
基于压缩感知的自适应确定稀疏度的信号重构方法.pdf

Jo****31

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于压缩感知的自适应确定稀疏度的信号重构方法.pdf
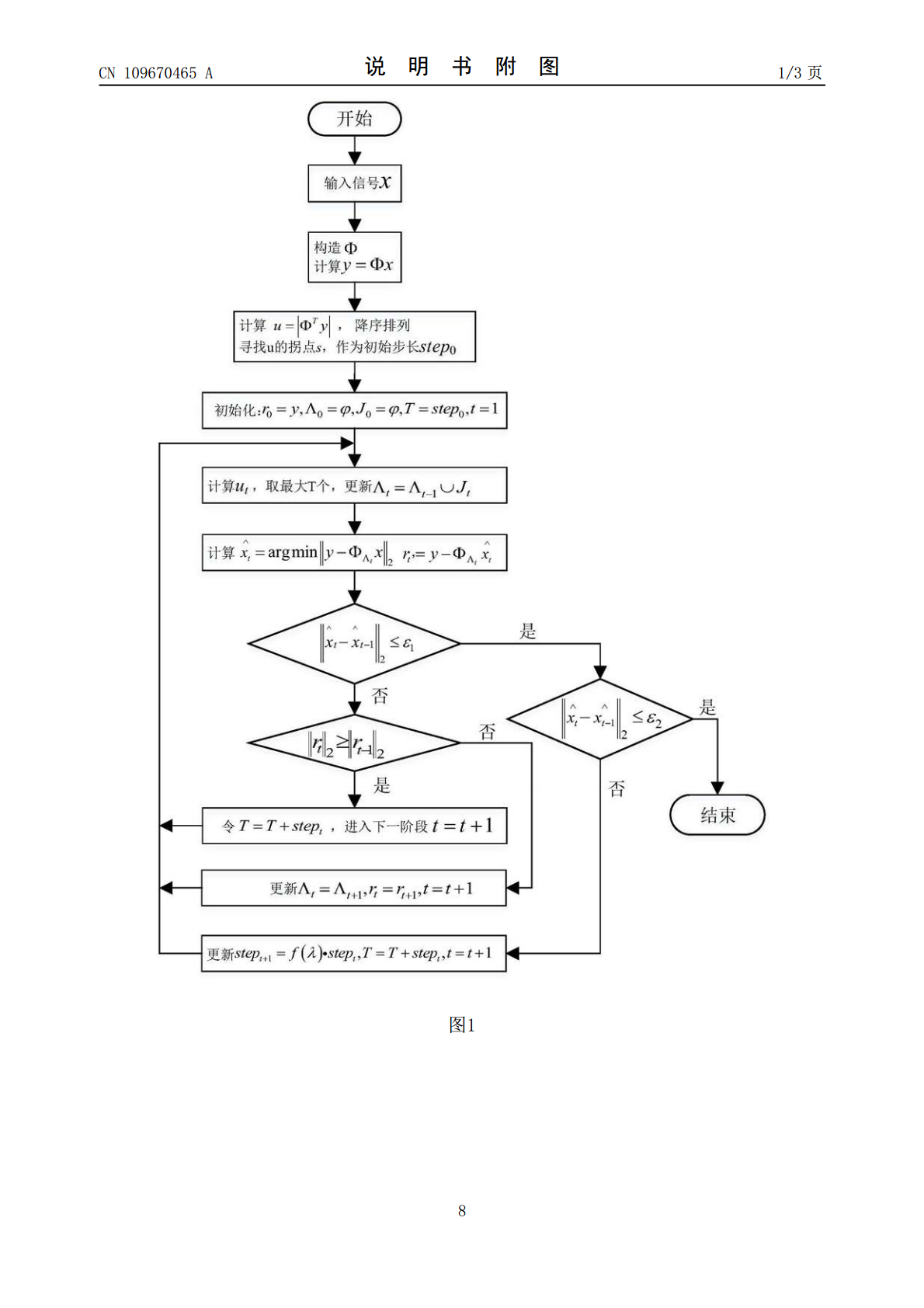
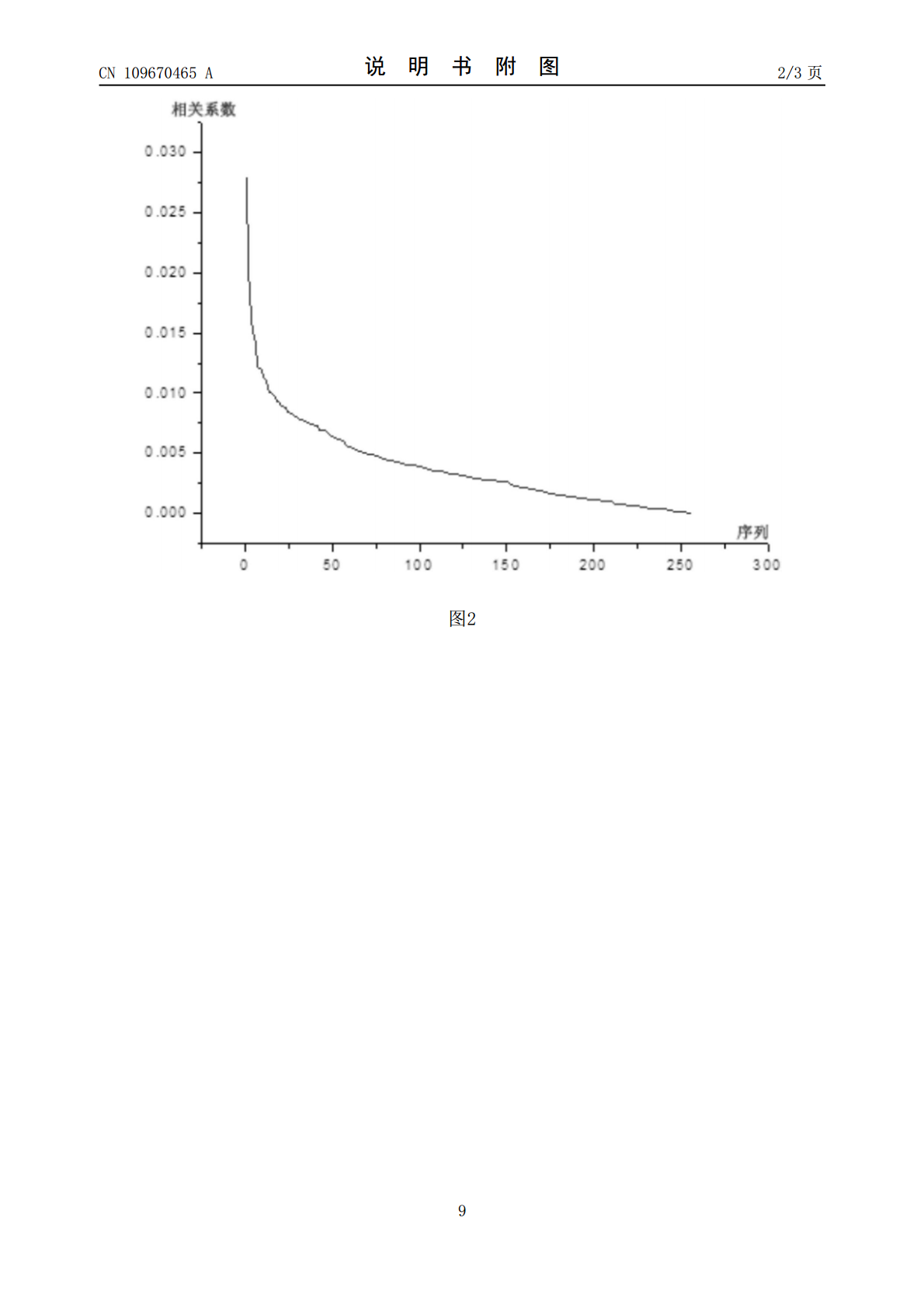
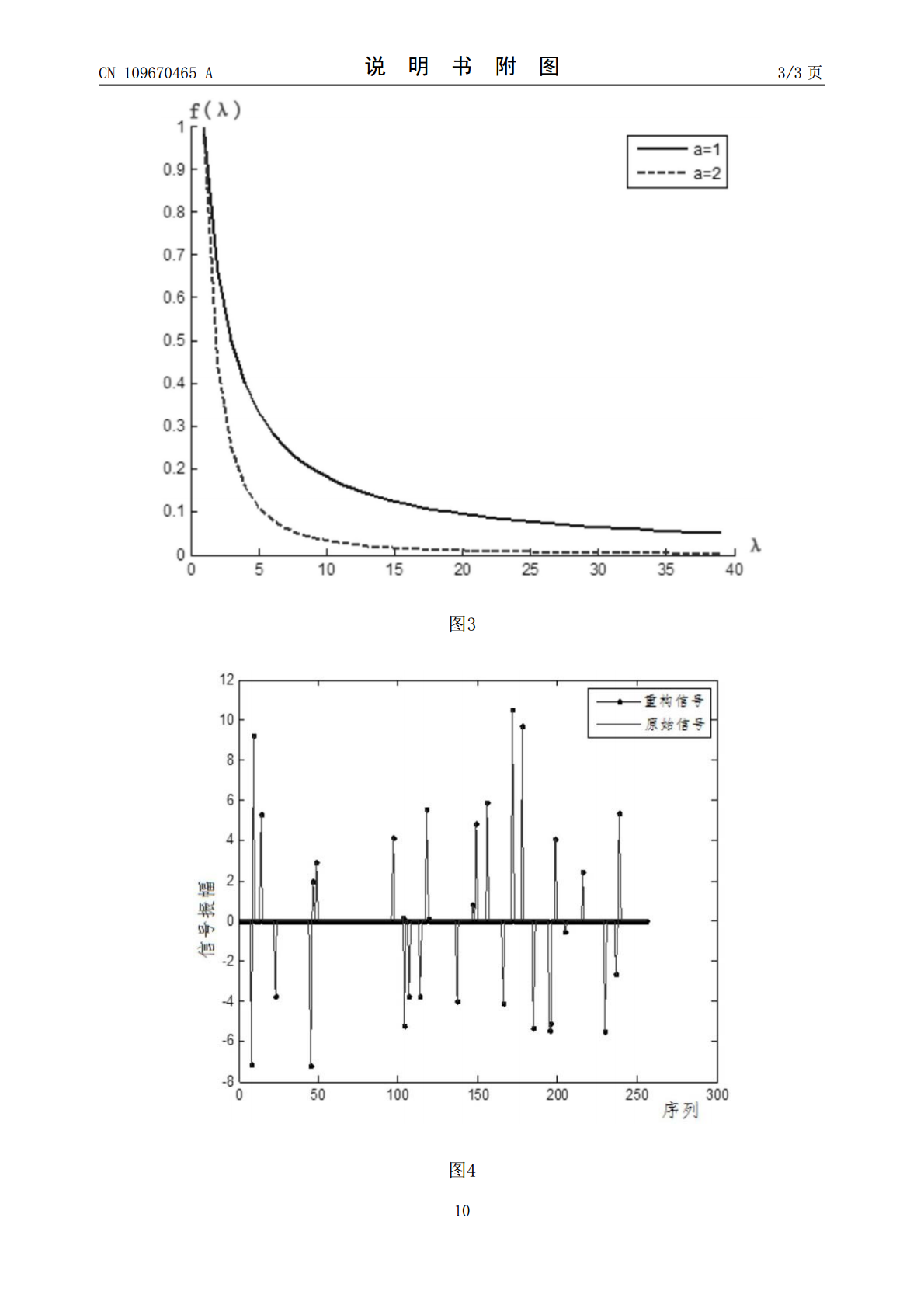
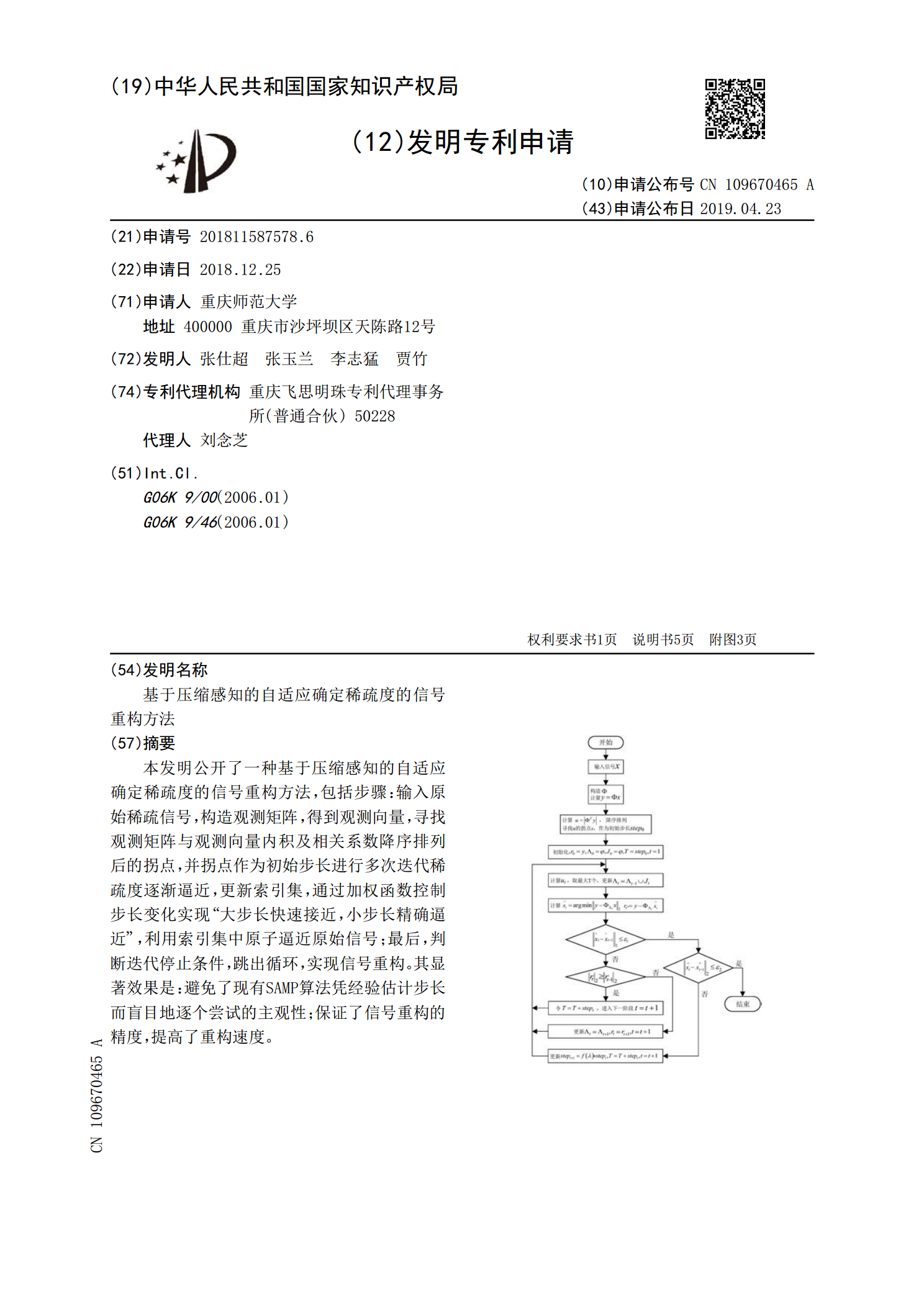
本发明公开了一种基于压缩感知的自适应确定稀疏度的信号重构方法,包括步骤:输入原始稀疏信号,构造观测矩阵,得到观测向量,寻找观测矩阵与观测向量内积及相关系数降序排列后的拐点,并拐点作为初始步长进行多次迭代稀疏度逐渐逼近,更新索引集,通过加权函数控制步长变化实现“大步长快速接近,小步长精确逼近”,利用索引集中原子逼近原始信号;最后,判断迭代停止条件,跳出循环,实现信号重构。其显著效果是:避免了现有SAMP算法凭经验估计步长而盲目地逐个尝试的主观性;保证了信号重构的精度,提高了重构速度。

基于稀疏度自适应算法的压缩感知.docx
基于稀疏度自适应算法的压缩感知基于稀疏度自适应算法的压缩感知摘要:随着现代社会对数据传输和存储的需求不断增长,压缩感知技术作为一种新型的信号采集和重构方法逐渐受到广泛关注。为了提高传感器采样效率和减少数据传输和存储开销,本论文提出了一种基于稀疏度自适应算法的压缩感知方法。该方法通过适应信号的稀疏度进行采样和重构,能够有效地降低传感器采样率并保持较好的重构质量。通过实验验证,该方法在不同类型信号的采样和重构中均取得了良好的性能。1.引言对于传统的信号采样方法,在传输和存储过程中往往存在大量冗余数据,这不仅会

贝叶斯压缩感知稀疏信号重构方法研究.docx
贝叶斯压缩感知稀疏信号重构方法研究贝叶斯压缩感知稀疏信号重构方法研究摘要:随着信息技术的发展,数据量的爆炸式增长对信息传输和存储提出了巨大的挑战。同时,由于传感器的限制和实际应用的需要,获取的原始数据一般都是高维稀疏信号。为了有效地传输和存储这些信号,压缩感知理论应运而生。本文研究了基于贝叶斯压缩感知的稀疏信号重构方法,用于恢复原始信号。实验结果表明,该方法在高维稀疏信号重构中具有较好的性能。关键词:贝叶斯压缩感知;稀疏信号;重构方法1.引言在当今信息技术高速发展的时代,信息传输和存储面临着越来越大的挑战

基于压缩感知的心电信号稀疏采样与重构算法.docx
基于压缩感知的心电信号稀疏采样与重构算法基于压缩感知的心电信号稀疏采样与重构算法摘要:心电信号是评估和诊断心脏疾病的重要指标之一。由于心电信号在采集和传输过程中的大数据量和高频率特性,引发了对心电信号的有效压缩和重构方法的需求。本论文基于压缩感知理论,提出了一种心电信号稀疏采样与重构算法。该算法通过选取心电信号中的部分重要样本,可实现在较低采样率下完成心电信号的重构,从而减少了传输和存储的资源消耗,并在一定程度上保持了重构信号的准确性。关键词:心电信号,压缩感知,稀疏采样,重构算法1.引言心电信号是通过记

基于块稀疏信号的正则化自适应压缩感知算法.docx
基于块稀疏信号的正则化自适应压缩感知算法基于块稀疏信号的正则化自适应压缩感知算法摘要:压缩感知(CompressedSensing,CS)是一种新兴的信号处理理论,旨在通过稀疏信号重建来减少数据传输和存储空间的需求。然而,传统的压缩感知算法由于信号的稀疏性假设不合理,导致对非稀疏信号的重建效果不佳。为了改进这一问题,本文基于块稀疏信号的特点提出了一种正则化自适应压缩感知算法,通过引入正则化项来增加信号的稀疏性并优化重建结果。关键词:压缩感知、块稀疏信号、正则化、自适应、重建效果1.引言压缩感知是一种利用信