
一种基于盲源分离的主瓣干扰对消与目标角度估计方法.pdf

新槐****公主


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于盲源分离的主瓣干扰对消与目标角度估计方法.pdf
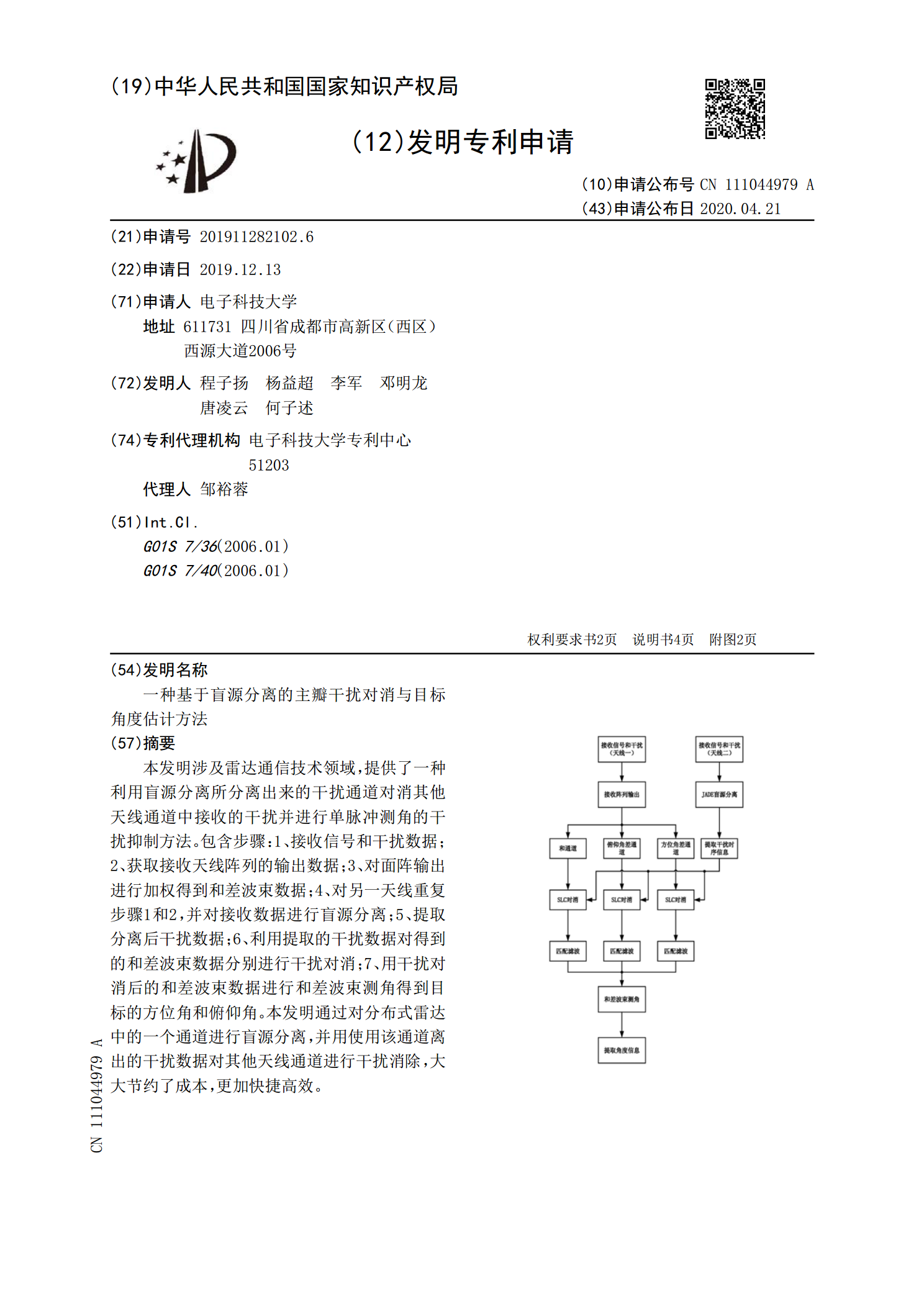
本发明涉及雷达通信技术领域,提供了一种利用盲源分离所分离出来的干扰通道对消其他天线通道中接收的干扰并进行单脉冲测角的干扰抑制方法。包含步骤:1、接收信号和干扰数据;2、获取接收天线阵列的输出数据;3、对面阵输出进行加权得到和差波束数据;4、对另一天线重复步骤1和2,并对接收数据进行盲源分离;5、提取分离后干扰数据;6、利用提取的干扰数据对得到的和差波束数据分别进行干扰对消;7、用干扰对消后的和差波束数据进行和差波束测角得到目标的方位角和俯仰角。本发明通过对分布式雷达中的一个通道进行盲源分离,并用使用该通道

一种基于盲源分离的雷达抗主瓣干扰方法.pdf
本发明公开了一种基于盲源分离的雷达抗主瓣干扰方法,包括如下步骤:1)将多个通道混合数据按通道顺序排列接收向量;2)接收向量进行预白化;3)对白化后的接收向量进行盲源分离处理;4)根据雷达目标回波信号的先验知识,解决分离后的目标回波和干扰信号的模糊性。本发明将盲源分离应用于雷达抗主瓣干扰中,利用目标回波信号与干扰信号的不同,将回波信号和干扰信号分离,再利用目标回波信号的先验信息,解决分离后信号的不确定性。不仅能够抑制干扰信号对目标回波的影响,而且能够从混合信号中提取出干扰信号,通过对干扰信号的分析,采取更有
一种基于盲源分离算法的主瓣干扰抑制方法.pdf
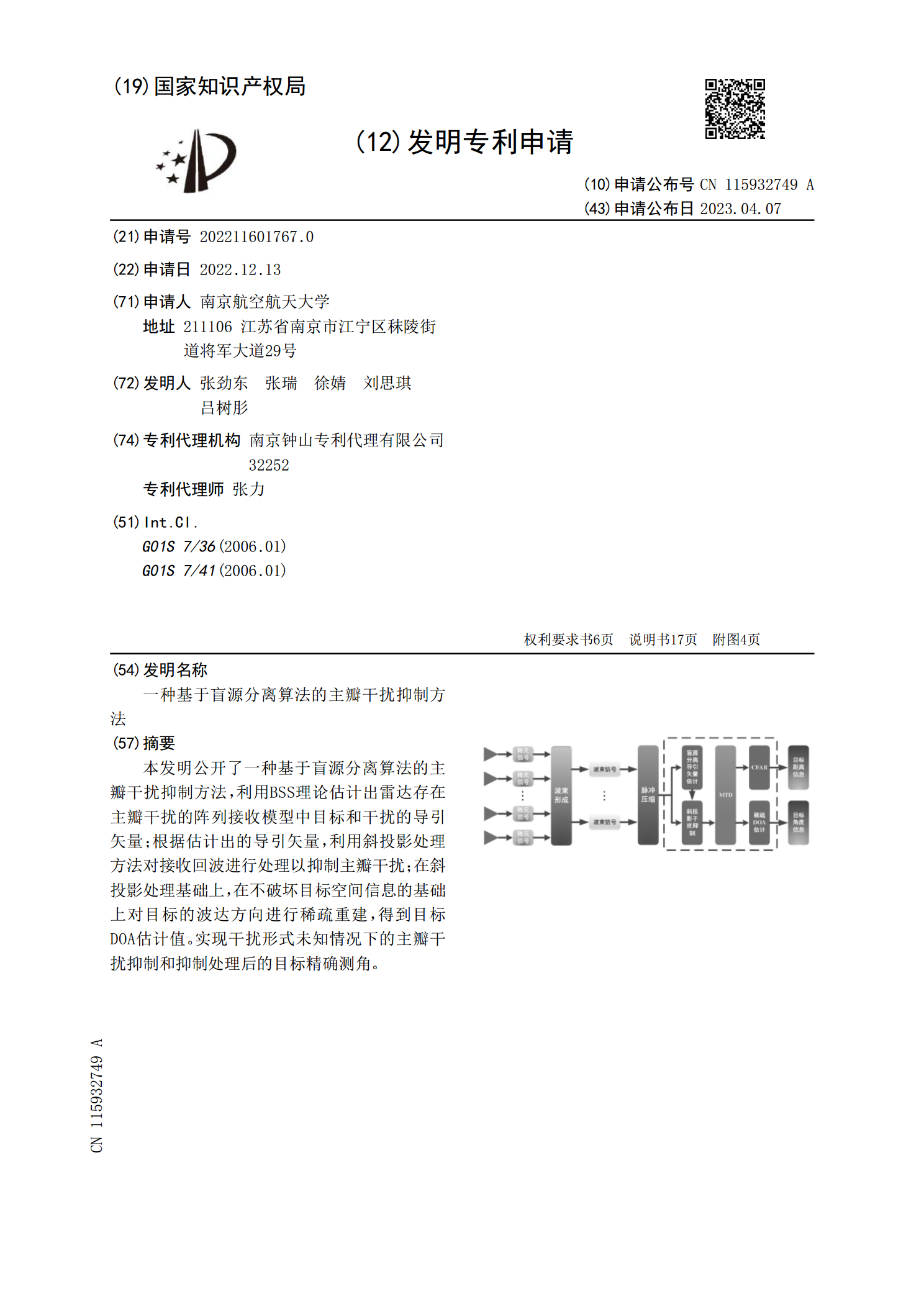
本发明公开了一种基于盲源分离算法的主瓣干扰抑制方法,利用BSS理论估计出雷达存在主瓣干扰的阵列接收模型中目标和干扰的导引矢量;根据估计出的导引矢量,利用斜投影处理方法对接收回波进行处理以抑制主瓣干扰;在斜投影处理基础上,在不破坏目标空间信息的基础上对目标的波达方向进行稀疏重建,得到目标DOA估计值。实现干扰形式未知情况下的主瓣干扰抑制和抑制处理后的目标精确测角。
基于改进人工蜂群的盲源分离抗主瓣干扰方法及装置.pdf
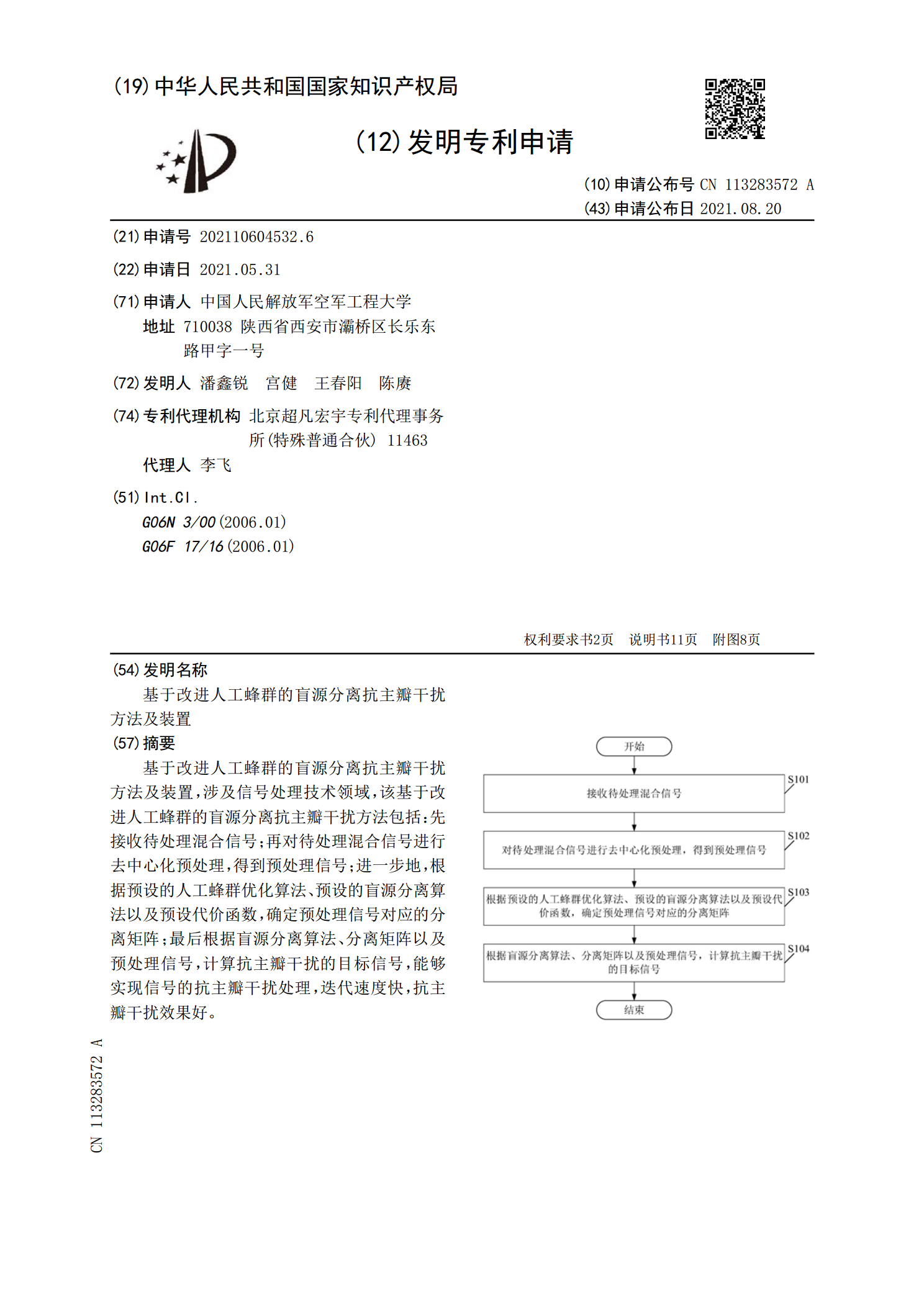
基于改进人工蜂群的盲源分离抗主瓣干扰方法及装置,涉及信号处理技术领域,该基于改进人工蜂群的盲源分离抗主瓣干扰方法包括:先接收待处理混合信号;再对待处理混合信号进行去中心化预处理,得到预处理信号;进一步地,根据预设的人工蜂群优化算法、预设的盲源分离算法以及预设代价函数,确定预处理信号对应的分离矩阵;最后根据盲源分离算法、分离矩阵以及预处理信号,计算抗主瓣干扰的目标信号,能够实现信号的抗主瓣干扰处理,迭代速度快,抗主瓣干扰效果好。

一种基于子空间对消的干扰下的目标角度估计方法.pdf
本发明设计雷达通信技术领域,提出一种基于子空间对消的干扰下的目标角度估计方法,包含步骤:构建回波信号矩阵;计算测试数据的协方差矩阵;对测试数据协方差矩阵进行特征分解,得到目标+干扰子空间;计算辅助数据的协方差矩阵;对辅助数据协方差矩阵进行特征分解,得到干扰子空间;对得到的子空间对应的特征向量求相似度,相关系数高于门限判定为干扰,剔除干扰特征向量后得到目标子空间;计算各稀疏网格点目标函数输出;取最大目标函数输出对应角度作为目标角度估计。通过子空间相似度进行干扰下的角度估计,可以有效进行干扰抑制,在干扰环境中