
一种植株表型参数测量装置、方法及系统.pdf

思洁****爱吗

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种植株表型参数测量装置、方法及系统.pdf
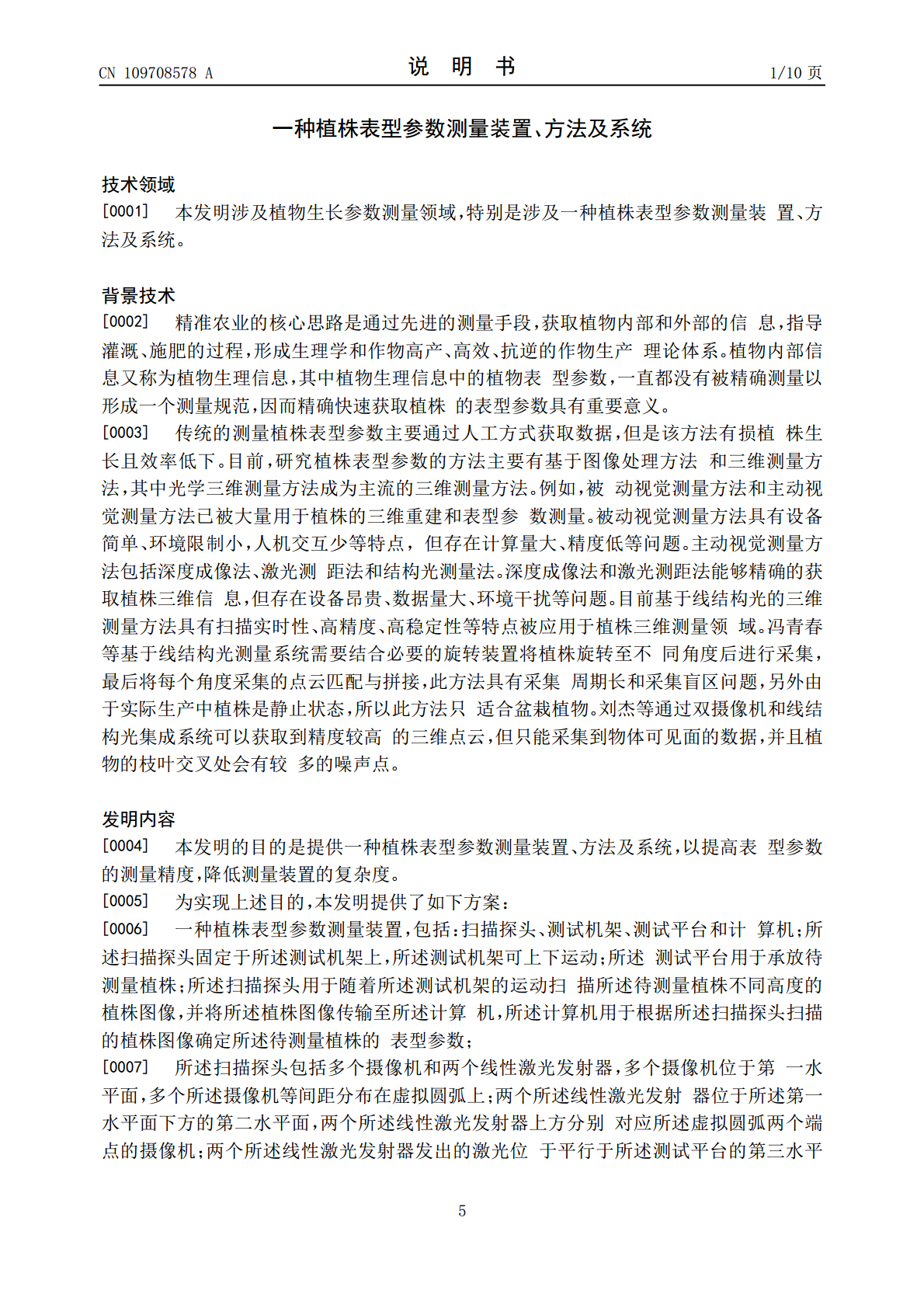
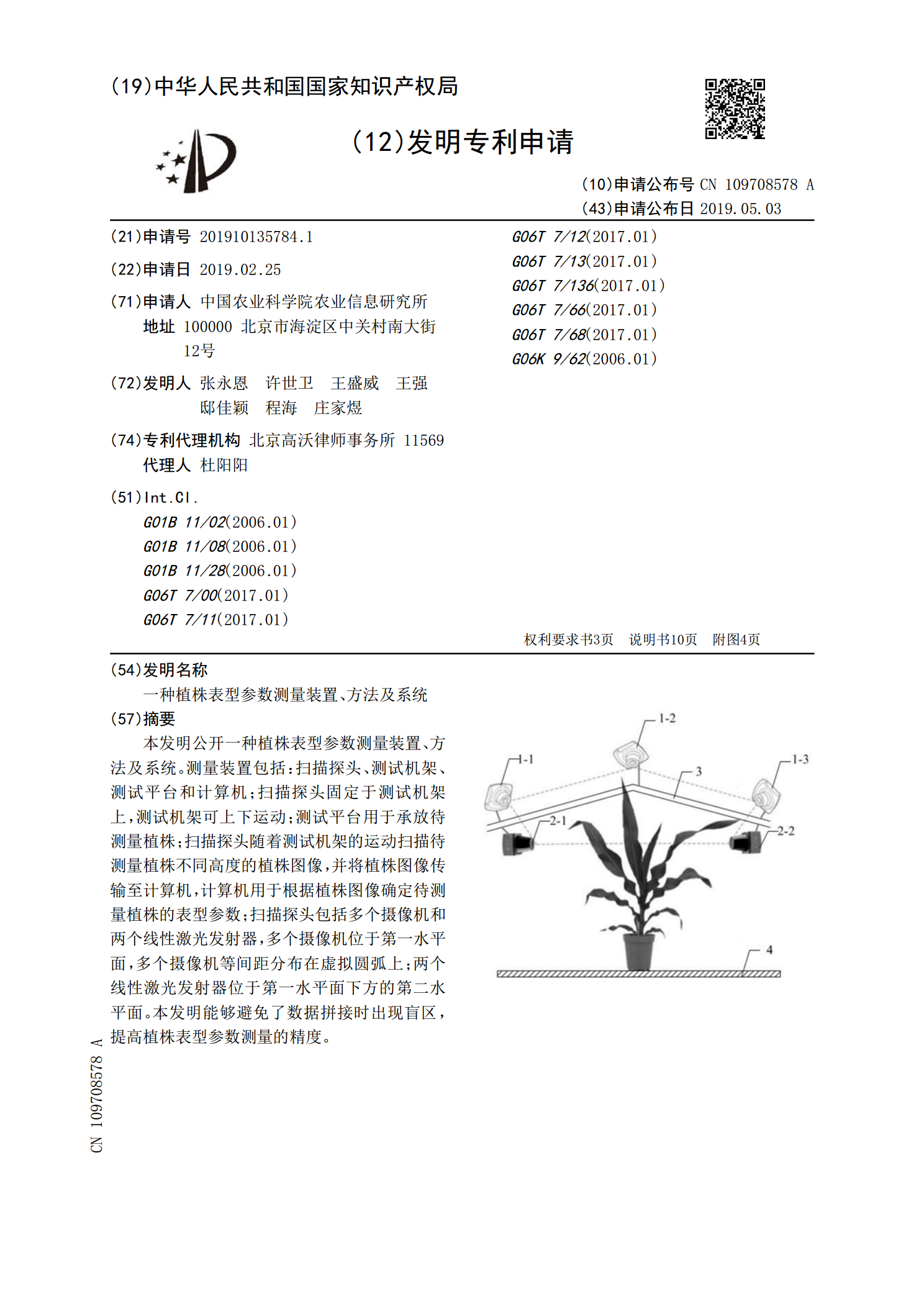
本发明公开一种植株表型参数测量装置、方法及系统。测量装置包括:扫描探头、测试机架、测试平台和计算机;扫描探头固定于测试机架上,测试机架可上下运动;测试平台用于承放待测量植株;扫描探头随着测试机架的运动扫描待测量植株不同高度的植株图像,并将植株图像传输至计算机,计算机用于根据植株图像确定待测量植株的表型参数;扫描探头包括多个摄像机和两个线性激光发射器,多个摄像机位于第一水平面,多个摄像机等间距分布在虚拟圆弧上;两个线性激光发射器位于第一水平面下方的第二水平面。本发明能够避免了数据拼接时出现盲区,提高植株表型

基于计算机视觉的植株表型测量方法、系统及装置.pdf
本发明公开一种基于计算机视觉的植株表型测量方法、系统及装置,方法包括获取原始植株图像进行校正处理,再进行分割处理,得到植株二值图;基于植株二值图得到骨架拓扑结构图像,进而获取植株的相关信息;将各个叶片从叶柄与茎秆连接处进行分离得到各个叶片的轮廓信息,结合骨架拓扑结构得到植株叶片表型信息;获取茎秆二值图,得到茎秆表型信息。本发明通过采集植株图像信息进行图像处理,获得植株骨架拓扑结构信息,根据上述拓扑结构结合切垂线测量法以及植株结构特征,获取植株表型信息。直接对植株的图像信息进行处理和分析,实现了植株的表型测
一种畸变参数测量方法、装置及系统.pdf
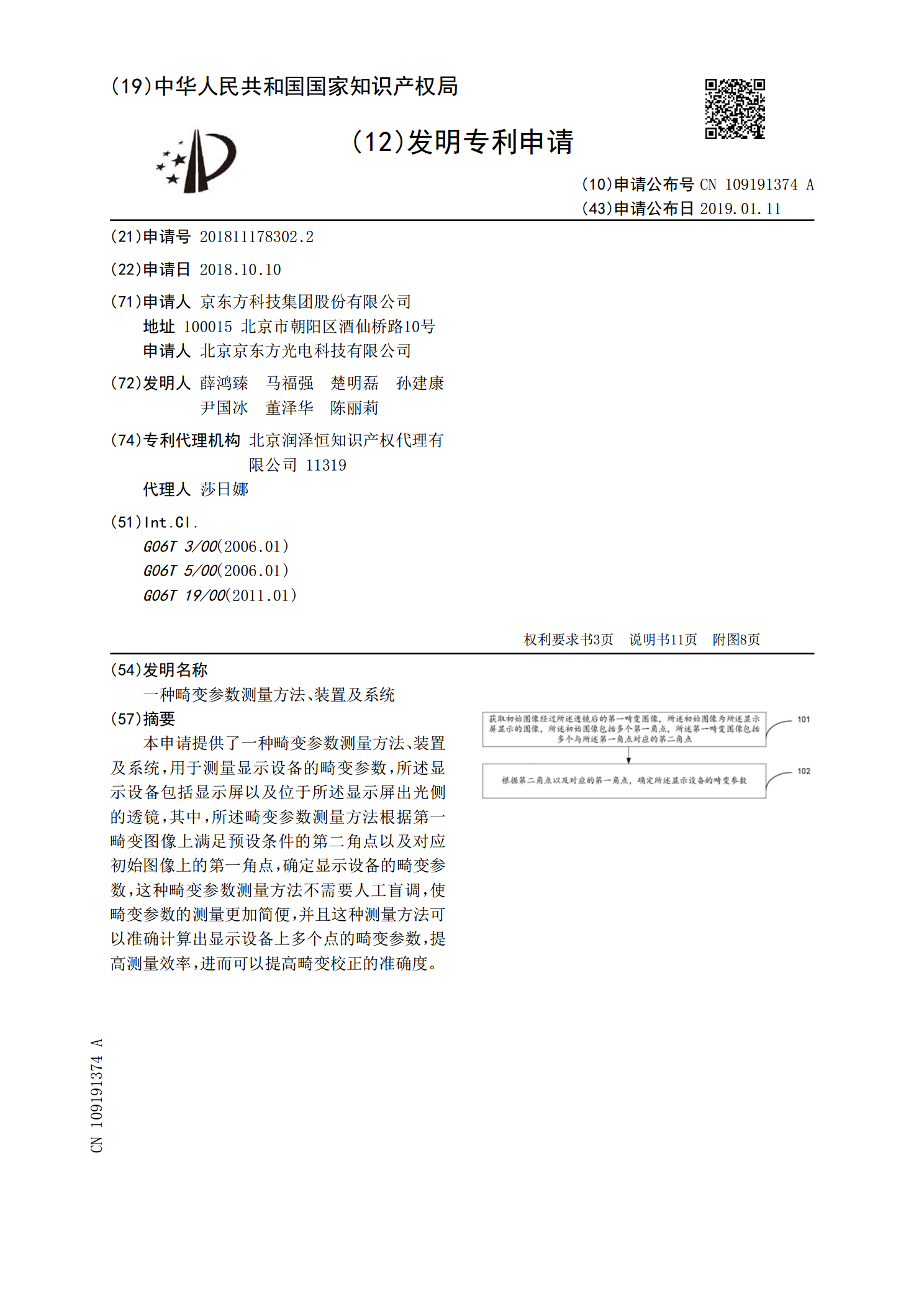
本申请提供了一种畸变参数测量方法、装置及系统,用于测量显示设备的畸变参数,所述显示设备包括显示屏以及位于所述显示屏出光侧的透镜,其中,所述畸变参数测量方法根据第一畸变图像上满足预设条件的第二角点以及对应初始图像上的第一角点,确定显示设备的畸变参数,这种畸变参数测量方法不需要人工盲调,使畸变参数的测量更加简便,并且这种测量方法可以准确计算出显示设备上多个点的畸变参数,提高测量效率,进而可以提高畸变校正的准确度。
一种激光参数测量装置的标定系统及方法.pdf
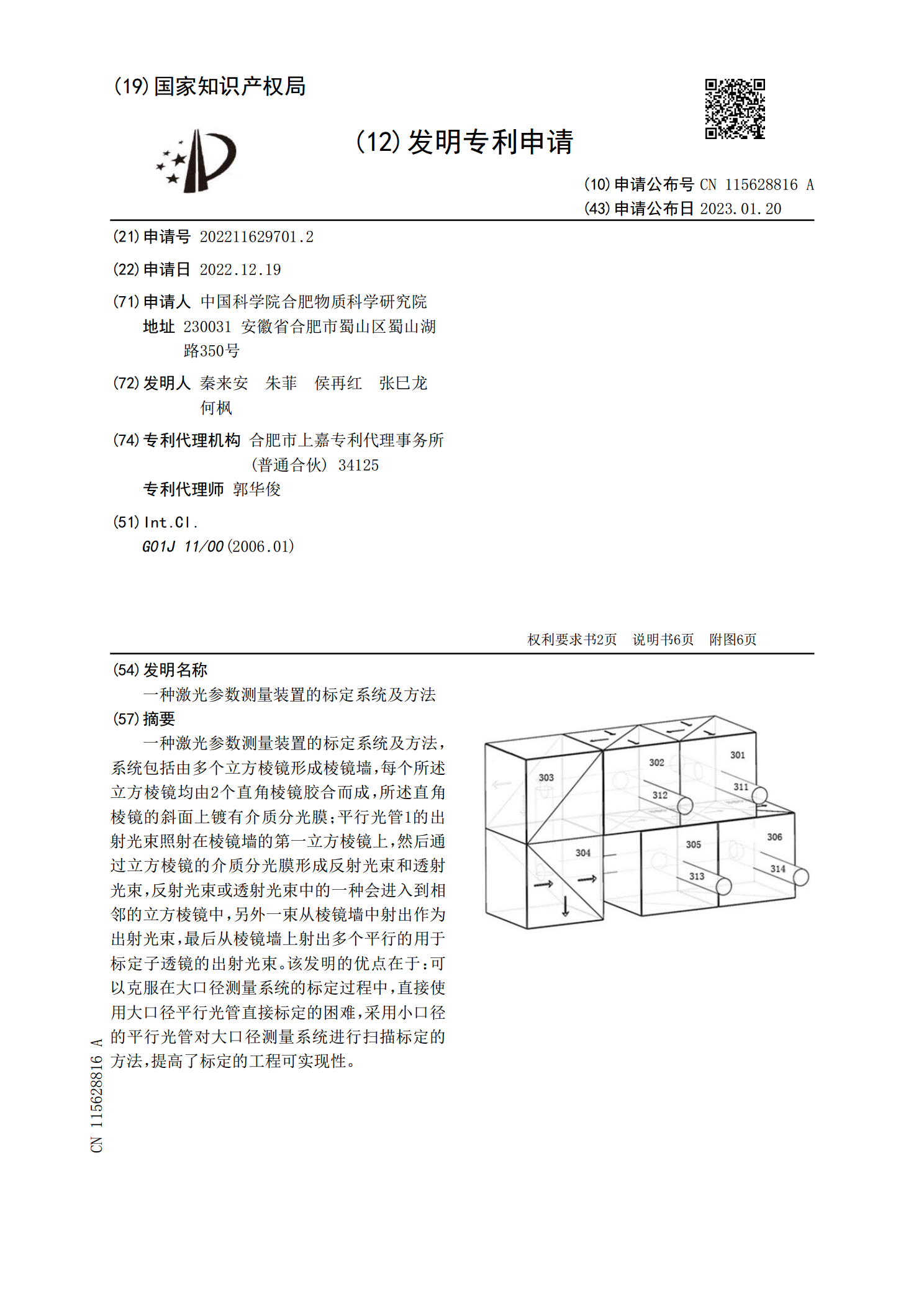
一种激光参数测量装置的标定系统及方法,系统包括由多个立方棱镜形成棱镜墙,每个所述立方棱镜均由2个直角棱镜胶合而成,所述直角棱镜的斜面上镀有介质分光膜;平行光管1的出射光束照射在棱镜墙的第一立方棱镜上,然后通过立方棱镜的介质分光膜形成反射光束和透射光束,反射光束或透射光束中的一种会进入到相邻的立方棱镜中,另外一束从棱镜墙中射出作为出射光束,最后从棱镜墙上射出多个平行的用于标定子透镜的出射光束。该发明的优点在于:可以克服在大口径测量系统的标定过程中,直接使用大口径平行光管直接标定的困难,采用小口径的平行光管对

植物表型测量系统及方法.pdf
本发明涉及一种植物表型测量系统,包括:吊轨和植物表型测量装置;吊轨形成有轨道面;植物表型测量装置吊装至吊轨并沿轨道面运动;植物表型测量装置包括:主机架、行进装置、升降装置、升降架和多个摄像头;行进装置安装至主机架;行进装置用于带动主机架沿吊轨运动;升降架用于安装摄像头;升降装置带动升降架相对于主机架运动从而调节摄像头的高度;行进装置包括:辅助轮、行进轮、行进电机和行进轴;升降装置包括:升降导杆、升降滑套、丝杆、丝杆螺母和升降电机。本发明的有益效果是:植物表型测量装置吊装至吊轨并沿轨道面运动对植物表型进行测