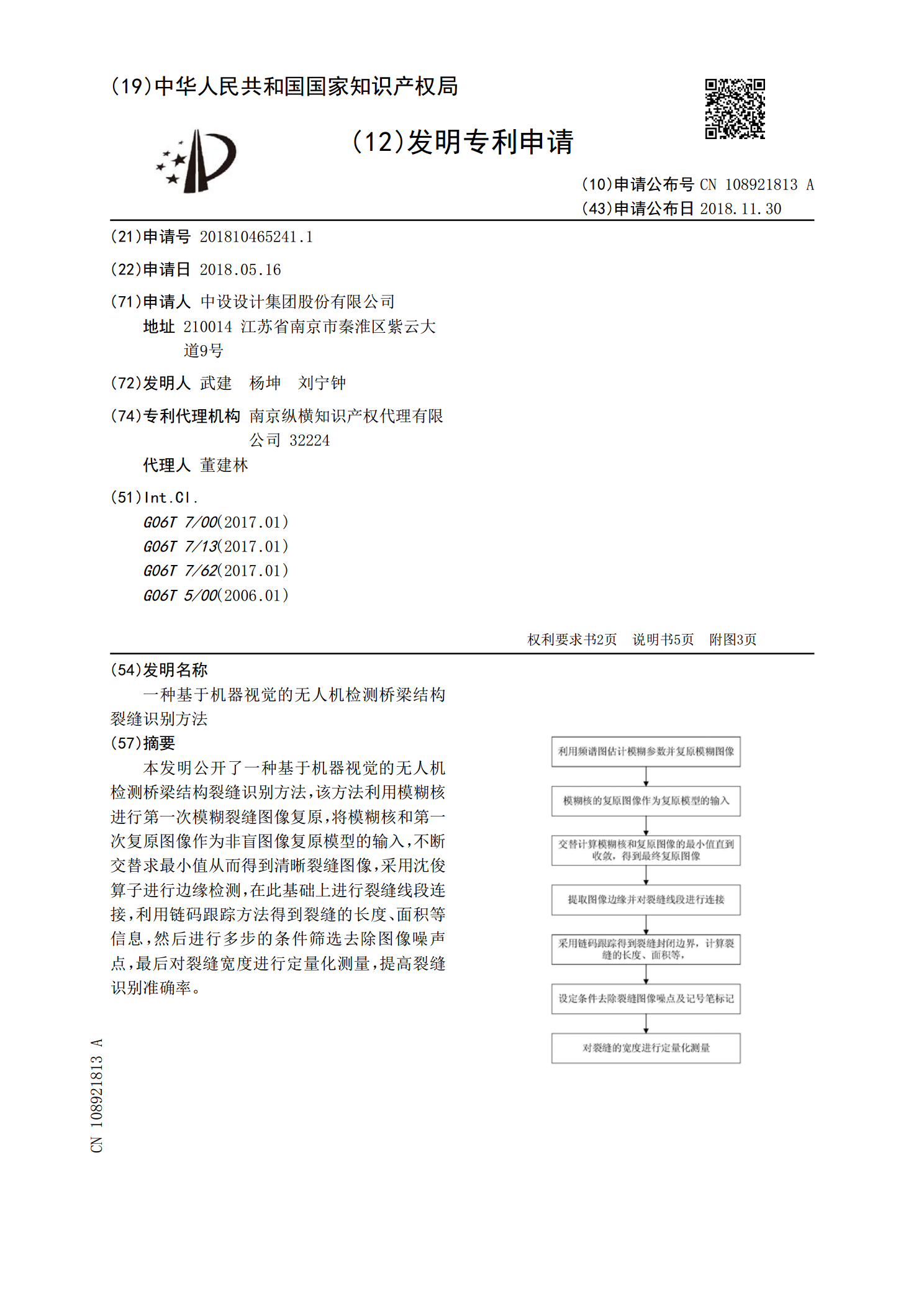
本发明公开了一种基于机器视觉的无人机检测桥梁结构裂缝识别方法,该方法利用模糊核进行第一次模糊裂缝图像复原,将模糊核和第一次复原图像作为非盲图像复原模型的输入,不断交替求最小值从而得到清晰裂缝图像,采用沈俊算子进行边缘检测,在此基础上进行裂缝线段连接,利用链码跟踪方法得到裂缝的长度、面积等信息,然后进行多步的条件筛选去除图像噪声点,最后对裂缝宽度进行定量化测量,提高裂缝识别准确率。

基于无人机视觉的桥梁裂缝检测技术研究.docx
基于无人机视觉的桥梁裂缝检测技术研究基于无人机视觉的桥梁裂缝检测技术研究摘要:近年来,桥梁的安全问题备受关注,其中桥梁裂缝是一种常见的结构缺陷。传统的桥梁裂缝检测方法通常需要人工巡检,费时费力且安全性较低。随着无人机技术的发展,无人机视觉技术在桥梁裂缝检测中有着广阔的应用前景。本文以基于无人机视觉的桥梁裂缝检测技术为研究对象,探讨了其原理、方法和应用前景,并分析了目前存在的挑战和问题。关键词:无人机视觉;桥梁裂缝检测;图像处理;深度学习;应用前景1.引言桥梁是现代交通基础设施中不可或缺的重要组成部分,其安

无人机视觉的桥梁底面裂缝检测方法.docx
无人机视觉的桥梁底面裂缝检测方法论文:无人机视觉的桥梁底面裂缝检测方法摘要:为了提高桥梁底面裂缝的检测效率和准确率,本论文提出了一种基于无人机视觉的桥梁底面裂缝检测方法。该方法通过结合无人机技术和图像处理算法,实现了对桥梁底面裂缝的快速、高效和准确的检测。具体而言,在无人机采集的桥梁底面图像中,采用基于视觉特征的图像分割算法提取出裂缝区域,再通过形态学处理和边缘检测算法对裂缝进行进一步的检测和识别。实验结果表明,本方法可以有效地实现对桥梁底面裂缝的自动化检测和可视化表示。关键词:无人机视觉,桥梁底面裂缝,

基于无人机视觉的桥梁裂缝检测技术研究的开题报告.docx
基于无人机视觉的桥梁裂缝检测技术研究的开题报告一、研究背景桥梁作为公路、铁路等基础设施的重要组成部分,承担着连接不同地区的交通和物流运输的重要使命。然而,由于长期的使用和自然环境的影响,桥梁难免会出现各种问题,其中裂缝问题是比较常见的一种,尤其是在混凝土桥梁中更为普遍。因此,及时有效地检测和修复桥梁裂缝,对于保障交通运输安全,延长桥梁寿命,具有重要意义。传统的桥梁裂缝检测方法多采用人工巡查或特殊设备检测等手段,这些方法存在着效率低、耗时长、覆盖面积小、检测结果有误差等问题。另外,由于桥梁结构本身的复杂性和
基于机器视觉的桥梁动力特性识别方法.pdf
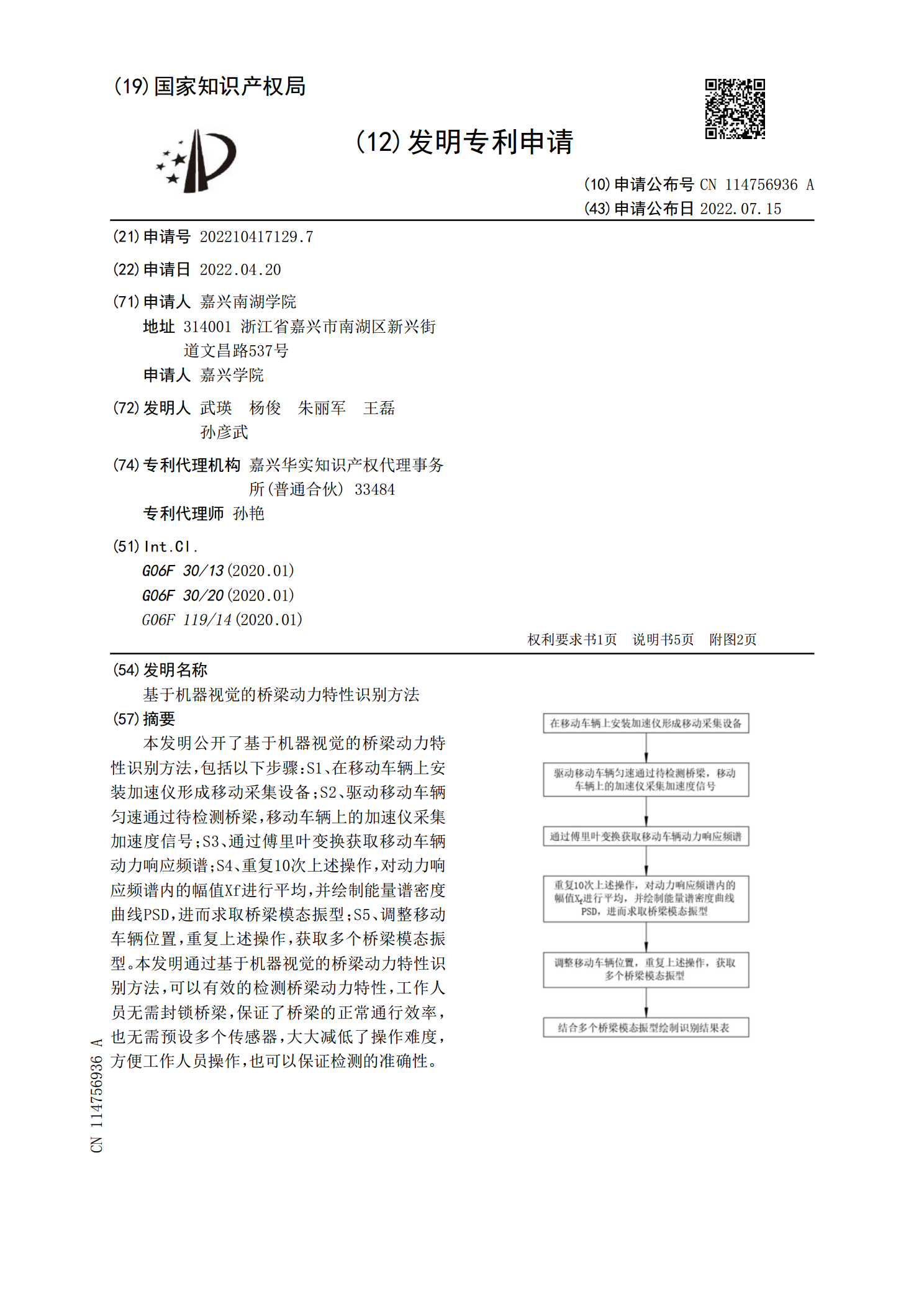
本发明公开了基于机器视觉的桥梁动力特性识别方法,包括以下步骤:S1、在移动车辆上安装加速仪形成移动采集设备;S2、驱动移动车辆匀速通过待检测桥梁,移动车辆上的加速仪采集加速度信号;S3、通过傅里叶变换获取移动车辆动力响应频谱;S4、重复10次上述操作,对动力响应频谱内的幅值Xf进行平均,并绘制能量谱密度曲线PSD,进而求取桥梁模态振型;S5、调整移动车辆位置,重复上述操作,获取多个桥梁模态振型。本发明通过基于机器视觉的桥梁动力特性识别方法,可以有效的检测桥梁动力特性,工作人员无需封锁桥梁,保证了桥梁的正常