
一种采用简化Halbach永磁体阵列的三自由度球形电机.pdf

依波****bc

1/9
2/9

3/9

4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种采用简化Halbach永磁体阵列的三自由度球形电机.pdf
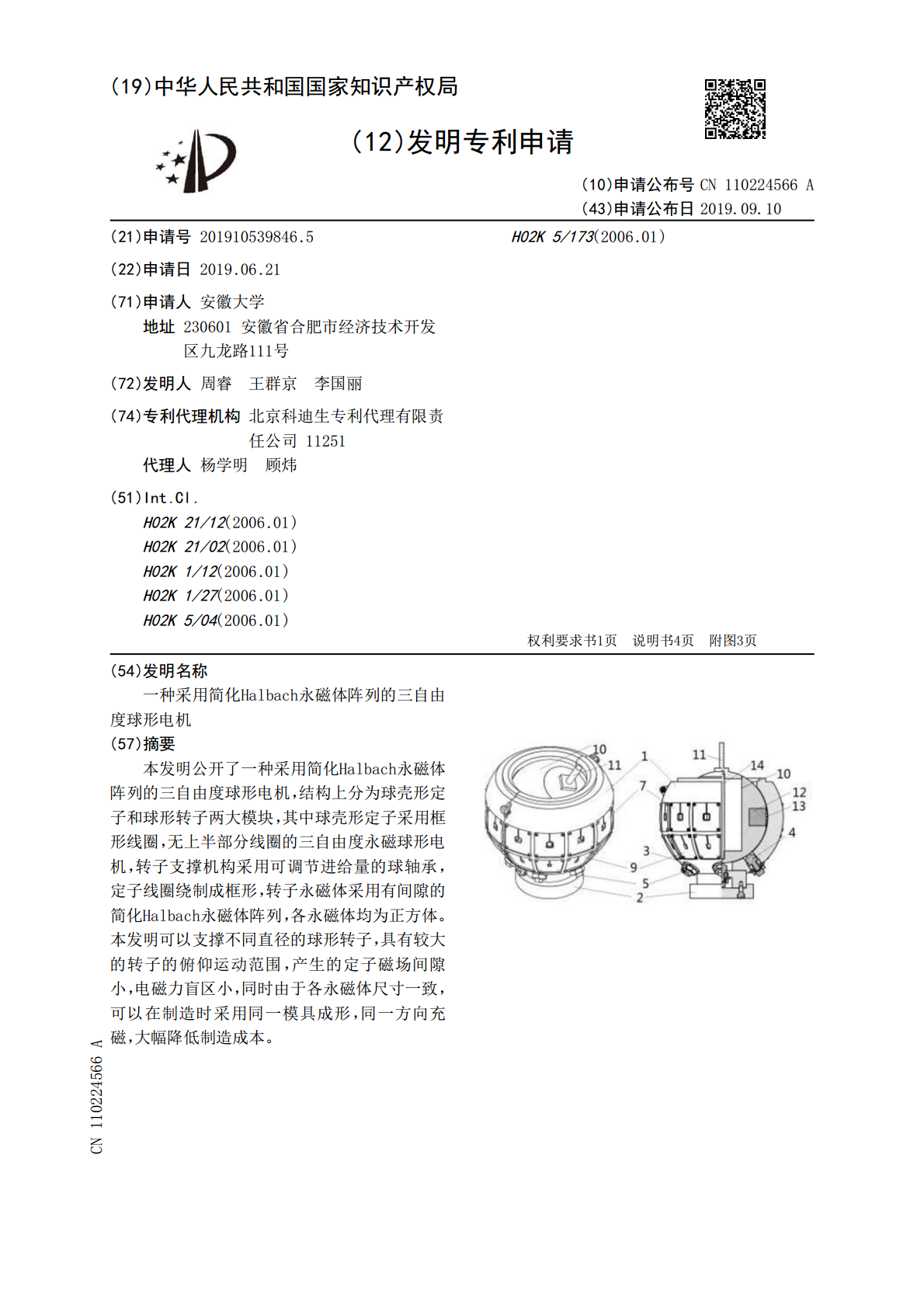
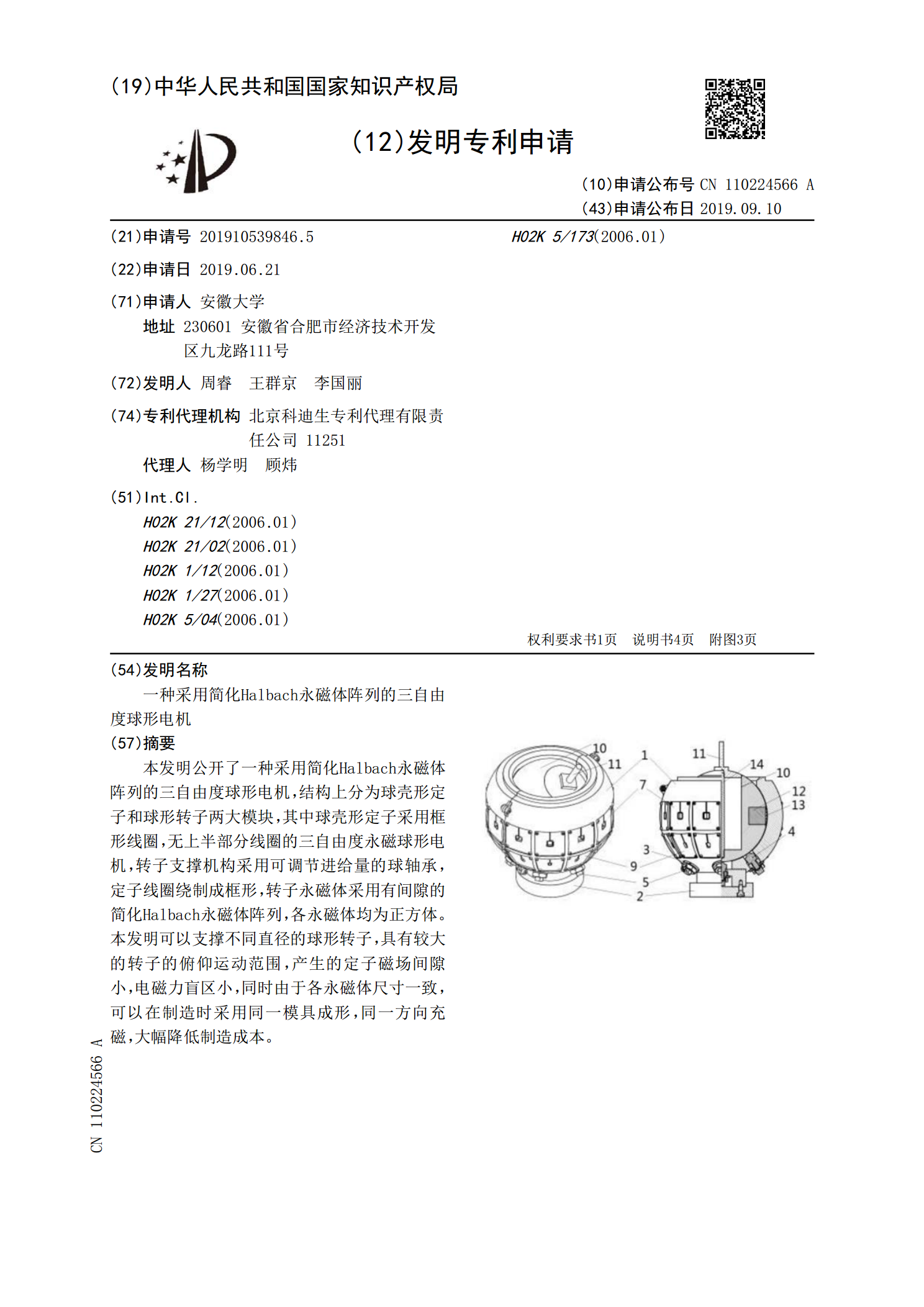
本发明公开了一种采用简化Halbach永磁体阵列的三自由度球形电机,结构上分为球壳形定子和球形转子两大模块,其中球壳形定子采用框形线圈,无上半部分线圈的三自由度永磁球形电机,转子支撑机构采用可调节进给量的球轴承,定子线圈绕制成框形,转子永磁体采用有间隙的简化Halbach永磁体阵列,各永磁体均为正方体。本发明可以支撑不同直径的球形转子,具有较大的转子的俯仰运动范围,产生的定子磁场间隙小,电磁力盲区小,同时由于各永磁体尺寸一致,可以在制造时采用同一模具成形,同一方向充磁,大幅降低制造成本。
一种Halbach永磁体阵列.pdf
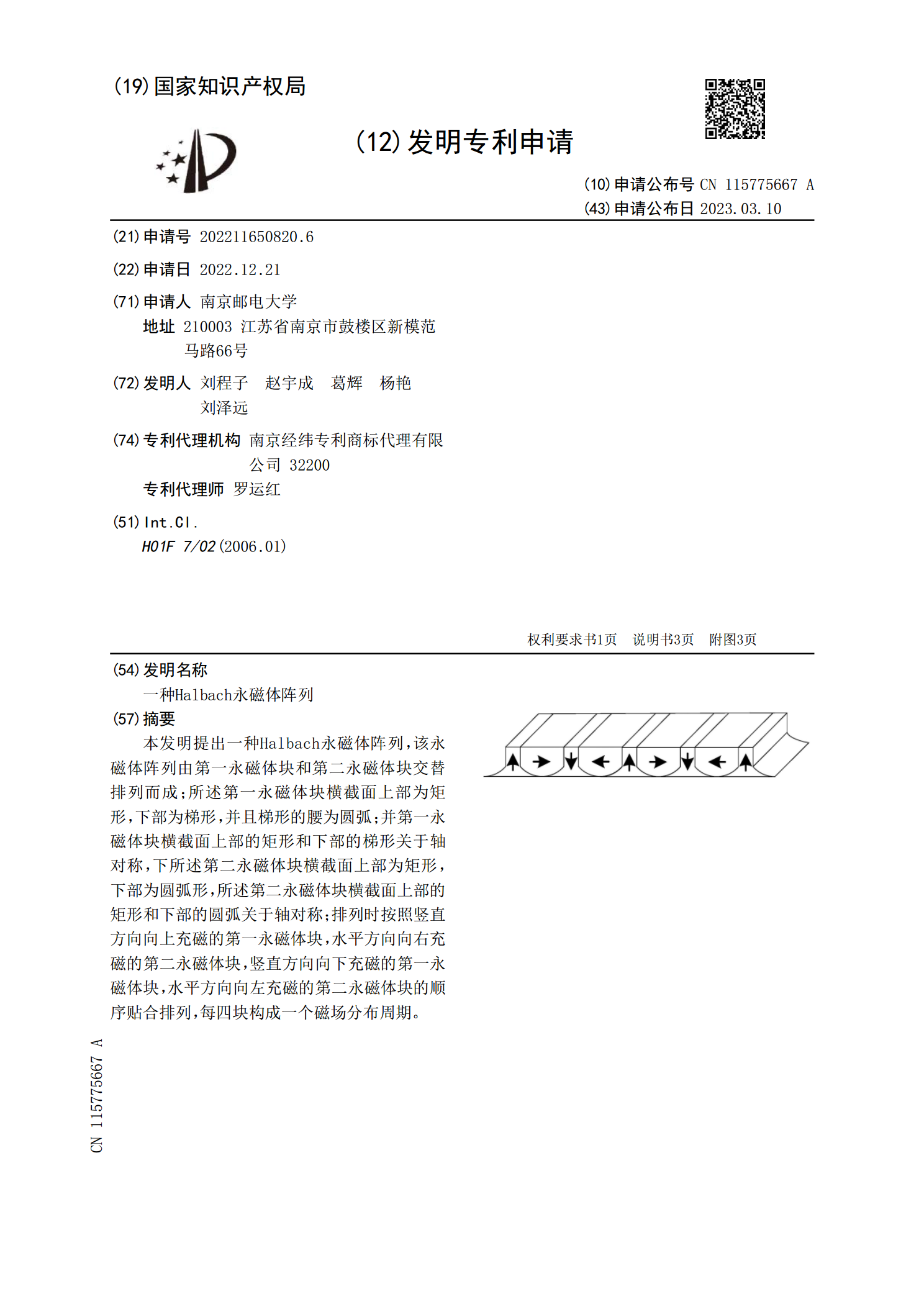
本发明提出一种Halbach永磁体阵列,该永磁体阵列由第一永磁体块和第二永磁体块交替排列而成;所述第一永磁体块横截面上部为矩形,下部为梯形,并且梯形的腰为圆弧;并第一永磁体块横截面上部的矩形和下部的梯形关于轴对称,下所述第二永磁体块横截面上部为矩形,下部为圆弧形,所述第二永磁体块横截面上部的矩形和下部的圆弧关于轴对称;排列时按照竖直方向向上充磁的第一永磁体块,水平方向向右充磁的第二永磁体块,竖直方向向下充磁的第一永磁体块,水平方向向左充磁的第二永磁体块的顺序贴合排列,每四块构成一个磁场分布周期。
轴向磁通电机中Halbach阵列永磁体的解析优化方法.pptx
汇报人:/目录01永磁体的工作原理Halbach阵列的结构特点轴向磁通电机的结构与工作原理02解析优化方法的定义与目标解析优化方法的常用方法解析优化方法的实施步骤03磁场分布的解析优化永磁体结构的解析优化电机性能的解析优化04解析优化方法的优势解析优化方法的局限性未来研究方向与展望05应用实例一:高效能轴向磁通电机设计应用实例二:节能型电机系统的设计应用实例三:大功率电机系统的设计06轴向磁通电机中Halbach阵列永磁体的解析优化方法的意义与价值对未来研究的建议与展望汇报人:

Halbach阵列永磁体的研究现状与应用.docx
Halbach阵列永磁体的研究现状与应用引言永磁体是一种具有恒定磁性的材料,在工业生产过程中具有广泛的应用。Halbach阵列永磁体是一种特殊的永磁体,在其磁场的设计和控制方面具有突出的优势,因此在各个领域得到广泛应用。本文将简要介绍Halbach阵列永磁体的研究现状和应用。一、Halbach阵列永磁体的概述Halbach阵列永磁体是由德国物理学家KarlHalbach于1980年提出的一种特殊的磁体结构。其原理是通过特定的排列方式,使得磁体在一侧的磁场强度增加,而在另一侧的磁场强度减小。Halbach阵

Halbach阵列永磁球形电动机三维磁场分析.docx
Halbach阵列永磁球形电动机三维磁场分析标题:Halbach阵列永磁球形电动机三维磁场分析摘要:Halbach阵列永磁球形电动机具有独特的磁场分布特性,可以提高电动机的功率密度和效率。本论文对Halbach阵列永磁球形电动机的三维磁场分布进行了分析和探讨。首先,介绍了Halbach阵列永磁球形电动机的结构和工作原理。然后,通过有限元仿真方法对该电动机的磁场分布进行了模拟,并分析了不同参数对磁场分布的影响。最后,对Halbach阵列永磁球形电动机的优缺点进行了总结,并展望了未来的研究方向。关键词:Hal