
一种基于车车通信的多目标协同跟踪的方法.pdf

爱欢****23


1/10

2/10

3/10

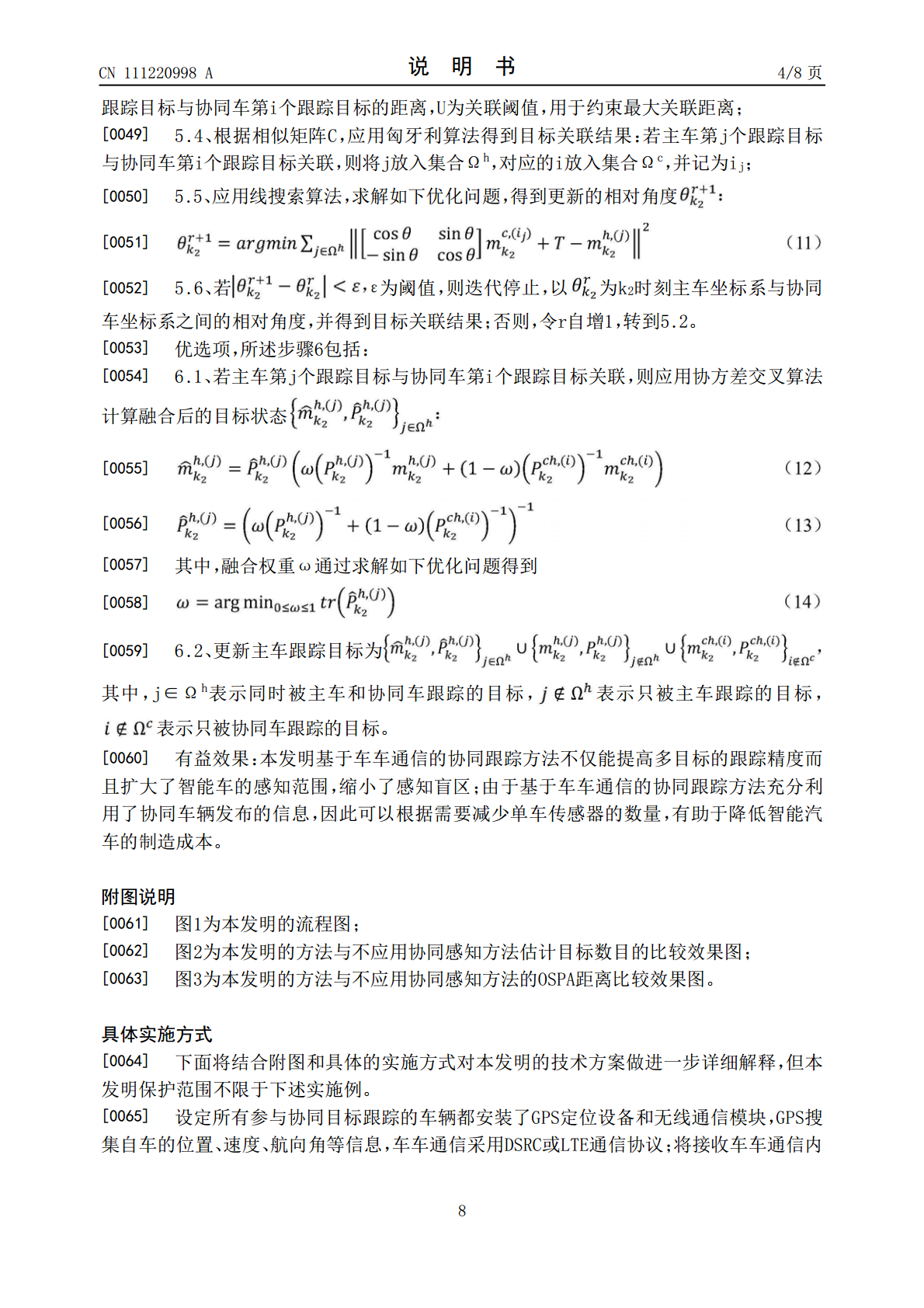
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于车车通信的多目标协同跟踪的方法.pdf
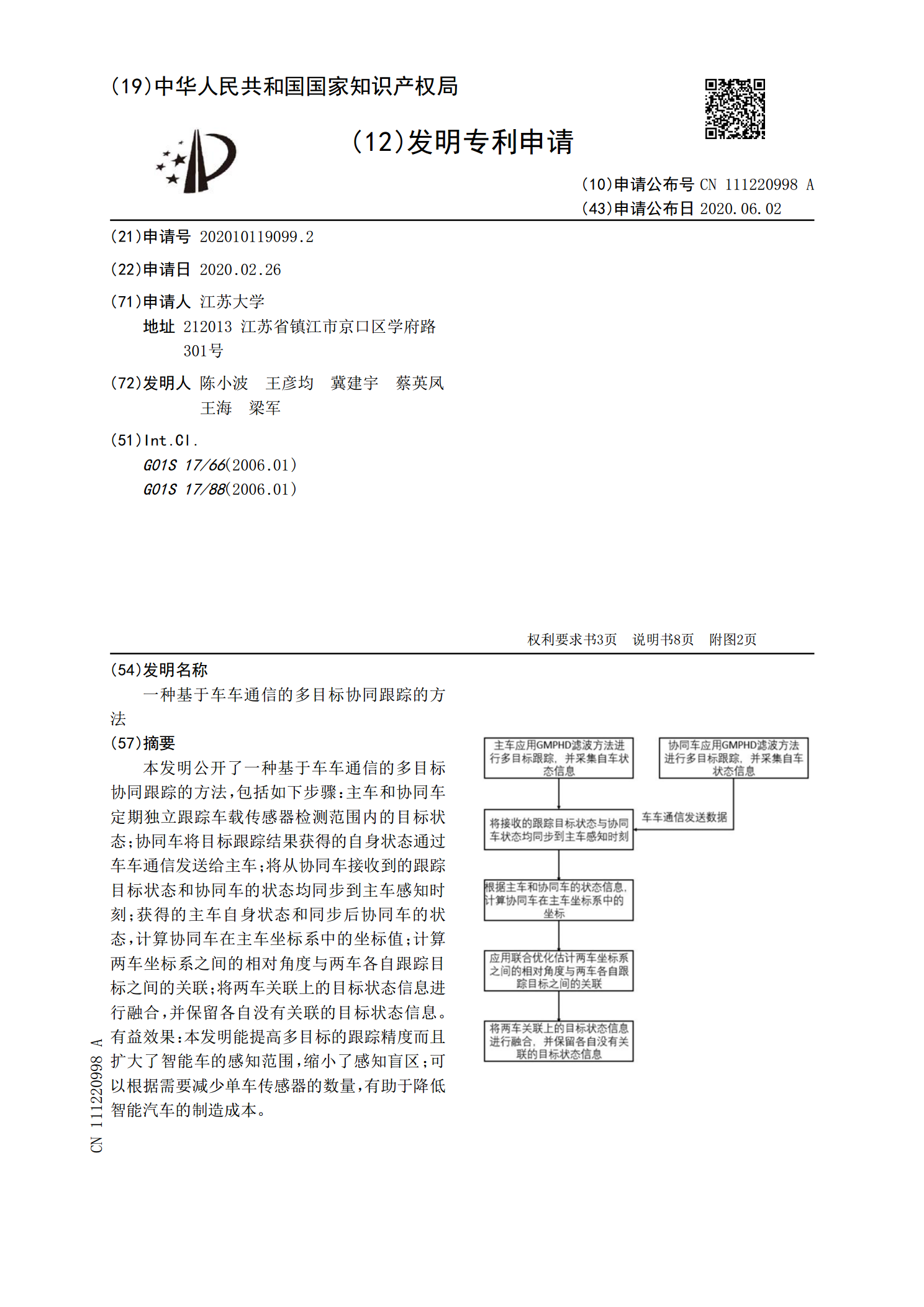
本发明公开了一种基于车车通信的多目标协同跟踪的方法,包括如下步骤:主车和协同车定期独立跟踪车载传感器检测范围内的目标状态;协同车将目标跟踪结果获得的自身状态通过车车通信发送给主车;将从协同车接收到的跟踪目标状态和协同车的状态均同步到主车感知时刻;获得的主车自身状态和同步后协同车的状态,计算协同车在主车坐标系中的坐标值;计算两车坐标系之间的相对角度与两车各自跟踪目标之间的关联;将两车关联上的目标状态信息进行融合,并保留各自没有关联的目标状态信息。有益效果:本发明能提高多目标的跟踪精度而且扩大了智能车的感知范

一种基于车车通信的列车协同编队运行装置及方法.pdf
本发明实施例提供了一种基于车车通信的列车协同编队运行装置及方法,通过列车上设置的IFO、相对测速单元和相对测距单元测量编队列车与编队前车的第一相对速度和第一相对距离。由于相对测速单元和相对测距单元的测量周期均较短,第一相对速度和第一相对距离具有较高的实时性和准确性,ITP在通过第一相对速度和第一相对距离确定目标速度曲线时,能够避免因测速和测距不及时编队列车无法随着编队前车及时更新速度,从而与编队前车间距过大的问题。此外,由于提高了测速和测距的实时性和准确性,ITP在确定目标速度曲线时即便不预留安全距离也能

一种基于车车通信的协同避撞装置及避撞方法.pdf
本发明提供一种基于车车通信的协同避撞装置,属于智能交通/汽车安全控制技术领域,包括车辆运行信息采集单元、车车通信单元、信息处理控制单元、数据存储单元、报警单元和执行单元。车辆运行信息采集单元包括轮速传感器和测距模块。本发明增加了车辆行驶的安全保证,但执行协同避撞的各个车辆必须同时加装协同避撞装置,单辆车只能执行普通避撞装置的功能;本发明带有车车通信单元,可以实时采集周围车辆车距,车速等信息,并与周围的车辆进行实时信息交互;当出现车距小于安全车距时,后车信息处理控制单元会通过计算期望减速度完成减速避撞;当仅

一种基于跟踪链的多目标跟踪方法及系统.pdf
本发明提供了一种基于跟踪链的多目标跟踪方法及系统;其中,所述方法包括:按照预设间隔对监控图像中的第一目标对象进行识别,根据识别结果生成第一跟踪链;当所述第一目标对象识别失败时,修改所述第一跟踪链的状态;对新识别到的第二目标对象生成第二跟踪链;计算所述第一跟踪链和所述第二跟踪链的相似度,根据所述相似度将所述第一跟踪链和所述第二跟踪链进行串接;本发明的方法能够简单、高效地实现对多目标对象的同步跟踪,而且不会因为遮挡而造成跟踪失败,具有更高的可靠性。
无盲区多目标协同跟踪方法及系统.pdf
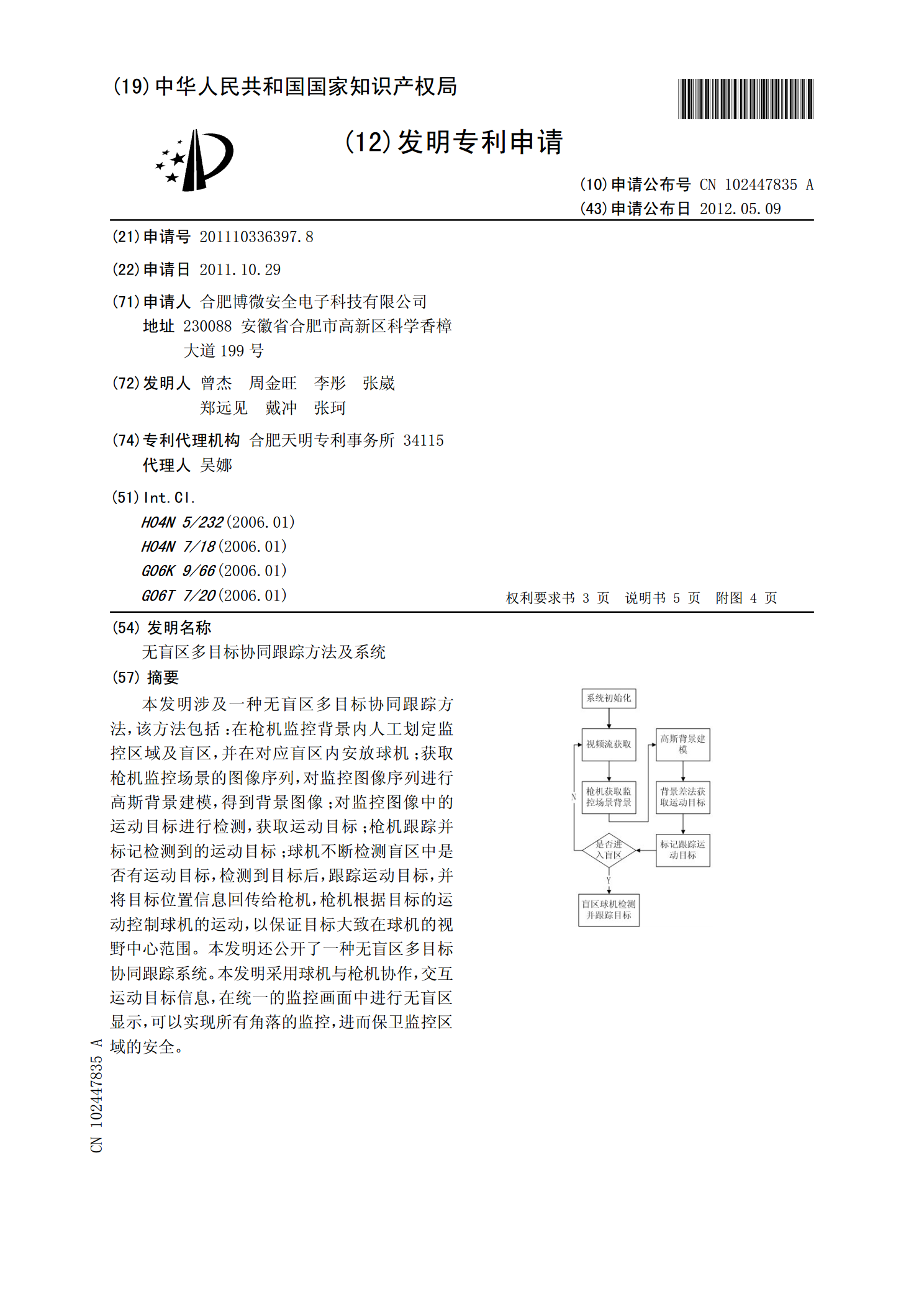
本发明涉及一种无盲区多目标协同跟踪方法,该方法包括:在枪机监控背景内人工划定监控区域及盲区,并在对应盲区内安放球机;获取枪机监控场景的图像序列,对监控图像序列进行高斯背景建模,得到背景图像;对监控图像中的运动目标进行检测,获取运动目标;枪机跟踪并标记检测到的运动目标;球机不断检测盲区中是否有运动目标,检测到目标后,跟踪运动目标,并将目标位置信息回传给枪机,枪机根据目标的运动控制球机的运动,以保证目标大致在球机的视野中心范围。本发明还公开了一种无盲区多目标协同跟踪系统。本发明采用球机与枪机协作,交互运动目标