
基于冠层反射光谱的茶树营养状况快速诊断方法.pdf

冷霜****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于冠层反射光谱的茶树营养状况快速诊断方法.pdf
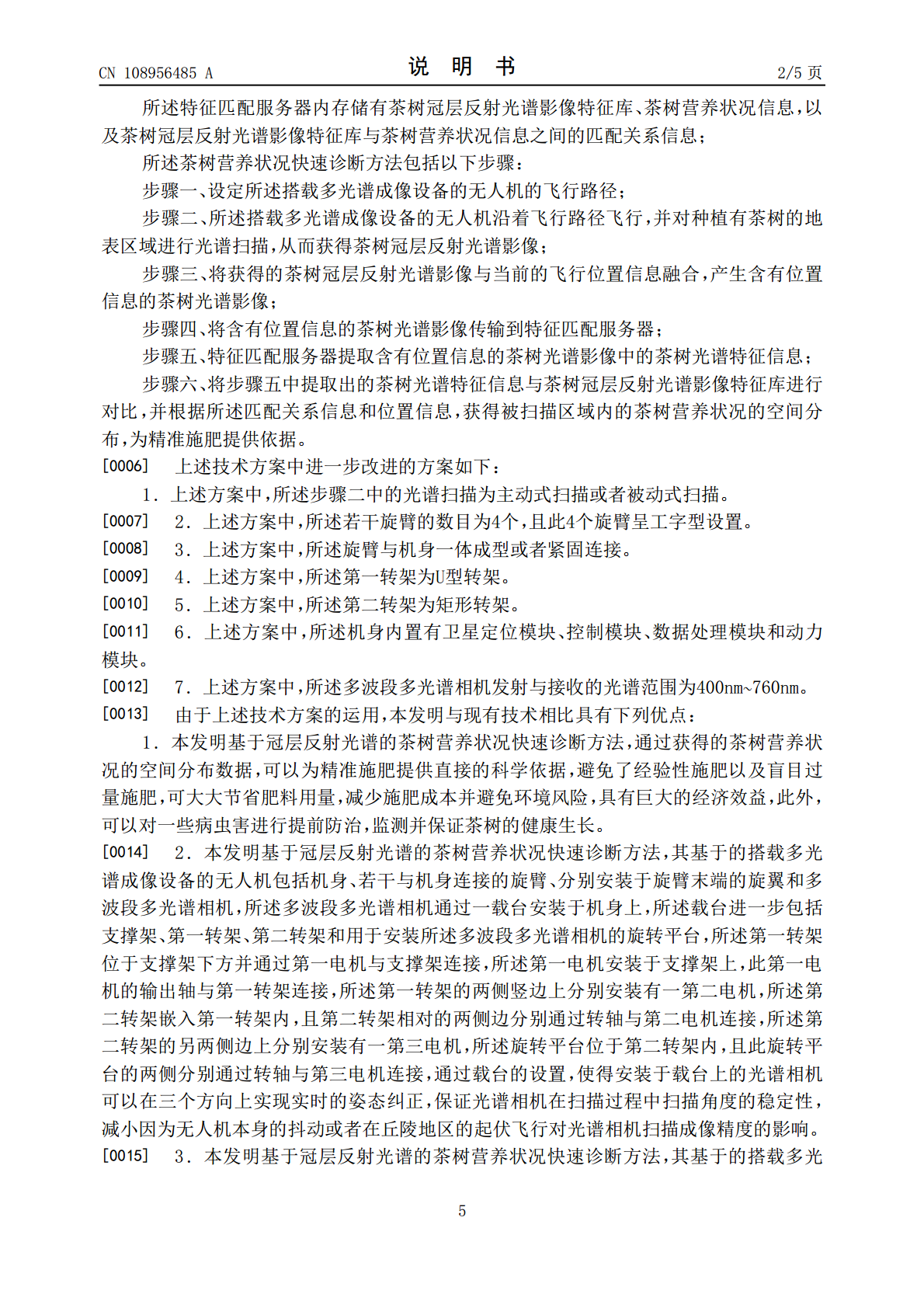
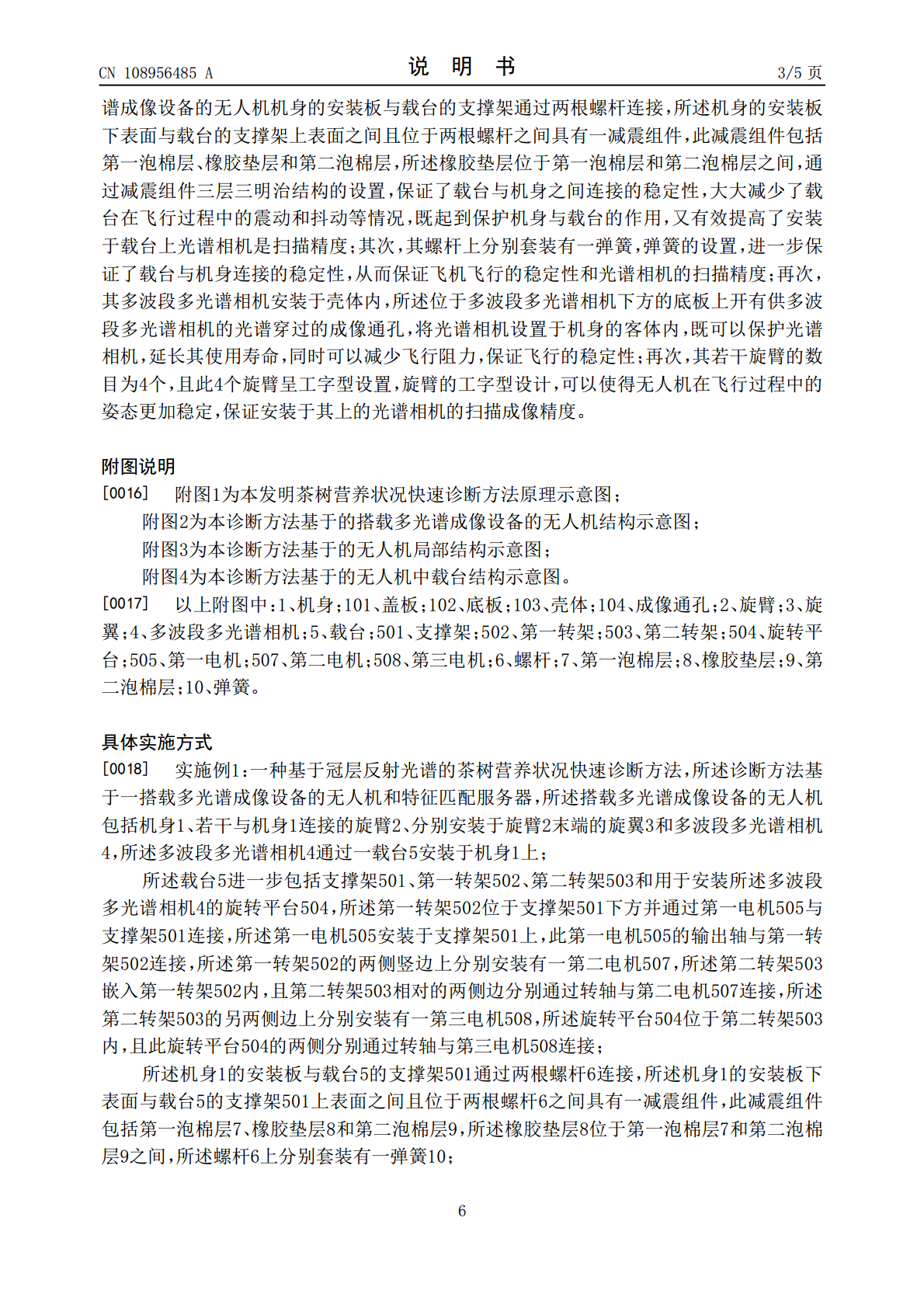
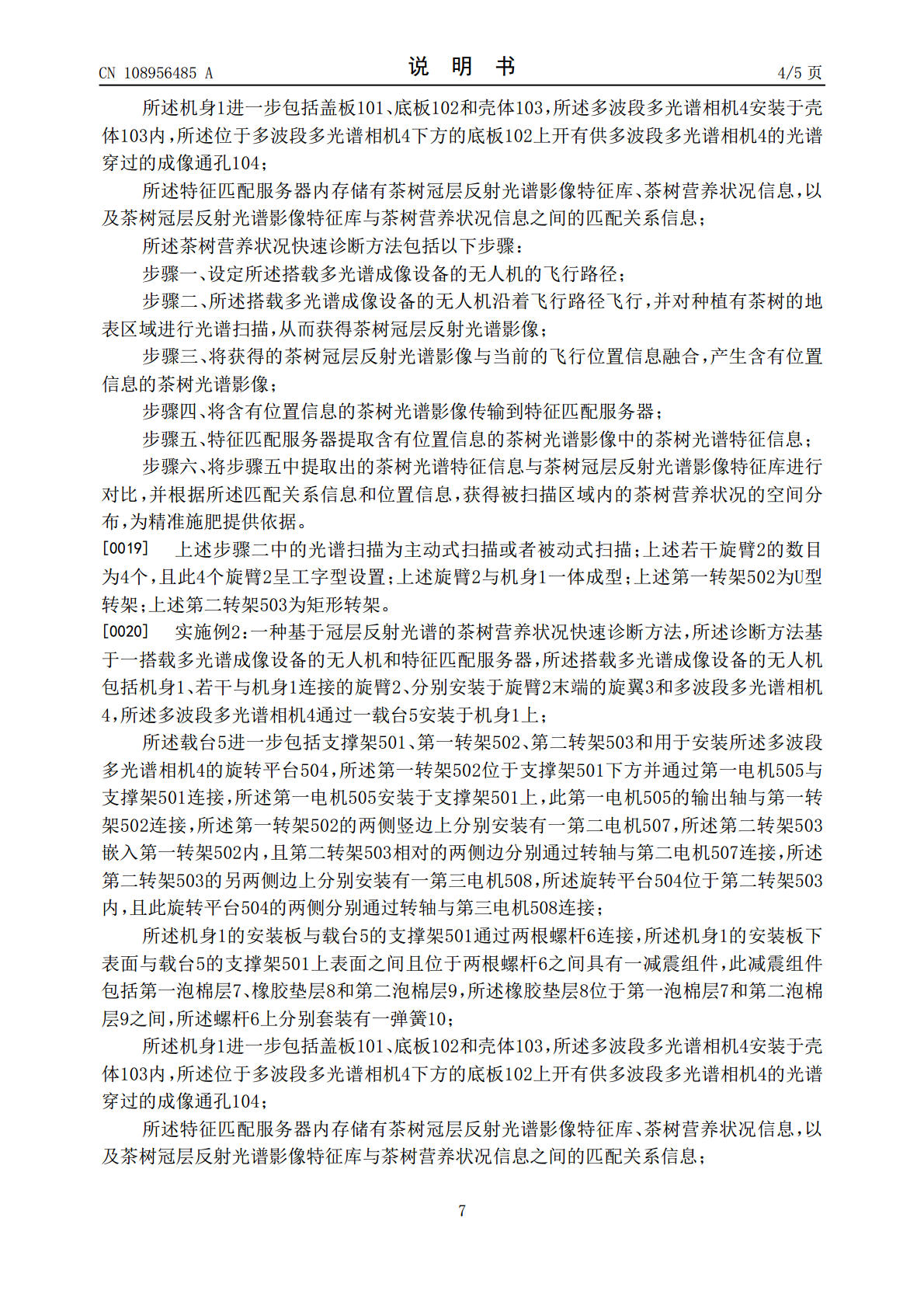
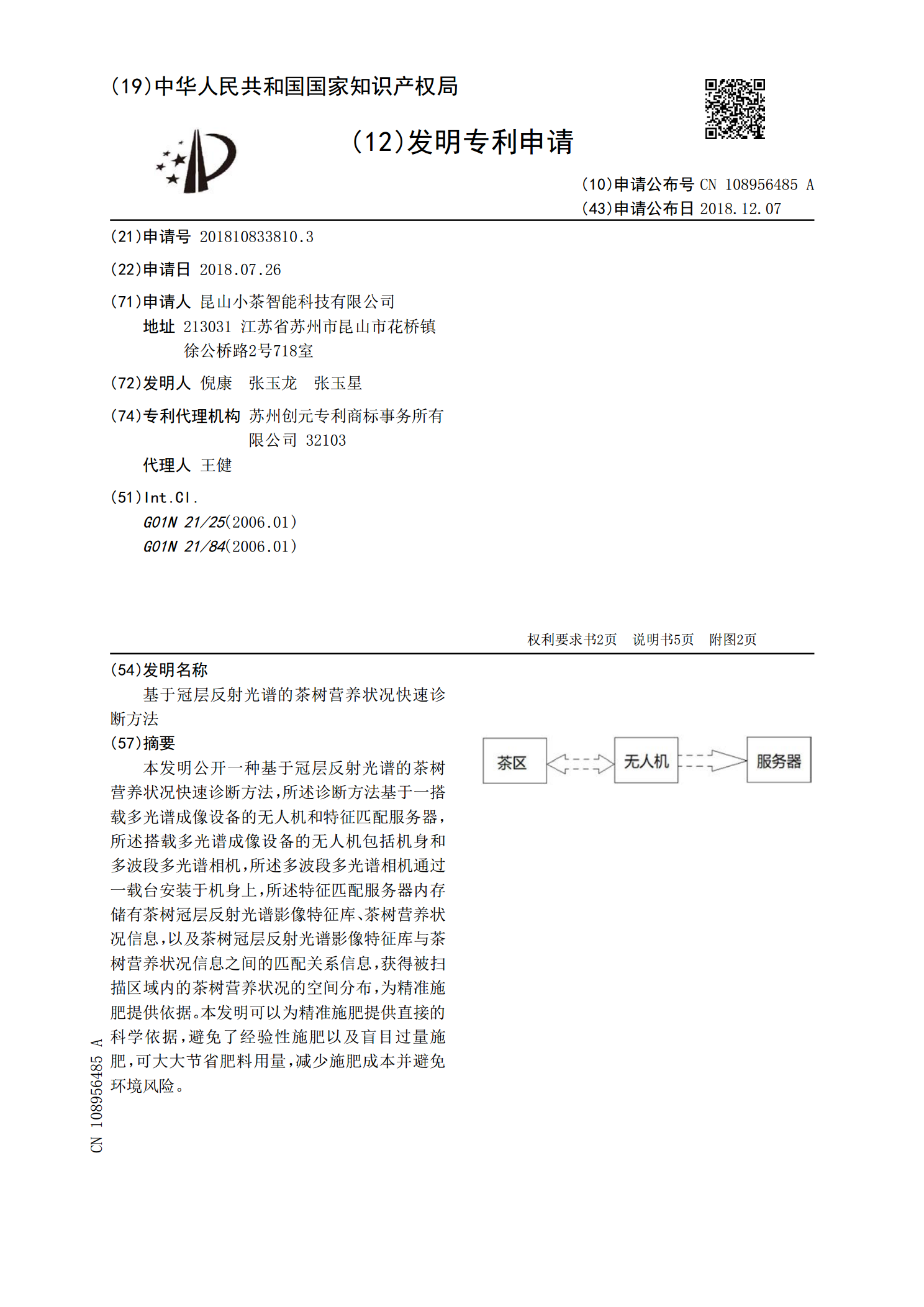
本发明公开一种基于冠层反射光谱的茶树营养状况快速诊断方法,所述诊断方法基于一搭载多光谱成像设备的无人机和特征匹配服务器,所述搭载多光谱成像设备的无人机包括机身和多波段多光谱相机,所述多波段多光谱相机通过一载台安装于机身上,所述特征匹配服务器内存储有茶树冠层反射光谱影像特征库、茶树营养状况信息,以及茶树冠层反射光谱影像特征库与茶树营养状况信息之间的匹配关系信息,获得被扫描区域内的茶树营养状况的空间分布,为精准施肥提供依据。本发明可以为精准施肥提供直接的科学依据,避免了经验性施肥以及盲目过量施肥,可大大节省肥
一种基于冠层反射光谱的茶树品种识别方法.pdf
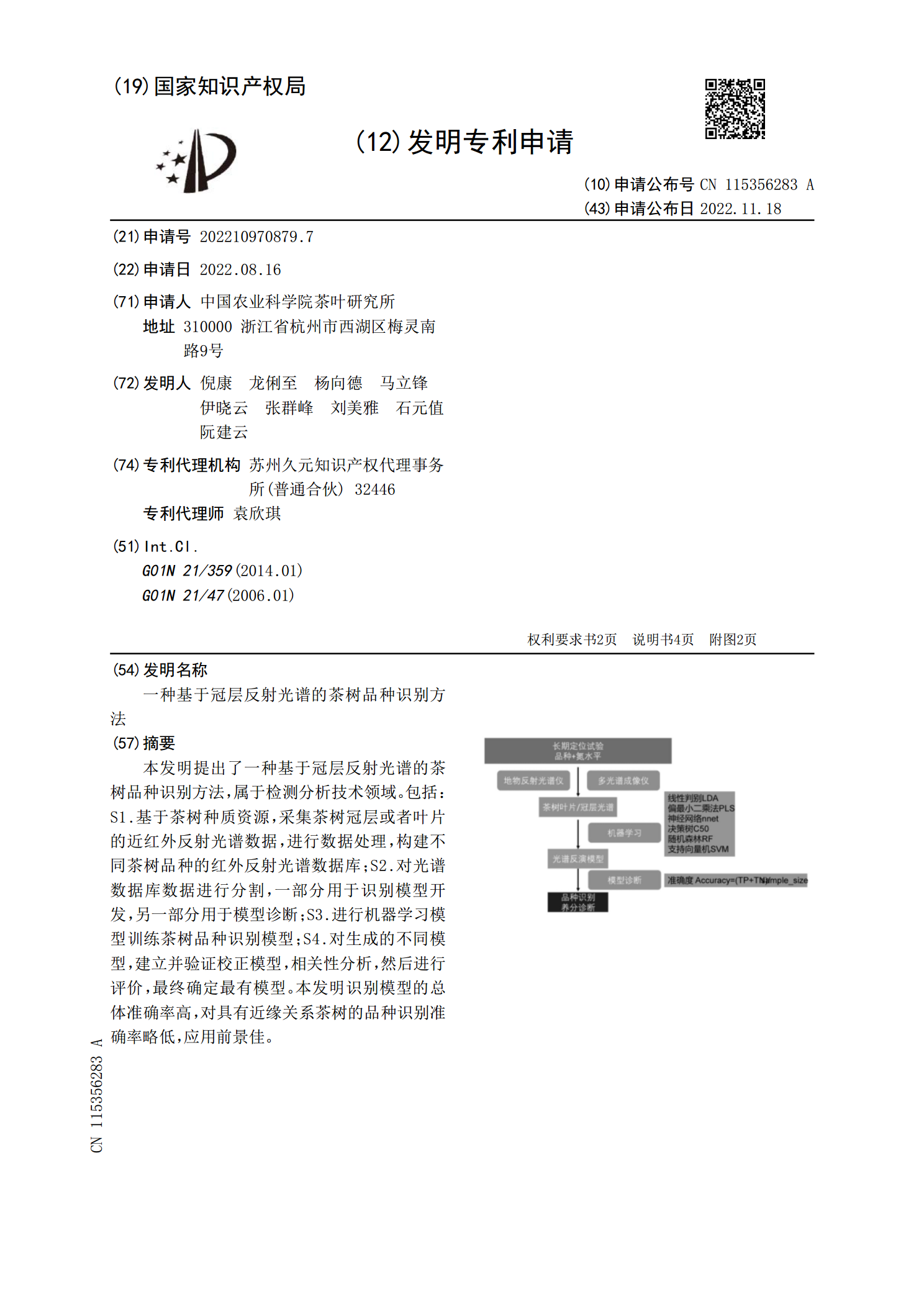
本发明提出了一种基于冠层反射光谱的茶树品种识别方法,属于检测分析技术领域。包括:S1.基于茶树种质资源,采集茶树冠层或者叶片的近红外反射光谱数据,进行数据处理,构建不同茶树品种的红外反射光谱数据库;S2.对光谱数据库数据进行分割,一部分用于识别模型开发,另一部分用于模型诊断;S3.进行机器学习模型训练茶树品种识别模型;S4.对生成的不同模型,建立并验证校正模型,相关性分析,然后进行评价,最终确定最有模型。本发明识别模型的总体准确率高,对具有近缘关系茶树的品种识别准确率略低,应用前景佳。
一种基于叶片反射光谱的茶树氮素营养快速诊断技术.pdf
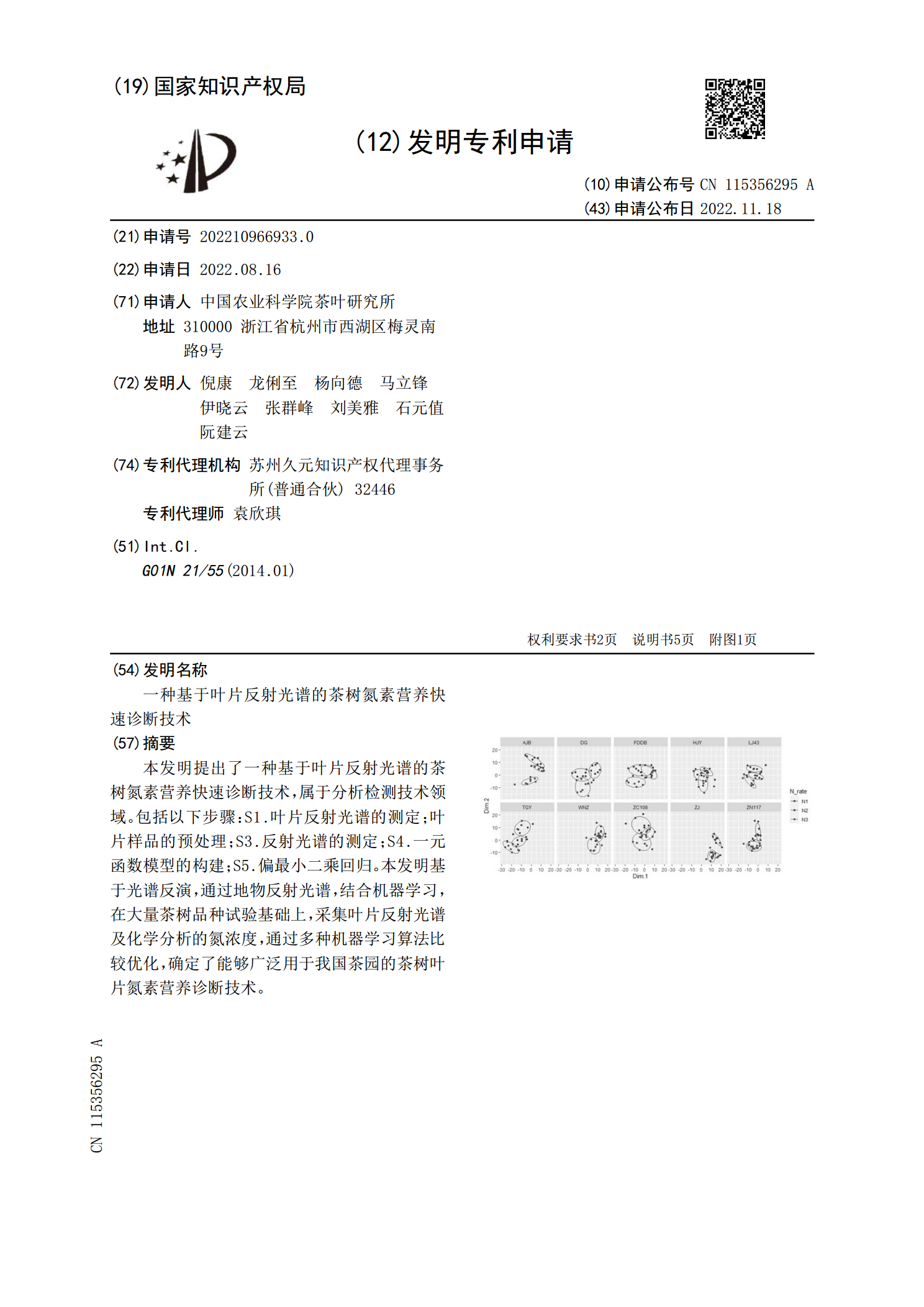
本发明提出了一种基于叶片反射光谱的茶树氮素营养快速诊断技术,属于分析检测技术领域。包括以下步骤:S1.叶片反射光谱的测定;叶片样品的预处理;S3.反射光谱的测定;S4.一元函数模型的构建;S5.偏最小二乘回归。本发明基于光谱反演,通过地物反射光谱,结合机器学习,在大量茶树品种试验基础上,采集叶片反射光谱及化学分析的氮浓度,通过多种机器学习算法比较优化,确定了能够广泛用于我国茶园的茶树叶片氮素营养诊断技术。

水稻冠层叶片氮素分布变化及氮营养状况快速诊断.docx
水稻冠层叶片氮素分布变化及氮营养状况快速诊断摘要本文研究了水稻冠层叶片氮素分布变化及氮营养状况的快速诊断方法。通过采集不同龄期水稻叶片,利用原子吸收分光光度法分析其氮素含量。结果显示,水稻叶片氮素含量在不同龄期存在显著差异,早期叶片氮素含量较低,后期叶片氮素含量逐渐增加。此外,利用植株叶绿素含量和叶片氮素含量的比值,可以快速诊断水稻氮营养状况,为精准施肥提供科学依据。关键词:水稻;冠层叶片;氮素分布;氮营养诊断AbstractThispaperstudiesthenitrogendistributiona

基于冠层反射光谱的夏玉米氮素营养与生长监测研究.docx
基于冠层反射光谱的夏玉米氮素营养与生长监测研究摘要夏玉米是我国重要的粮食作物之一,如何提高夏玉米的产量和质量是当前研究的重要课题。氮素营养是影响夏玉米生长和发育的重要因素之一。本研究利用冠层反射光谱技术对夏玉米氮素营养和生长进行了监测和研究。结果表明,利用冠层反射光谱技术可以有效地监测夏玉米的氮素营养状况和生长状态,为夏玉米的健康生长和高产提供了重要的支持和依据。关键词:夏玉米;氮素营养;冠层反射光谱;生长监测引言夏玉米是我国的重要粮食作物之一,是保障国家粮食安全的主要来源之一。夏玉米的生长和发育受多种因