
一种超声探头校准方法.pdf

斌斌****公主


1/10
2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种超声探头校准方法.pdf
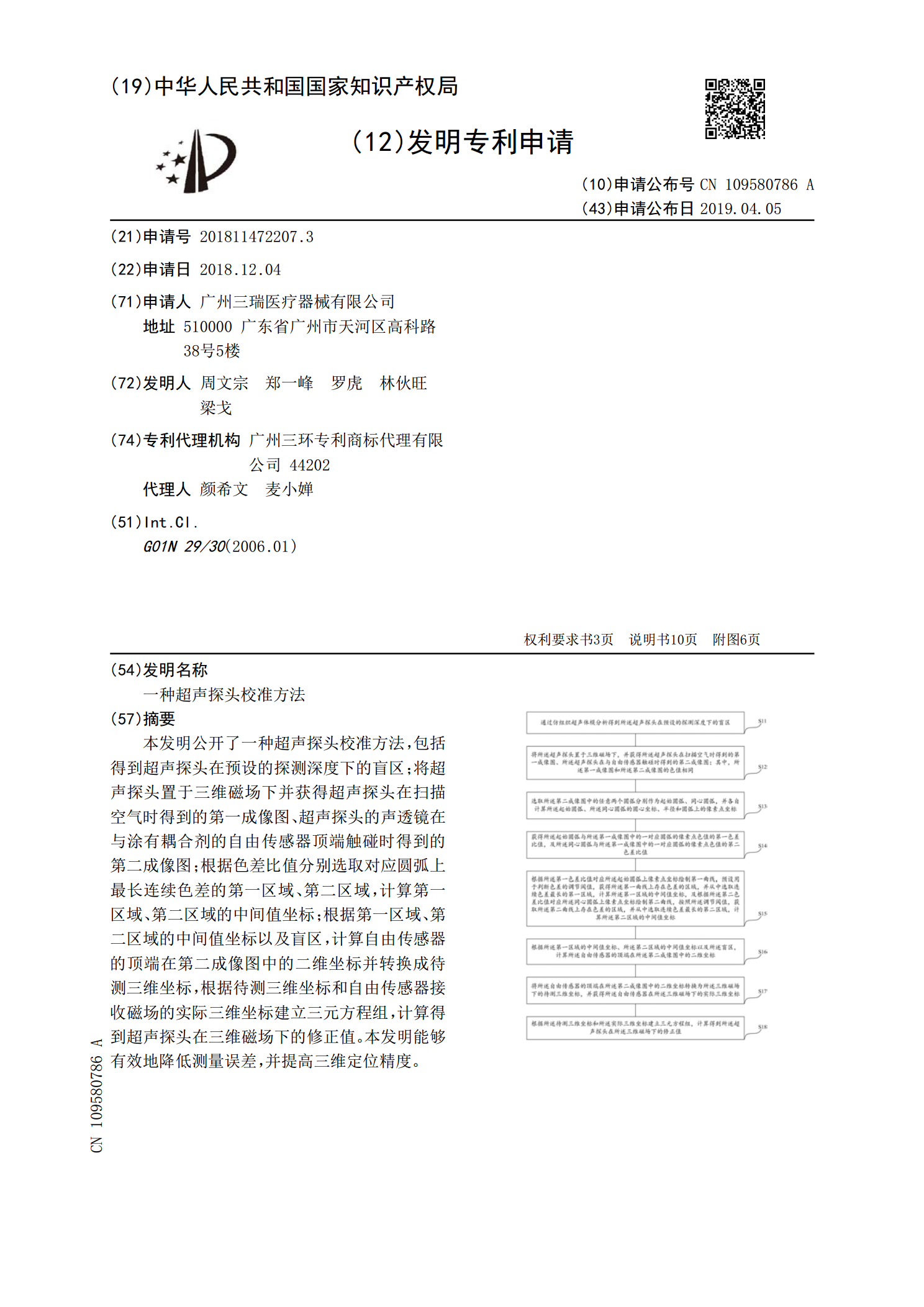
本发明公开了一种超声探头校准方法,包括得到超声探头在预设的探测深度下的盲区;将超声探头置于三维磁场下并获得超声探头在扫描空气时得到的第一成像图、超声探头的声透镜在与涂有耦合剂的自由传感器顶端触碰时得到的第二成像图;根据色差比值分别选取对应圆弧上最长连续色差的第一区域、第二区域,计算第一区域、第二区域的中间值坐标;根据第一区域、第二区域的中间值坐标以及盲区,计算自由传感器的顶端在第二成像图中的二维坐标并转换成待测三维坐标,根据待测三维坐标和自由传感器接收磁场的实际三维坐标建立三元方程组,计算得到超声探头在三
活塞发声装置、探头校准装置及其校准探头的方法.pdf
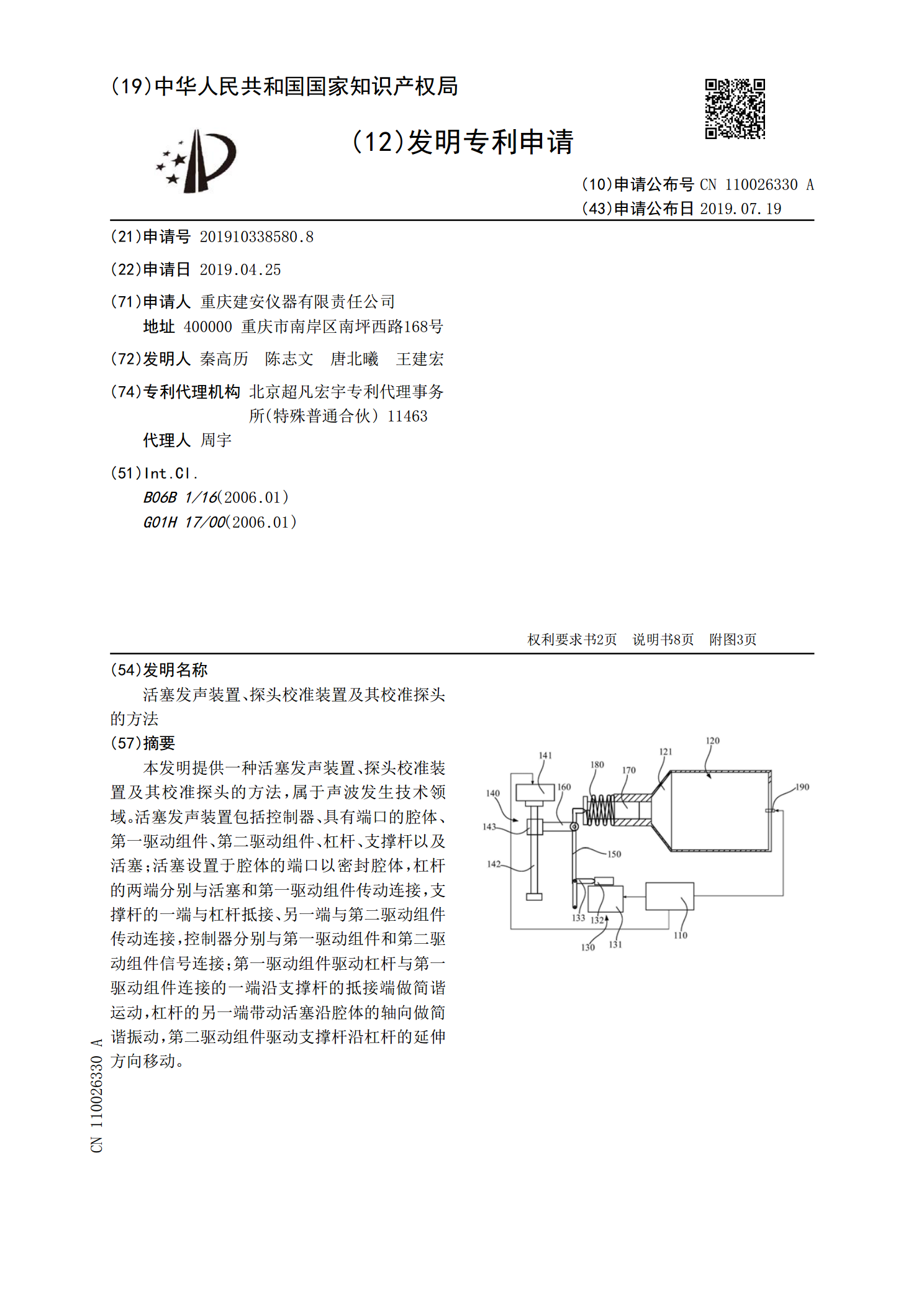
本发明提供一种活塞发声装置、探头校准装置及其校准探头的方法,属于声波发生技术领域。活塞发声装置包括控制器、具有端口的腔体、第一驱动组件、第二驱动组件、杠杆、支撑杆以及活塞;活塞设置于腔体的端口以密封腔体,杠杆的两端分别与活塞和第一驱动组件传动连接,支撑杆的一端与杠杆抵接、另一端与第二驱动组件传动连接,控制器分别与第一驱动组件和第二驱动组件信号连接;第一驱动组件驱动杠杆与第一驱动组件连接的一端沿支撑杆的抵接端做简谐运动,杠杆的另一端带动活塞沿腔体的轴向做简谐振动,第二驱动组件驱动支撑杆沿杠杆的延伸方向移动。
超声探头和制造该超声探头的方法.pdf
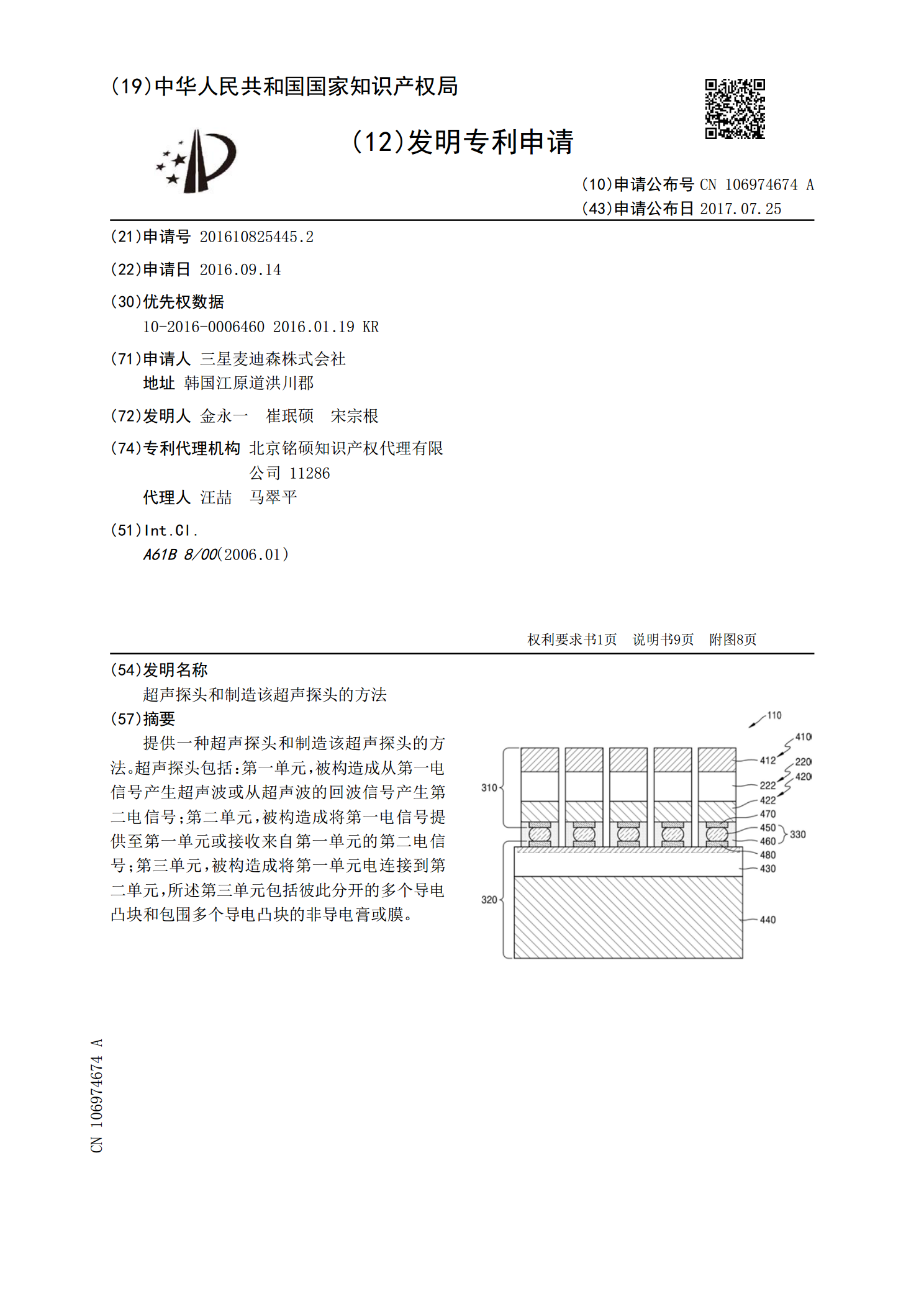
提供一种超声探头和制造该超声探头的方法。超声探头包括:第一单元,被构造成从第一电信号产生超声波或从超声波的回波信号产生第二电信号;第二单元,被构造成将第一电信号提供至第一单元或接收来自第一单元的第二电信号;第三单元,被构造成将第一单元电连接到第二单元,所述第三单元包括彼此分开的多个导电凸块和包围多个导电凸块的非导电膏或膜。

一种超声探头、超声探头电缆线和面阵超声探头.pdf
一种超声探头、超声探头电缆线和面阵超声探头,超声探头包括声头、散热体和电缆线,散热体的一端与声头连接,电缆线包括由内向外分布的同轴线、缠绕带、屏蔽层和外皮,电缆线还包括导热层,导热层被包裹在外皮内,同轴线与声头连接,导热层与散热体的另一端连接。由于电缆线内设有导热层,电缆线内的导热层可将声头产生的热量快速传导至超声探头的插座端,并通过插座端与周围环境和整机进行热交换实现散热,从而本超声探头电缆线具有良好的导热效果,结构简单稳定,超声探头具有良好的散热效果,避免了声头发烫。

一种超声探头及面阵超声探头.pdf
一种超声探头及面阵超声探头,超声探头包括压电层和背衬块,压电层和背衬块之间设有第一散热块,由于在压电层和背衬块之间设有第一散热块,第一散热块贴合在压电层上,接触面积大,第一散热块与压电层中部和四周的热交换充分,使得本超声探头的散热效果好,能够保证超声探头长时间使用过程中仍处于低温状态。