
一种三目视觉手语识别装置及多信息融合手语识别方法.pdf

长春****主a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三目视觉手语识别装置及多信息融合手语识别方法.pdf
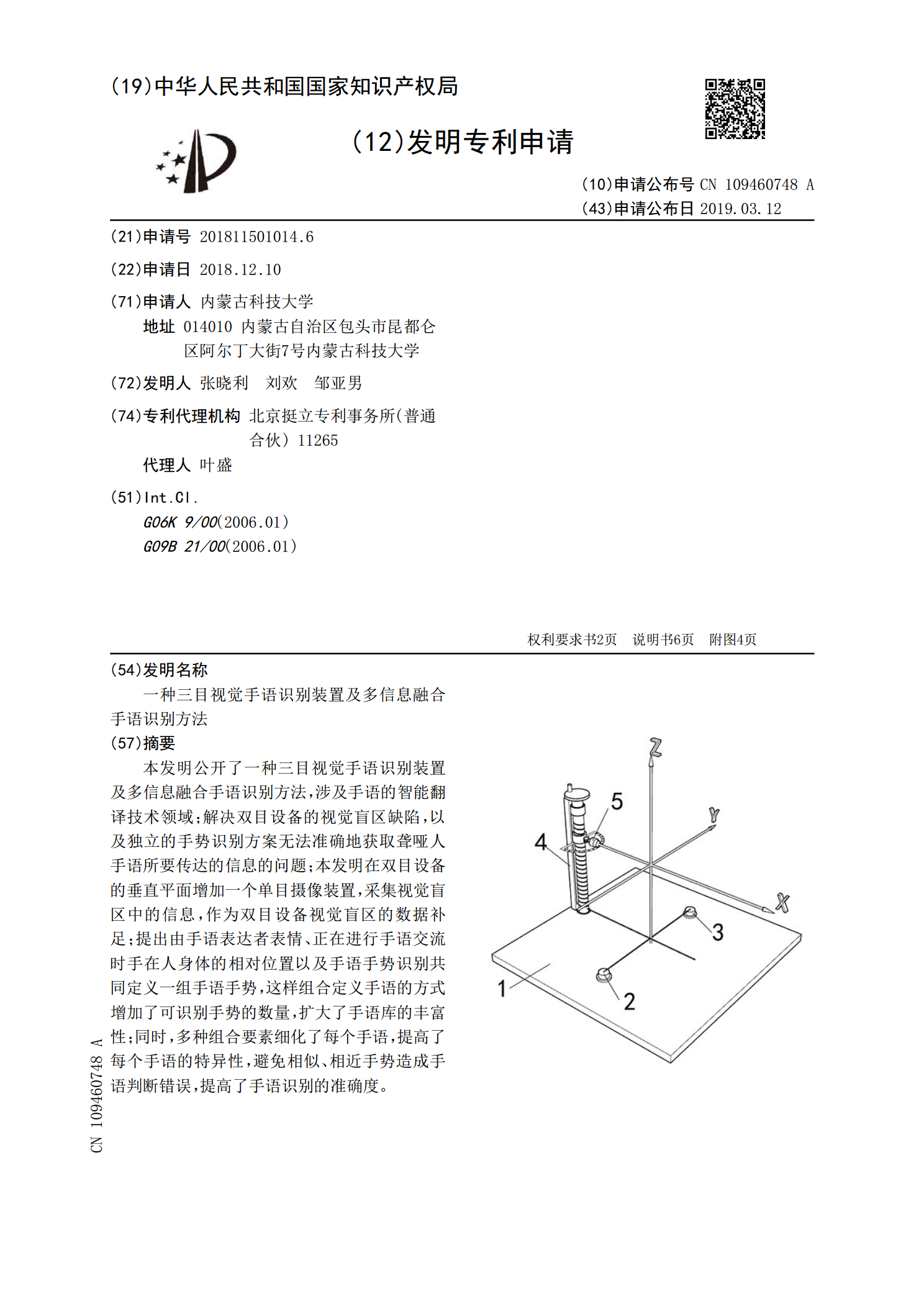
本发明公开了一种三目视觉手语识别装置及多信息融合手语识别方法,涉及手语的智能翻译技术领域;解决双目设备的视觉盲区缺陷,以及独立的手势识别方案无法准确地获取聋哑人手语所要传达的信息的问题;本发明在双目设备的垂直平面增加一个单目摄像装置,采集视觉盲区中的信息,作为双目设备视觉盲区的数据补足;提出由手语表达者表情、正在进行手语交流时手在人身体的相对位置以及手语手势识别共同定义一组手语手势,这样组合定义手语的方式增加了可识别手势的数量,扩大了手语库的丰富性;同时,多种组合要素细化了每个手语,提高了每个手语的特异性

改进的多特征融合手语字母识别方法.docx
改进的多特征融合手语字母识别方法Abstract:手语是一种较为独特的交流方式,对于成为一个手语专家来说,了解并熟练掌握手语字母是必不可少的。因此,在这里,我们提出了一种改进的多特征融合手语字母识别方法,旨在提高手语字母识别准确率。本文基于手语数据集,在卷积神经网络的基础上,引入多种特征融合的方法,以增强分类效果和提高识别准确率。实验结果表明,本文提出的方法在手语字母识别准确率上,相比于传统方法有了显著提升。本文的方法对于提高手语学习效率和交流质量具有重要意义。Keywords:手语字母识别;卷积神经网络

融合面部信息的手语识别方法研究的综述报告.docx
融合面部信息的手语识别方法研究的综述报告手语是一种用手部动作、手指姿势、面部表情和身体语言等非语言符号来表示文字语言的传递信息方式。随着信息技术的发展,手语识别技术越来越成熟,并且被广泛应用于辅助残疾人的交流和翻译。但是,仅仅通过手部动作的识别往往不能够获得完整的信息,因此就有了融合面部信息的手语识别方法。融合面部信息的手语识别方法是指综合使用手部动作、面部表情和语音等信息来实现手语识别的方法。其中,面部信息包括眼睛、嘴唇和其他面部神经肌肉的动作。在手语传达信息的过程中,面部信息往往扮演着非常重要的角色。

一种连续手语的识别方法及其装置.pdf
本发明提供了一种连续手语的识别方法及其装置,包括Kinect拍摄模块,Kinect拍摄模块包括深度图像存储单元和彩色图像存储单元;目标手形分割单元,对彩色图像和深度图像进行处理,得到图像中的目标手形部分;特征整合单元,对目标手形部分的几何特征和轮廓特征进行整合,得到手语特征序列;匹配模块,将手语特征序列与手语模板库中的手语模板进行对比识别,得到与待识别连续手语识别相匹配的连续手语模板,并输出连续手续模板的含义。该装置能够通过上述方法实现连续手语的识别,提高了手语识别的准确率。

一种连续手语识别方法.pdf
本发明一种连续手语识别方法,涉及用于识别图形的记录载体的处理,是基于对多模态图像序列特征融合和自注意力机制的编码解码网络的连续手语识别的方法,首先获得光流图像序列,通过原始手语图像序列和光流图像序列时空特征的提取和多模态图像序列时空特征融合,和手语句子标签的文本特征序列的提取,将融合后的多模态图像序列时空特征和提取的手语句子标签的文本特征序列输入到基于自注意力机制的编码解码网络中进行手语标签预测输出,克服了现有技术存在的特征单一、视频需要分割的缺陷。