
一种拉登傅里叶变换盲速旁瓣抑制方法.pdf

fa****楠吖


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种拉登傅里叶变换盲速旁瓣抑制方法.pdf
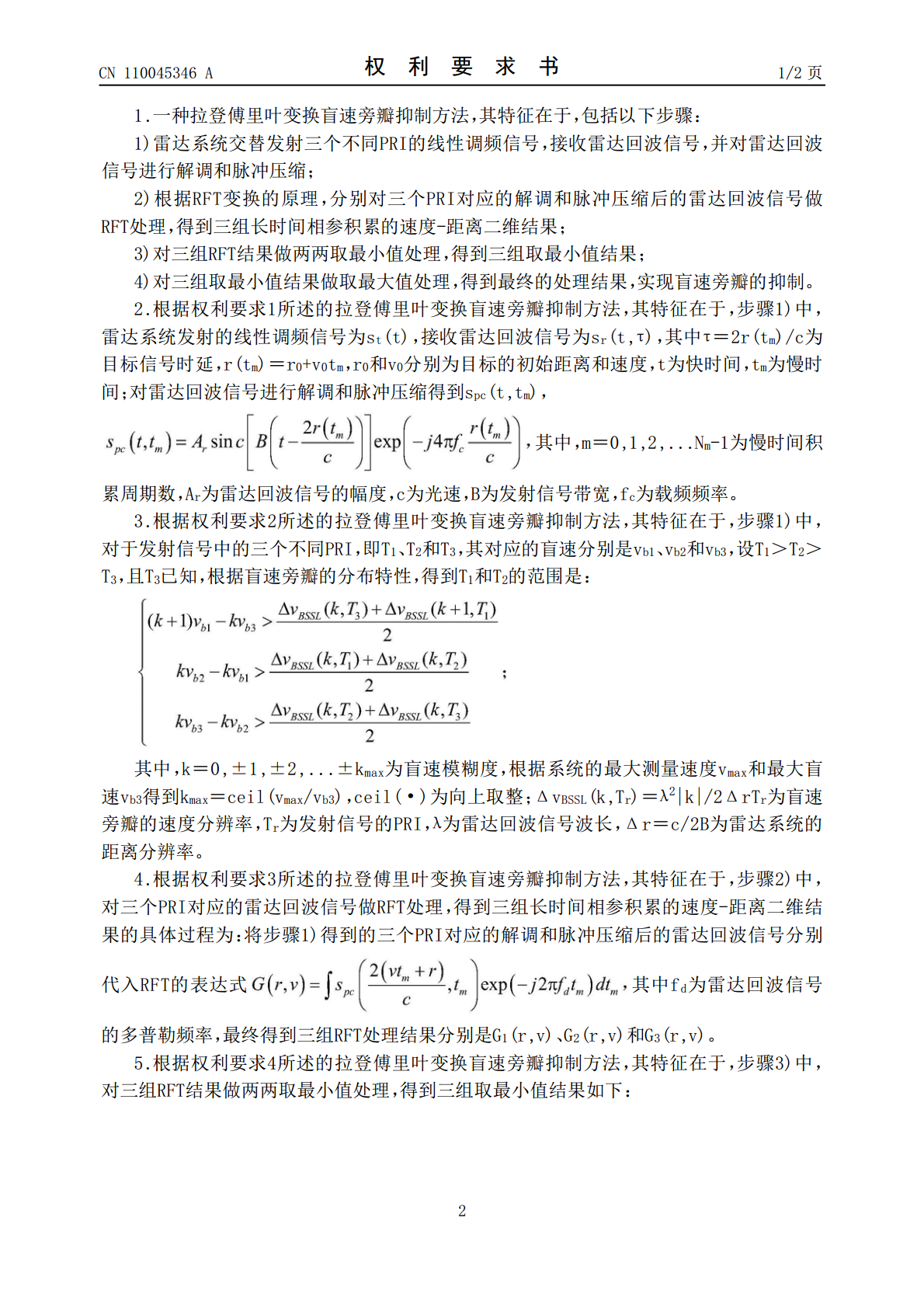
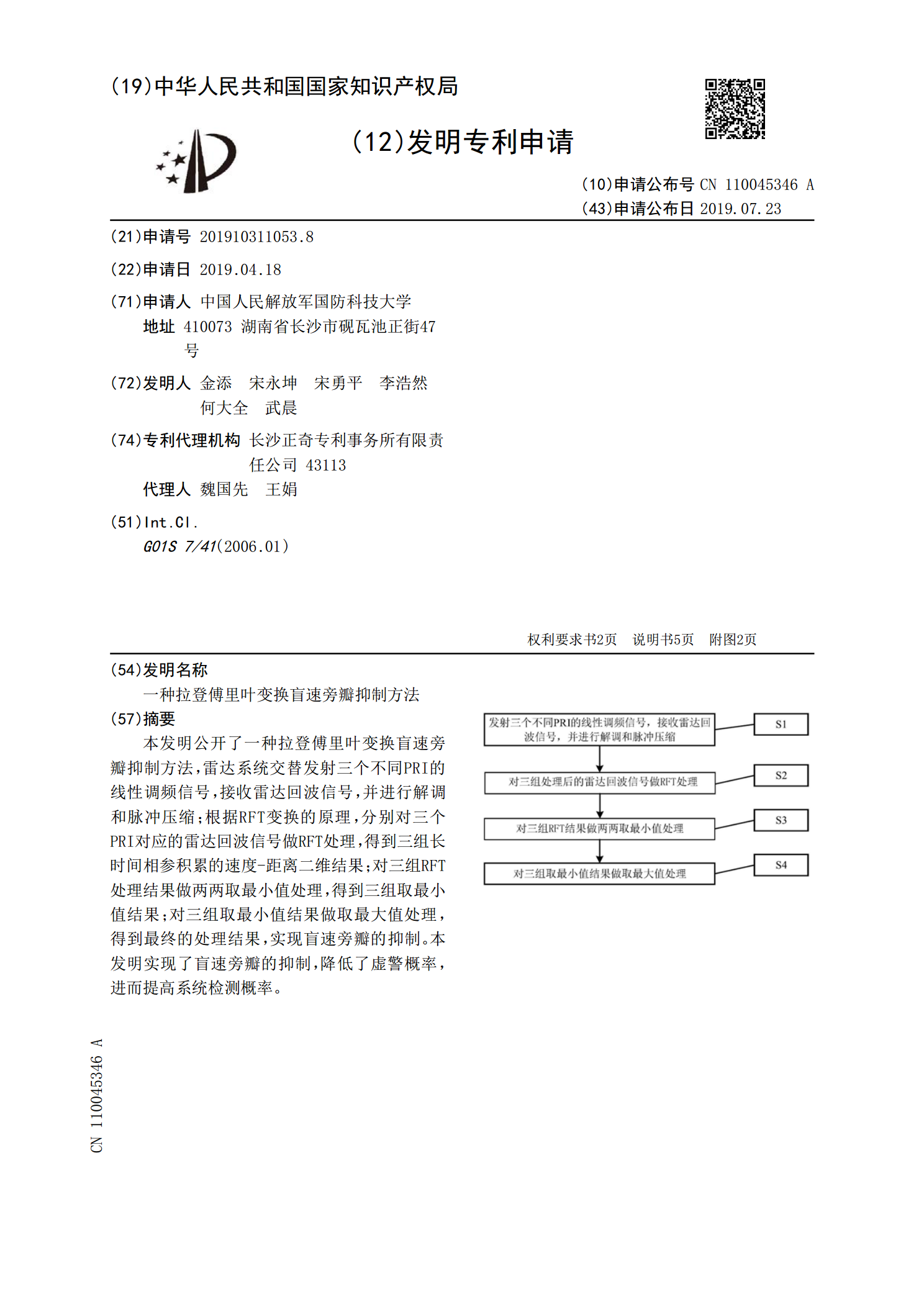
本发明公开了一种拉登傅里叶变换盲速旁瓣抑制方法,雷达系统交替发射三个不同PRI的线性调频信号,接收雷达回波信号,并进行解调和脉冲压缩;根据RFT变换的原理,分别对三个PRI对应的雷达回波信号做RFT处理,得到三组长时间相参积累的速度‑距离二维结果;对三组RFT处理结果做两两取最小值处理,得到三组取最小值结果;对三组取最小值结果做取最大值处理,得到最终的处理结果,实现盲速旁瓣的抑制。本发明实现了盲速旁瓣的抑制,降低了虚警概率,进而提高系统检测概率。

基于多载频MIMO雷达的Radon-Fourier变换盲速旁瓣抑制.docx
基于多载频MIMO雷达的Radon-Fourier变换盲速旁瓣抑制近年来,多载频MIMO雷达在雷达领域备受瞩目。它通过使用多个发射天线和接收天线,实现了高精度目标检测和成像。而Radon-Fourier变换是一种常用的快速成像技术,能够对雷达数据进行高分辨率成像。然而,在实际应用中,多载频MIMO雷达存在着严重的速度旁瓣问题,这限制了雷达的应用范围。提出Radon-Fourier变换盲速旁瓣抑制方法,旨在解决多载频MIMO雷达在高速目标检测中出现的速度旁瓣问题。该方法将Radon-Fourier变换和盲速

基于雷达脉冲重复间隔设计的Radon-Fourier变换盲速旁瓣抑制.docx
基于雷达脉冲重复间隔设计的Radon-Fourier变换盲速旁瓣抑制一、引言雷达是一种广泛应用于各种领域的无线电测距与探测设备,具有高精度、远距离探测和易于控制等优点。在雷达信号处理中,旋转目标散射干扰等将导致盲速旁瓣效应,这将严重影响雷达探测的精度和效率。因此,如何抑制盲速旁瓣效应已成为雷达技术研究的热点。盲速旁瓣效应是由于雷达发射的信号存在重复间隔而导致的一种漏报现象。为了解决这个问题,研究者提出了多种不同的方法,如空间滤波、幅值补偿、变频等。Radon-Fourier变换方法是一种基于雷达脉冲重复间
OFDM通信信号的旁瓣抑制方法.pdf
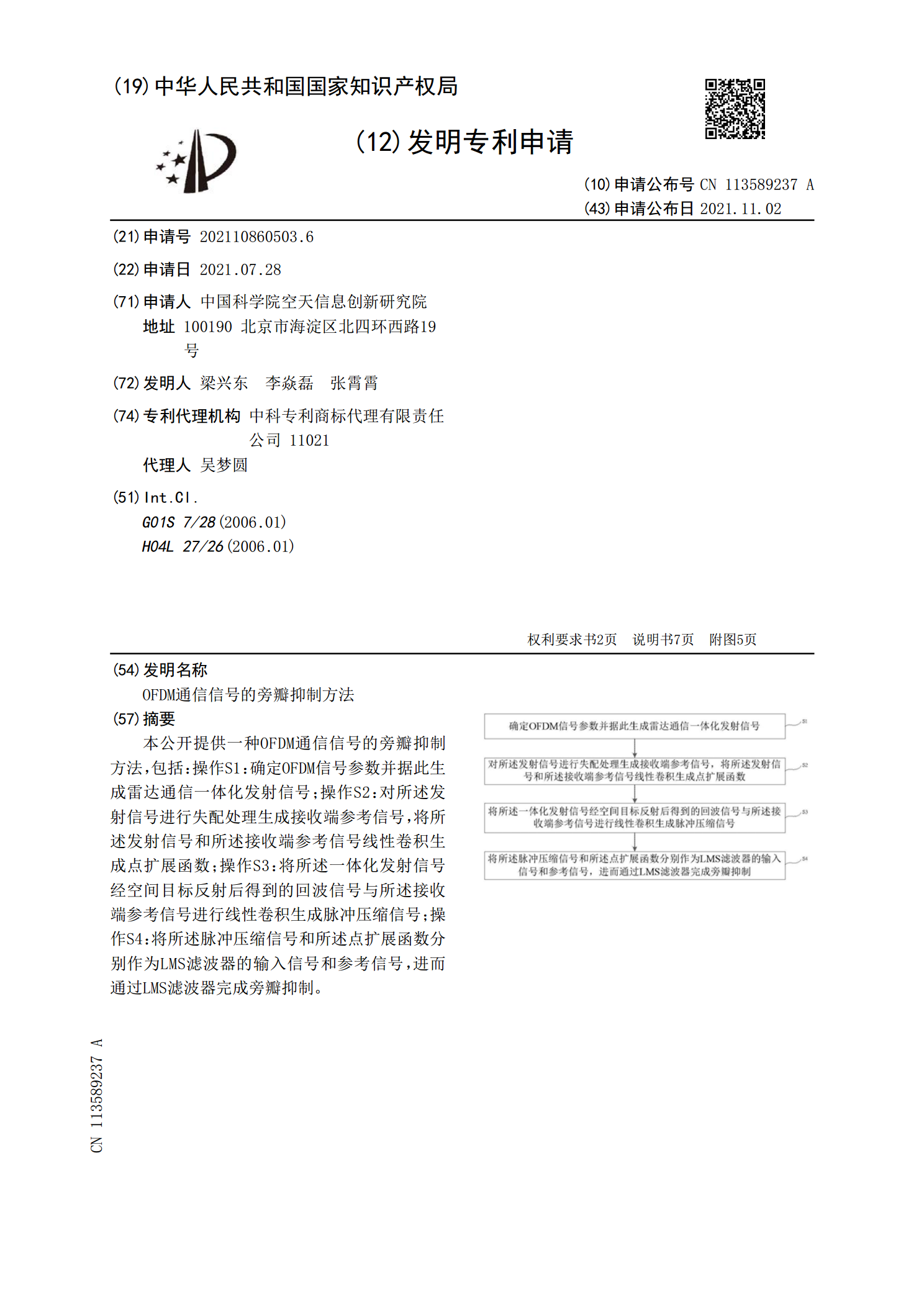
本公开提供一种OFDM通信信号的旁瓣抑制方法,包括:操作S1:确定OFDM信号参数并据此生成雷达通信一体化发射信号;操作S2:对所述发射信号进行失配处理生成接收端参考信号,将所述发射信号和所述接收端参考信号线性卷积生成点扩展函数;操作S3:将所述一体化发射信号经空间目标反射后得到的回波信号与所述接收端参考信号进行线性卷积生成脉冲压缩信号;操作S4:将所述脉冲压缩信号和所述点扩展函数分别作为LMS滤波器的输入信号和参考信号,进而通过LMS滤波器完成旁瓣抑制。

一种随机稀布MIMO雷达的旁瓣抑制方法.docx
一种随机稀布MIMO雷达的旁瓣抑制方法随机稀布MIMO雷达的旁瓣抑制方法摘要:多输入多输出(MIMO)雷达系统是一种基于波束形成和信号处理的雷达系统,具有高分辨率和抗干扰能力。然而,由于天线阵列的旁瓣造成的旁瓣干扰会降低MIMO雷达系统的性能。为了解决这一问题,本文提出了一种随机稀布MIMO雷达的旁瓣抑制方法。通过随机选择天线元,将相位差和振幅权重施加给这些天线元,然后利用旁瓣对消技术来抑制旁瓣干扰。仿真结果表明,该方法能够有效地抑制旁瓣干扰,提高雷达系统的性能。关键词:MIMO雷达、旁瓣抑制、相位差、振