
基于Michelson-Sagnac光纤干涉仪的分布式传感系统.pdf

Do****76

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于Michelson-Sagnac光纤干涉仪的分布式传感系统.pdf
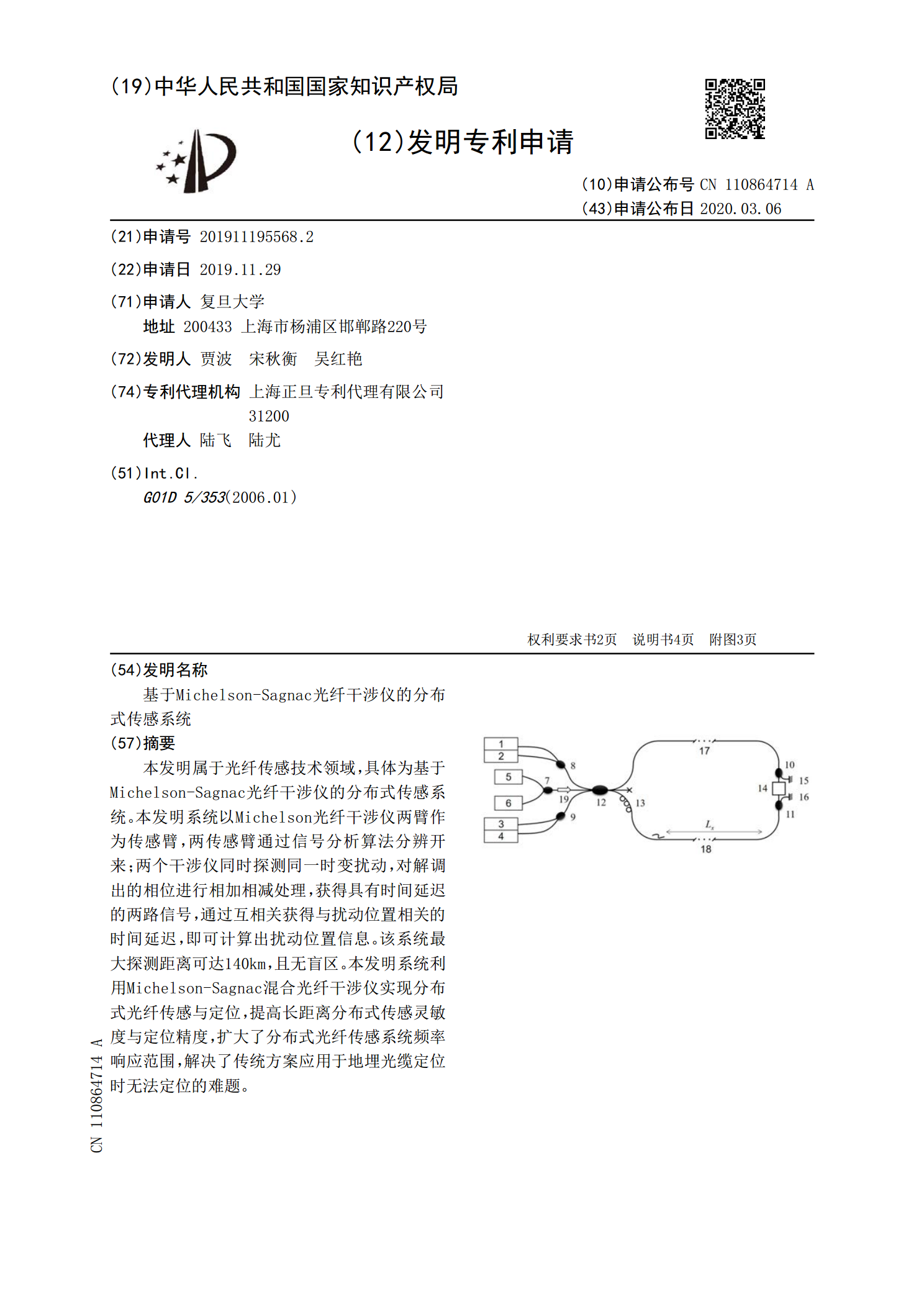
本发明属于光纤传感技术领域,具体为基于Michelson‑Sagnac光纤干涉仪的分布式传感系统。本发明系统以Michelson光纤干涉仪两臂作为传感臂,两传感臂通过信号分析算法分辨开来;两个干涉仪同时探测同一时变扰动,对解调出的相位进行相加相减处理,获得具有时间延迟的两路信号,通过互相关获得与扰动位置相关的时间延迟,即可计算出扰动位置信息。该系统最大探测距离可达140km,且无盲区。本发明系统利用Michelson‑Sagnac混合光纤干涉仪实现分布式光纤传感与定位,提高长距离分布式传感灵敏度与定位精度
一种基于双向迈克尔逊干涉仪的分布式光纤传感定位系统.pdf
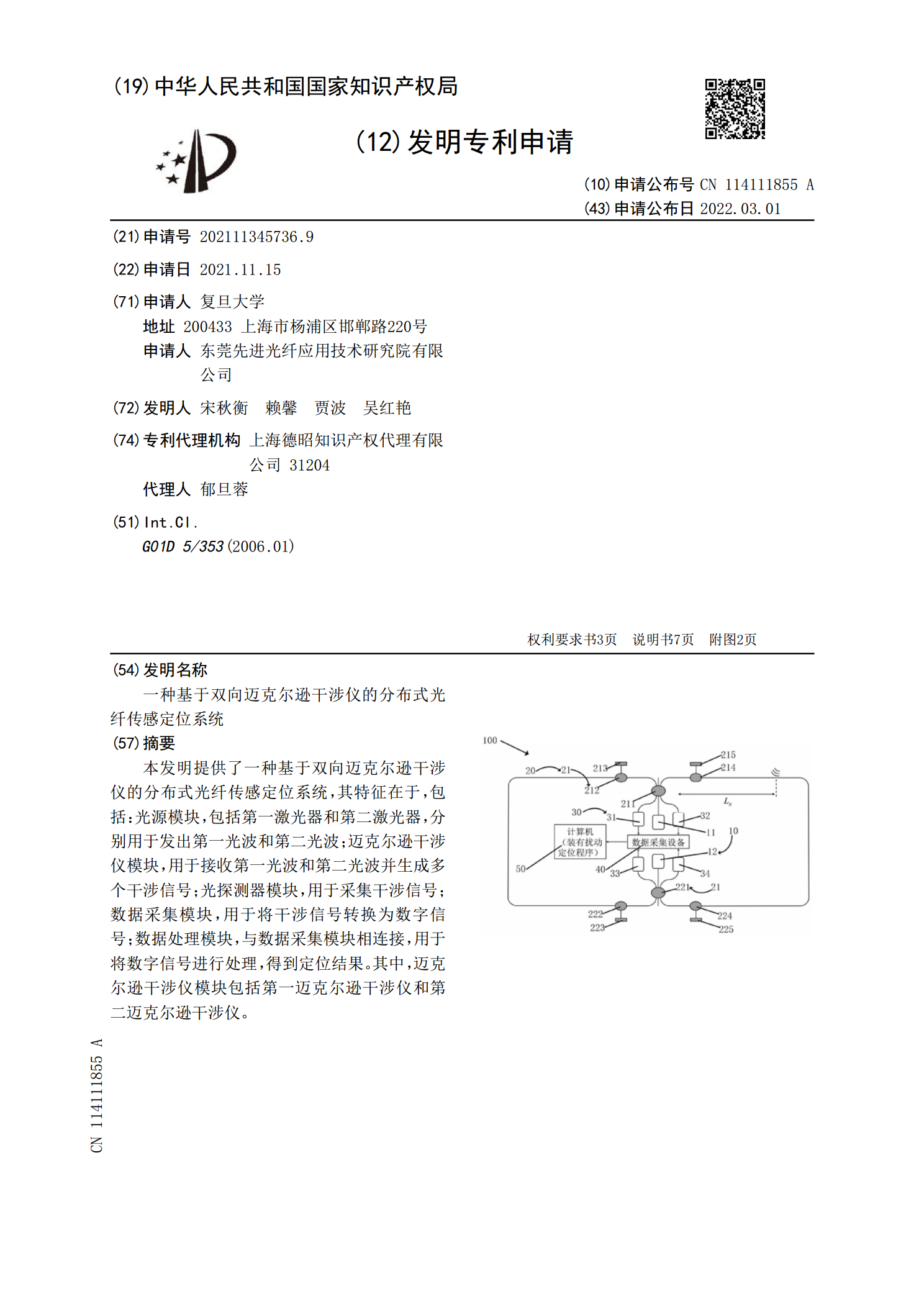
本发明提供了一种基于双向迈克尔逊干涉仪的分布式光纤传感定位系统,其特征在于,包括:光源模块,包括第一激光器和第二激光器,分别用于发出第一光波和第二光波;迈克尔逊干涉仪模块,用于接收第一光波和第二光波并生成多个干涉信号;光探测器模块,用于采集干涉信号;数据采集模块,用于将干涉信号转换为数字信号;数据处理模块,与数据采集模块相连接,用于将数字信号进行处理,得到定位结果。其中,迈克尔逊干涉仪模块包括第一迈克尔逊干涉仪和第二迈克尔逊干涉仪。
一种基于双迈克尔逊干涉仪的光纤分布式扰动传感系统.pdf
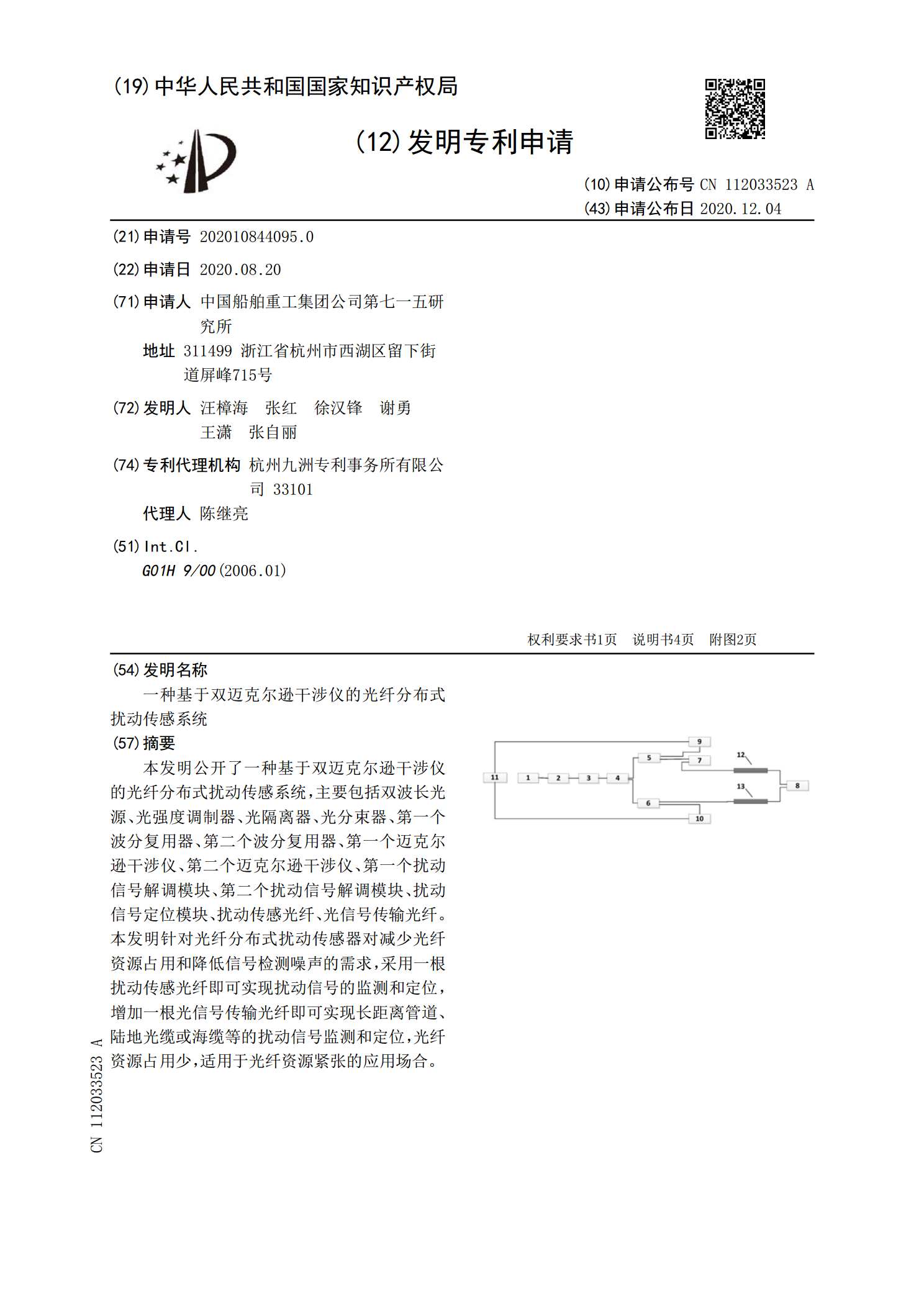
本发明公开了一种基于双迈克尔逊干涉仪的光纤分布式扰动传感系统,主要包括双波长光源、光强度调制器、光隔离器、光分束器、第一个波分复用器、第二个波分复用器、第一个迈克尔逊干涉仪、第二个迈克尔逊干涉仪、第一个扰动信号解调模块、第二个扰动信号解调模块、扰动信号定位模块、扰动传感光纤、光信号传输光纤。本发明针对光纤分布式扰动传感器对减少光纤资源占用和降低信号检测噪声的需求,采用一根扰动传感光纤即可实现扰动信号的监测和定位,增加一根光信号传输光纤即可实现长距离管道、陆地光缆或海缆等的扰动信号监测和定位,光纤资源占用少
低频分布式光纤传感系统.pdf
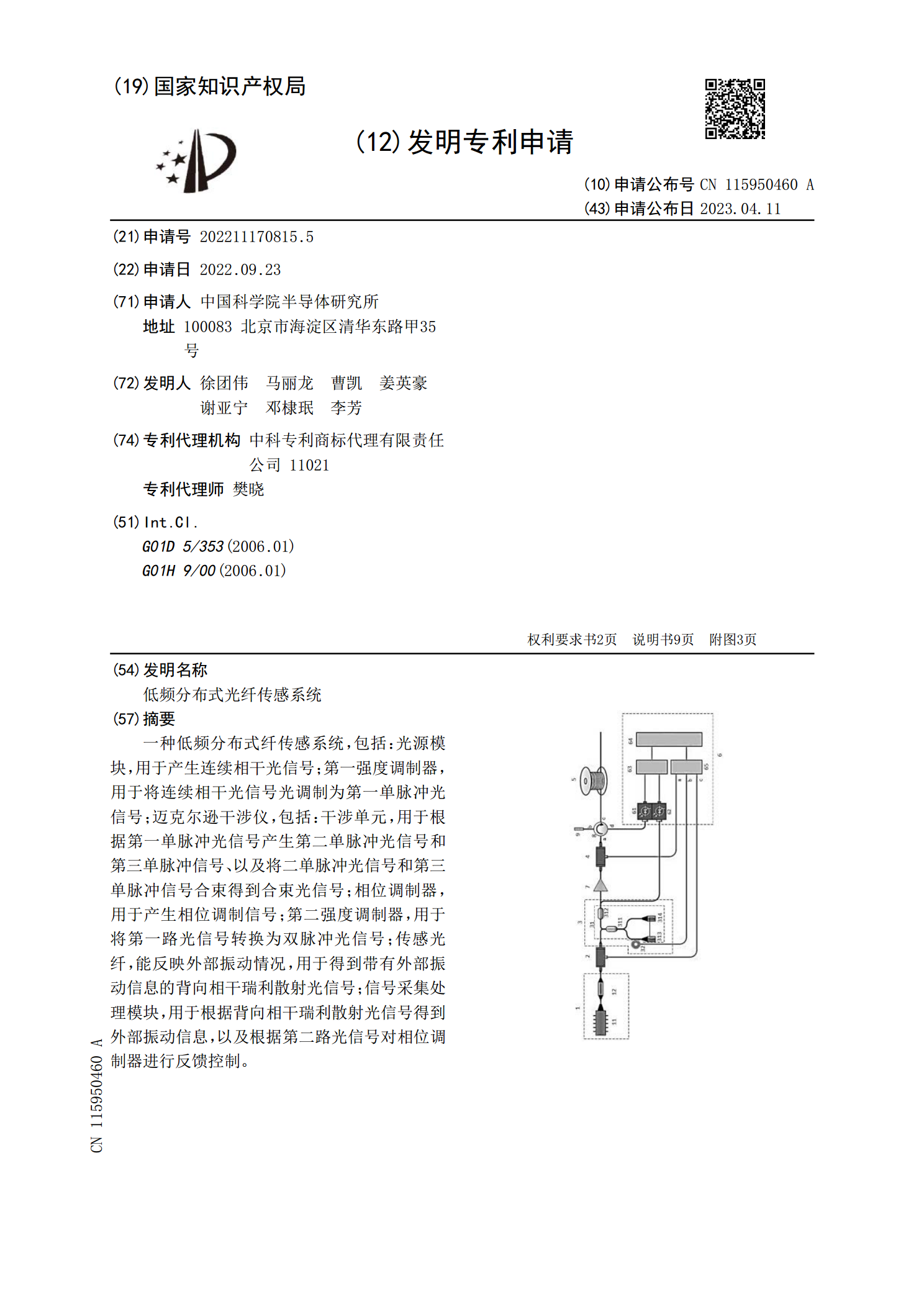
一种低频分布式纤传感系统,包括:光源模块,用于产生连续相干光信号;第一强度调制器,用于将连续相干光信号光调制为第一单脉冲光信号;迈克尔逊干涉仪,包括:干涉单元,用于根据第一单脉冲光信号产生第二单脉冲光信号和第三单脉冲信号、以及将二单脉冲光信号和第三单脉冲信号合束得到合束光信号;相位调制器,用于产生相位调制信号;第二强度调制器,用于将第一路光信号转换为双脉冲光信号;传感光纤,能反映外部振动情况,用于得到带有外部振动信息的背向相干瑞利散射光信号;信号采集处理模块,用于根据背向相干瑞利散射光信号得到外部振动信息

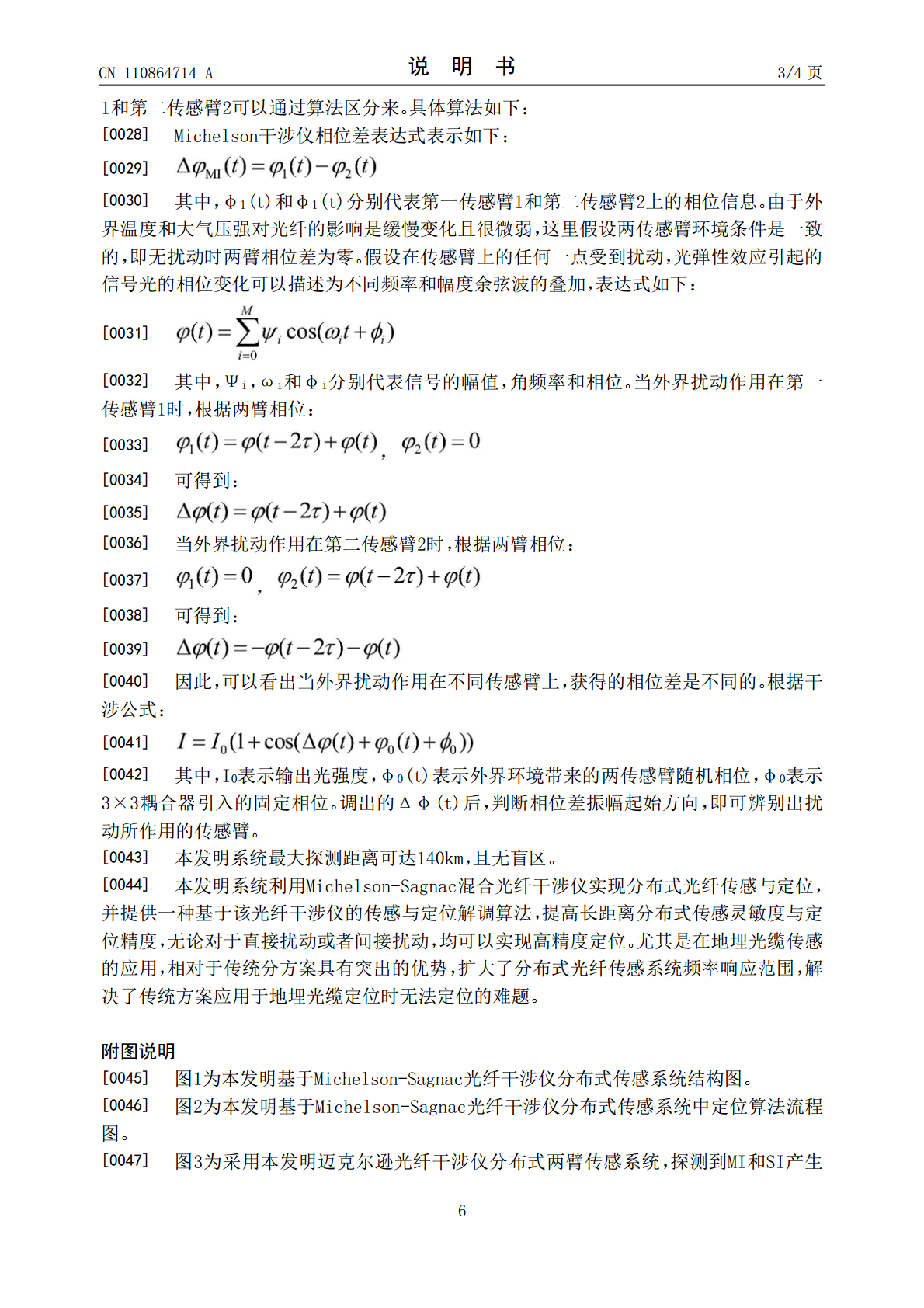
基于光纤Sagnac干涉仪的光纤传感器的任务书.docx
基于光纤Sagnac干涉仪的光纤传感器的任务书任务书:基于光纤Sagnac干涉仪的光纤传感器背景:随着技术的不断发展,光纤传感技术已经逐渐成为一种关键技术,被广泛应用在物理、化学、电子学等领域。在光纤传感技术中,基于光纤Sagnac干涉仪的光纤传感器由于其高精度、高灵敏度、抗干扰性强等优势,成为目前应用较为广泛的传感器之一。任务:设计并制作一种基于光纤Sagnac干涉仪的光纤传感器,实现对物理量的高精度测量。具体任务如下:1.对光纤传感器相关理论进行深入研究,分析其测量原理和优劣。2.设计光纤传感器的光路