
车辆转弯盲区预警方法及系统.pdf

St****36


1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆转弯盲区预警方法及系统.pdf
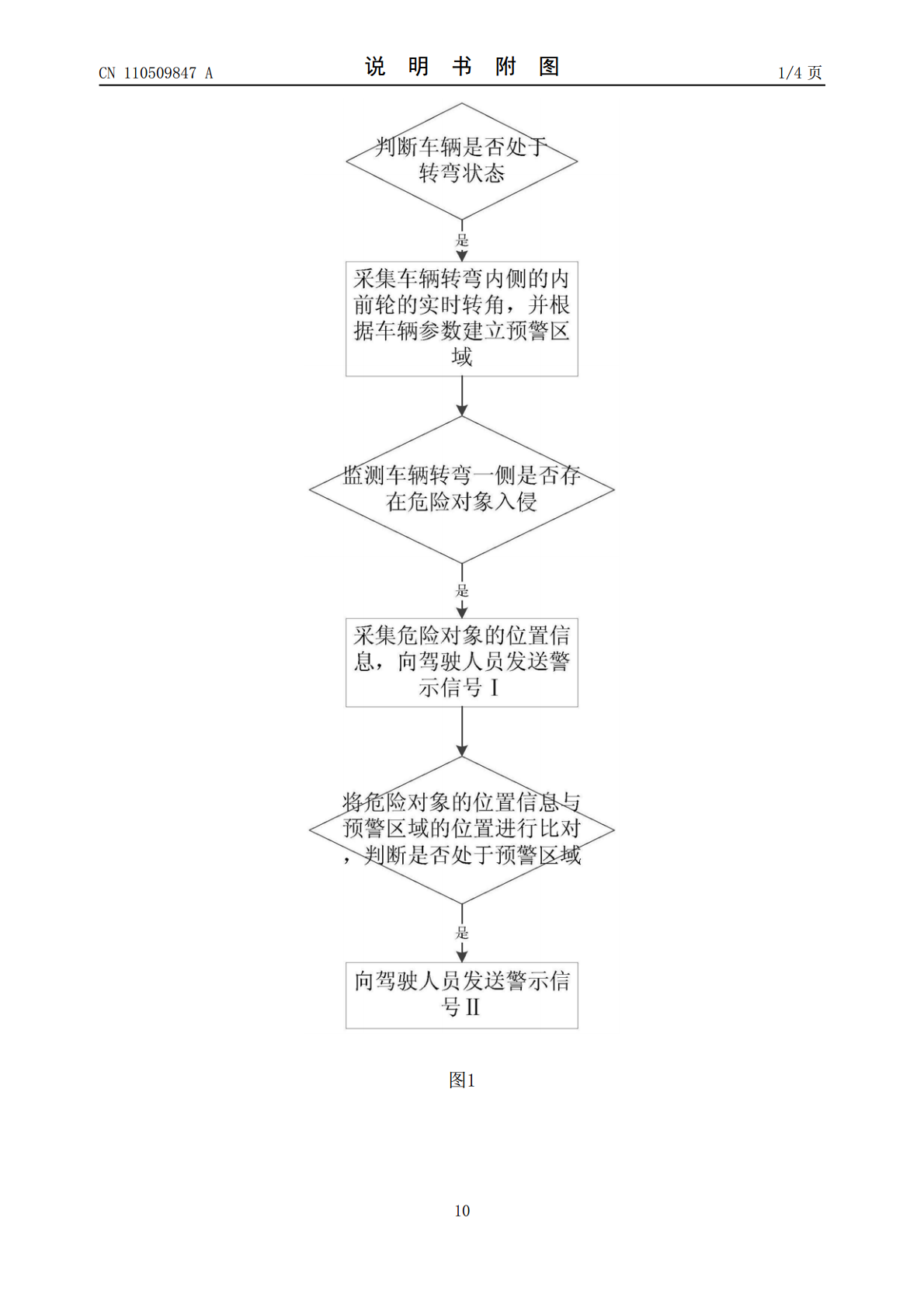
本发明提供一种车辆转弯盲区预警方法,包括:判断车辆是否处于转弯状态;如是,采集车辆转弯内侧的内前轮的实时转角,并根据车辆参数建立预警区域;监测车辆转弯一侧是否存在危险对象入侵;如存在危险对象入侵,采集危险对象的位置信息,向驾驶人员发送警示信号Ⅰ;将危险对象的位置信息与预警区域的位置进行比对,判断是否处于预警区域;如是,向驾驶人员发送警示信号Ⅱ;通过本发明增加缓冲预警区域,将内轮差的基本预警区域扩大,建立两级预警区域,实时监测预警区域中危险对象入侵情况和位置信息,在为驾驶人员提供语音预警提示的同时,为驾驶人

一种车辆转弯盲区的安全预警系统及方法.pdf
本发明实施例提供了一种车辆转弯盲区的安全预警系统及方法,该系统包括:第一监控装置、第二监控装置和第一预警装置;第一监控装置所包括的第一监控单元用于检测第一区域内是否存在预设类型的车辆;第二监控装置用于在第一区域内存在预设类型的车辆时,检测第二区域内是否存在预设对象;并在确定转弯盲区内存在预设对象的情况下,控制第一预警装置输出用于提示预设对象离开转弯盲区的第一预警信息;第二监控装置还用于在确定转弯盲区内不存在预设对象时,控制第一预警装置输出用于提示预设对象禁止进入转弯盲区的第二预警信息。与现有技术相比,应用
车辆盲区防撞预警系统及方法.pdf
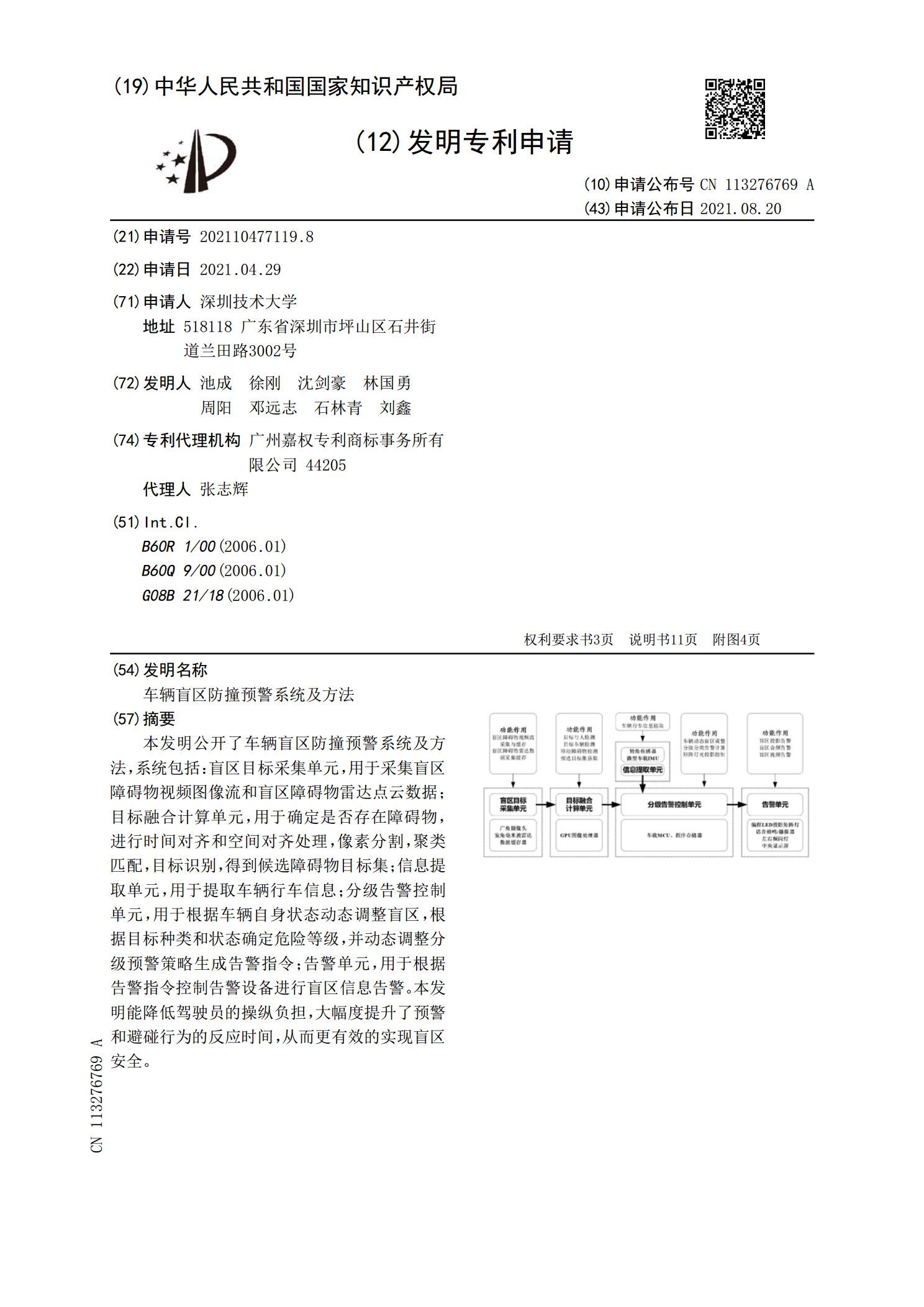
本发明公开了车辆盲区防撞预警系统及方法,系统包括:盲区目标采集单元,用于采集盲区障碍物视频图像流和盲区障碍物雷达点云数据;目标融合计算单元,用于确定是否存在障碍物,进行时间对齐和空间对齐处理,像素分割,聚类匹配,目标识别,得到候选障碍物目标集;信息提取单元,用于提取车辆行车信息;分级告警控制单元,用于根据车辆自身状态动态调整盲区,根据目标种类和状态确定危险等级,并动态调整分级预警策略生成告警指令;告警单元,用于根据告警指令控制告警设备进行盲区信息告警。本发明能降低驾驶员的操纵负担,大幅度提升了预警和避碰行
车辆转弯盲区提醒系统.pdf
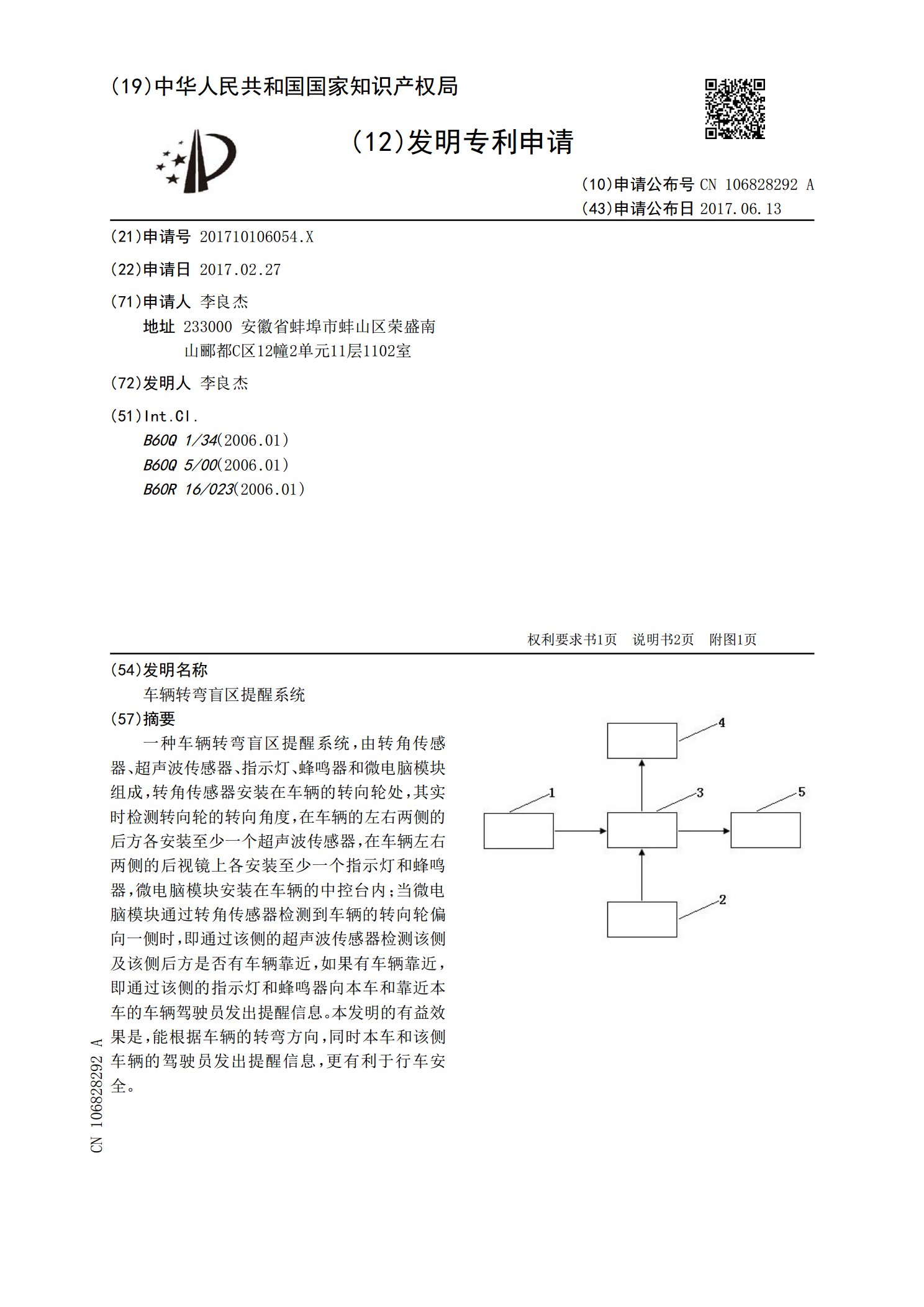
一种车辆转弯盲区提醒系统,由转角传感器、超声波传感器、指示灯、蜂鸣器和微电脑模块组成,转角传感器安装在车辆的转向轮处,其实时检测转向轮的转向角度,在车辆的左右两侧的后方各安装至少一个超声波传感器,在车辆左右两侧的后视镜上各安装至少一个指示灯和蜂鸣器,微电脑模块安装在车辆的中控台内;当微电脑模块通过转角传感器检测到车辆的转向轮偏向一侧时,即通过该侧的超声波传感器检测该侧及该侧后方是否有车辆靠近,如果有车辆靠近,即通过该侧的指示灯和蜂鸣器向本车和靠近本车的车辆驾驶员发出提醒信息。本发明的有益效果是,能根据车辆
车辆转弯盲区显示系统.pdf
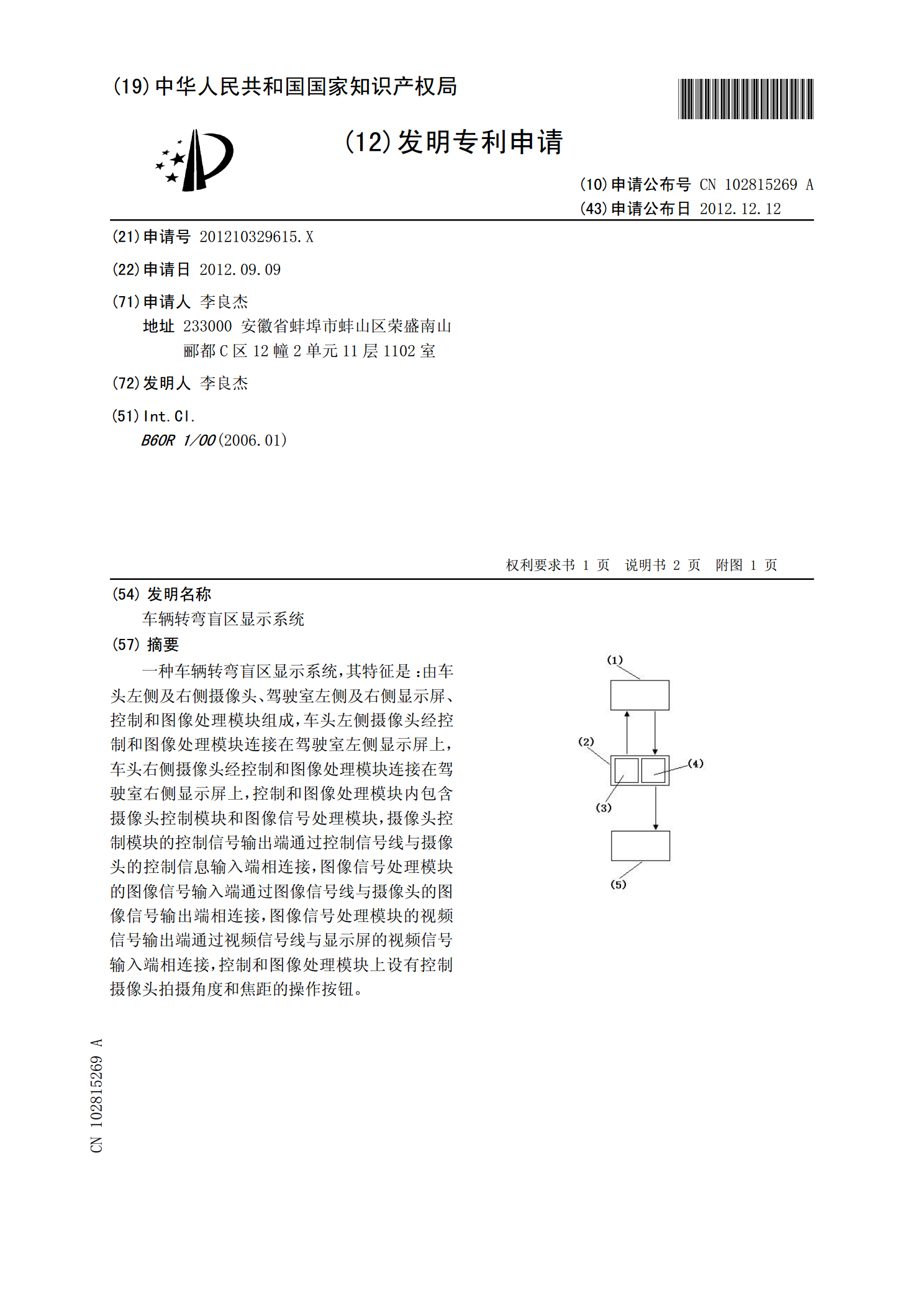
一种车辆转弯盲区显示系统,其特征是:由车头左侧及右侧摄像头、驾驶室左侧及右侧显示屏、控制和图像处理模块组成,车头左侧摄像头经控制和图像处理模块连接在驾驶室左侧显示屏上,车头右侧摄像头经控制和图像处理模块连接在驾驶室右侧显示屏上,控制和图像处理模块内包含摄像头控制模块和图像信号处理模块,摄像头控制模块的控制信号输出端通过控制信号线与摄像头的控制信息输入端相连接,图像信号处理模块的图像信号输入端通过图像信号线与摄像头的图像信号输出端相连接,图像信号处理模块的视频信号输出端通过视频信号线与显示屏的视频信号输入端