
一种大口径反射镜支撑装置.pdf

雨巷****珺琦

1/7
2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种大口径反射镜支撑装置.pdf
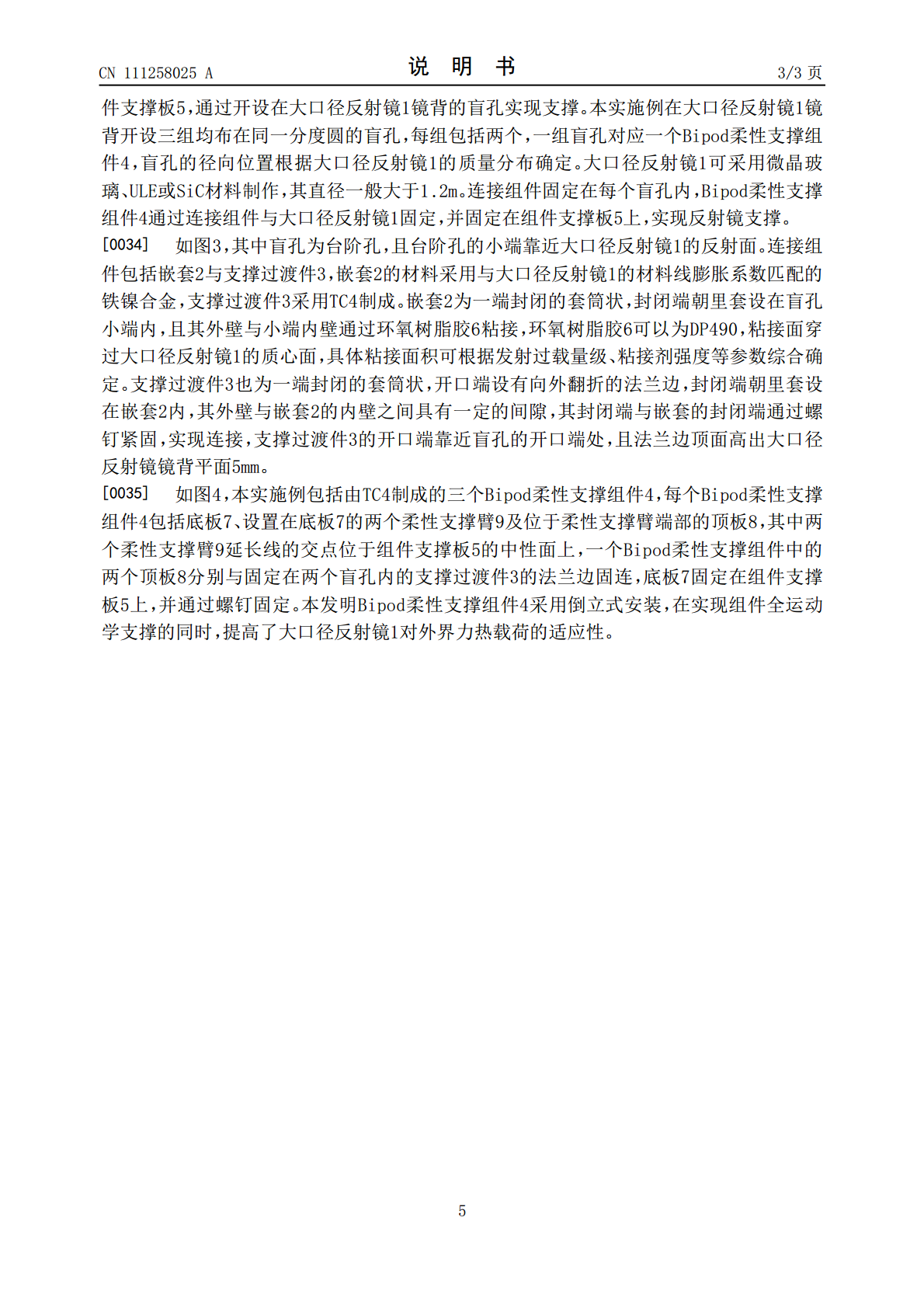
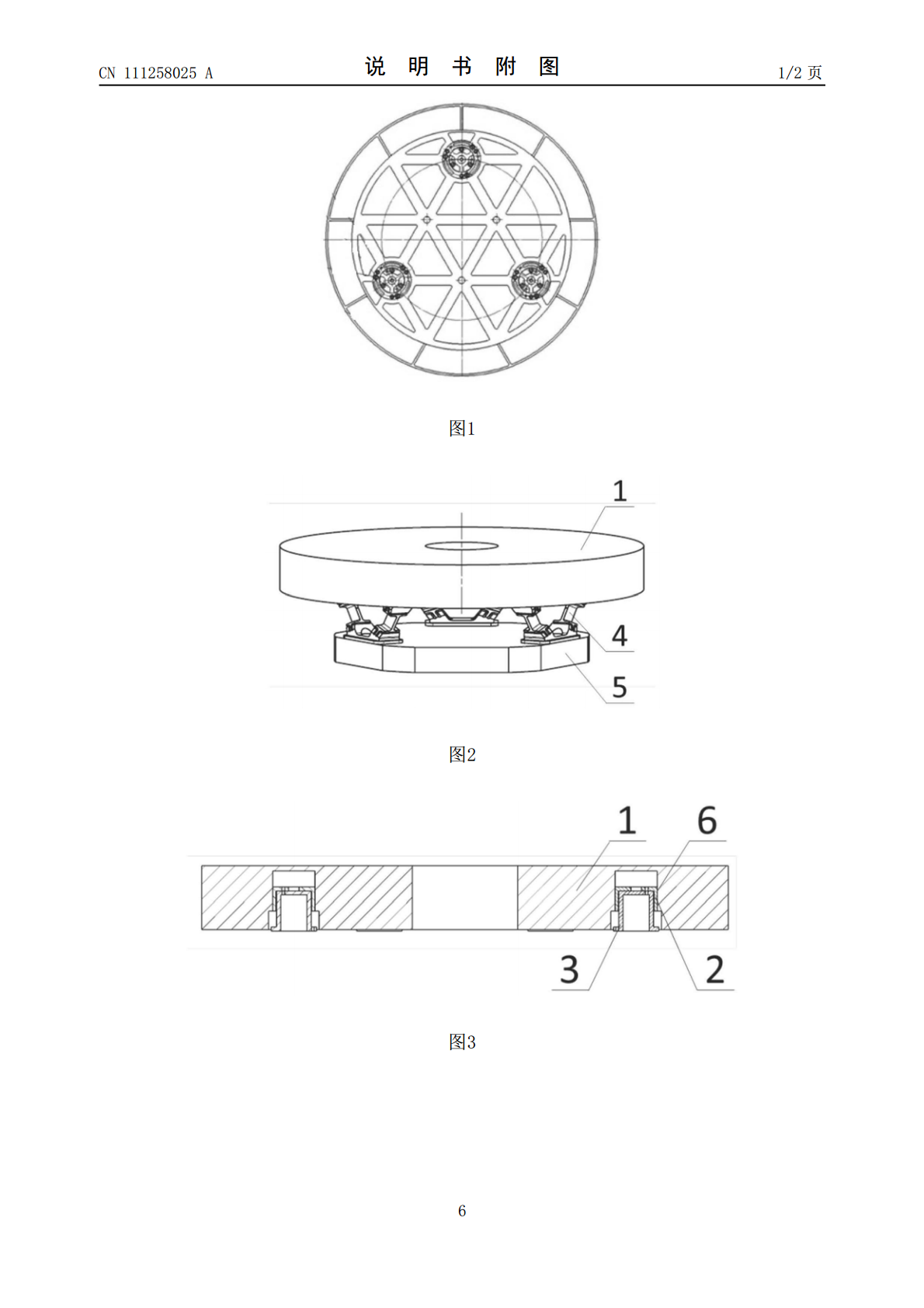
本发明涉及一种大口径反射镜支撑装置,解决现有结构难以承受较大发射过载及获得高面形精度的问题,包括开设在大口径反射镜镜背的N个盲孔、位于每个盲孔内的连接组件、与连接组件连接的Bipod柔性支撑组件及与Bipod柔性支撑组件连接的组件支撑板;N个盲孔位于同一分度圆上,盲孔为台阶盲孔;连接组件包括嵌套与支撑过渡件;嵌套同轴套设在反射镜镜背盲孔小端内,且其外周面与盲孔小端内壁粘接;支撑过渡件为套筒状,同轴套设并固定在嵌套内部,支撑过渡件的外壁与嵌套的内壁预留一定间隙,且支撑过渡件开口端设有法兰边;采用三组倒立式B
一种大口径反射镜的侧支撑结构及侧支撑装置.pdf
本发明公开了一种大口径反射镜的侧支撑结构,包括用以形成Whiffletree结构的至少一级横梁和与第一级横梁两端分别对应设置的杠杆、支撑杆和连接杆;最后一级横梁的中间与位于反射镜下方的机架转动连接,第一级横梁的两端分别通过球销副与对应的连接杆的一端连接,各连接杆的另一端与对应的杠杆的一端通过球销副连接,各杠杆的另一端与对应的支撑杆的一端通过球面副连接,各支撑杆的另一端分别与反射镜的侧面通过球销副连接,杠杆的中间与机架转动连接。本发明还公开了一种包括上述侧支撑结构的侧支撑装置。应用该大口径反射镜的侧支撑结构
一种背支撑形式大口径反射镜支撑结构.pdf
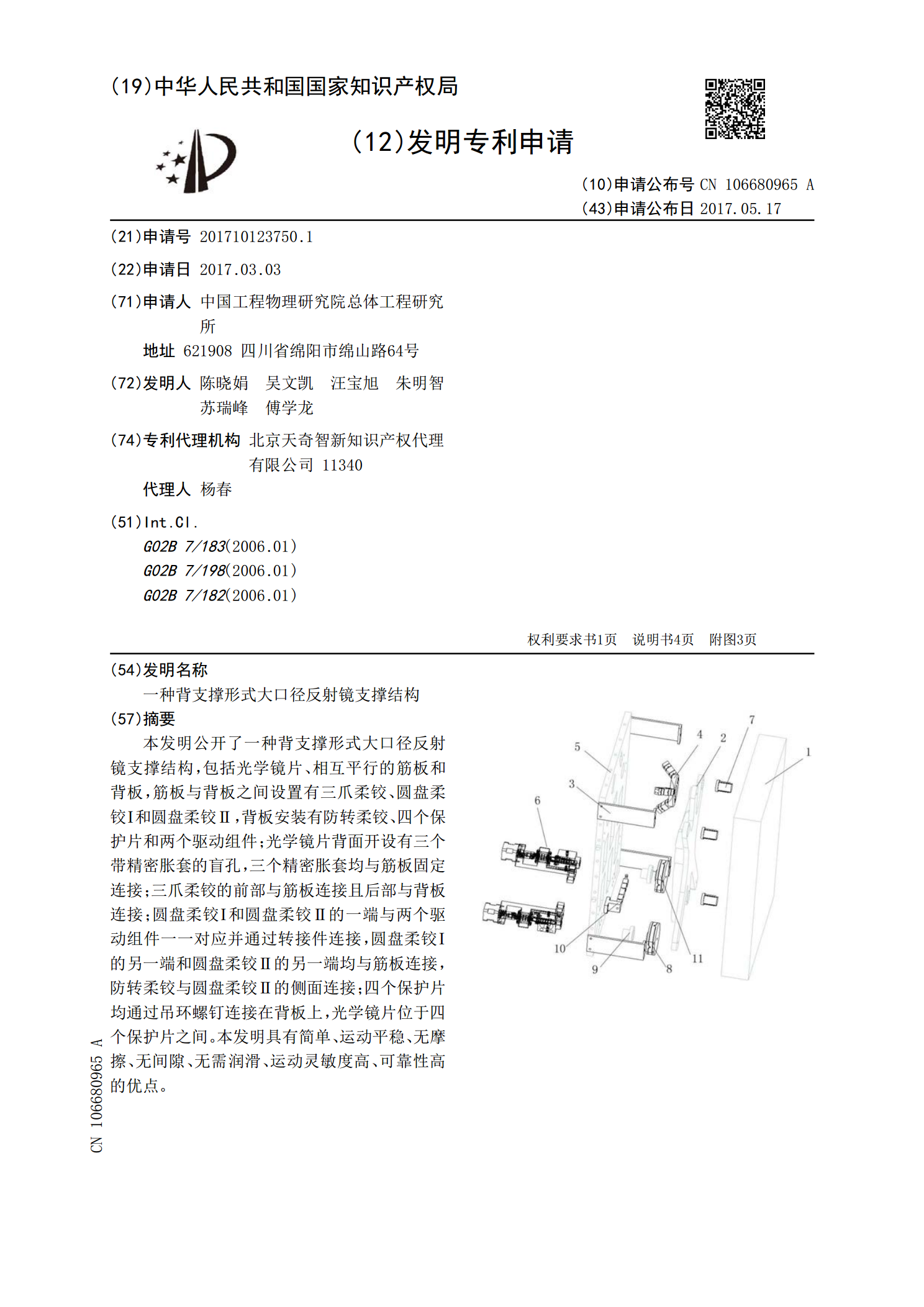
本发明公开了一种背支撑形式大口径反射镜支撑结构,包括光学镜片、相互平行的筋板和背板,筋板与背板之间设置有三爪柔铰、圆盘柔铰Ⅰ和圆盘柔铰Ⅱ,背板安装有防转柔铰、四个保护片和两个驱动组件;光学镜片背面开设有三个带精密胀套的盲孔,三个精密胀套均与筋板固定连接;三爪柔铰的前部与筋板连接且后部与背板连接;圆盘柔铰Ⅰ和圆盘柔铰Ⅱ的一端与两个驱动组件一一对应并通过转接件连接,圆盘柔铰Ⅰ的另一端和圆盘柔铰Ⅱ的另一端均与筋板连接,防转柔铰与圆盘柔铰Ⅱ的侧面连接;四个保护片均通过吊环螺钉连接在背板上,光学镜片位于四个保护片之
一种大口径反射镜轴向支撑垫定位装置及方法.pdf
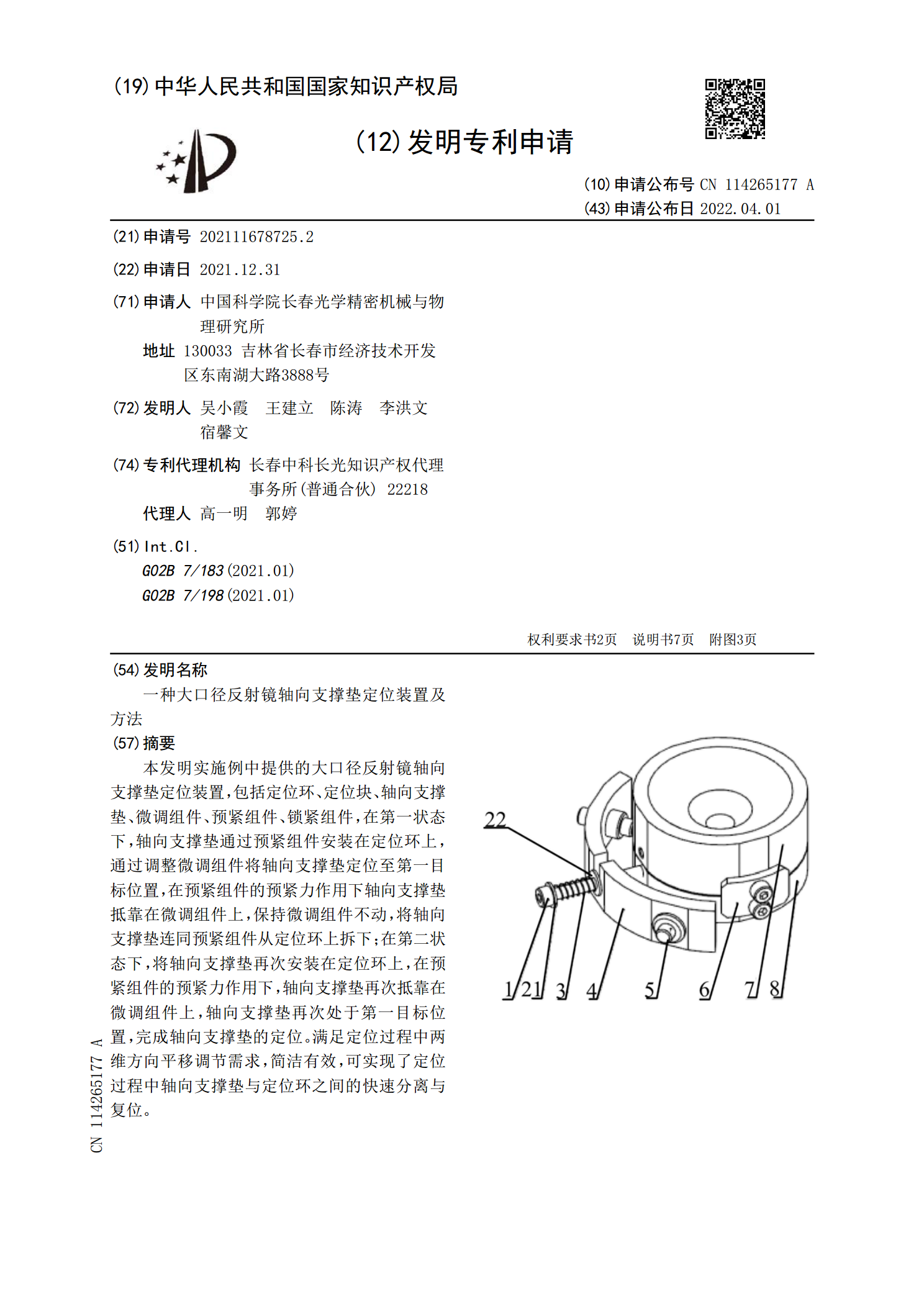
本发明实施例中提供的大口径反射镜轴向支撑垫定位装置,包括定位环、定位块、轴向支撑垫、微调组件、预紧组件、锁紧组件,在第一状态下,轴向支撑垫通过预紧组件安装在定位环上,通过调整微调组件将轴向支撑垫定位至第一目标位置,在预紧组件的预紧力作用下轴向支撑垫抵靠在微调组件上,保持微调组件不动,将轴向支撑垫连同预紧组件从定位环上拆下;在第二状态下,将轴向支撑垫再次安装在定位环上,在预紧组件的预紧力作用下,轴向支撑垫再次抵靠在微调组件上,轴向支撑垫再次处于第一目标位置,完成轴向支撑垫的定位。满足定位过程中两维方向平移调
一种大口径轻质反射镜柔性限位支撑装置及安装方法.pdf
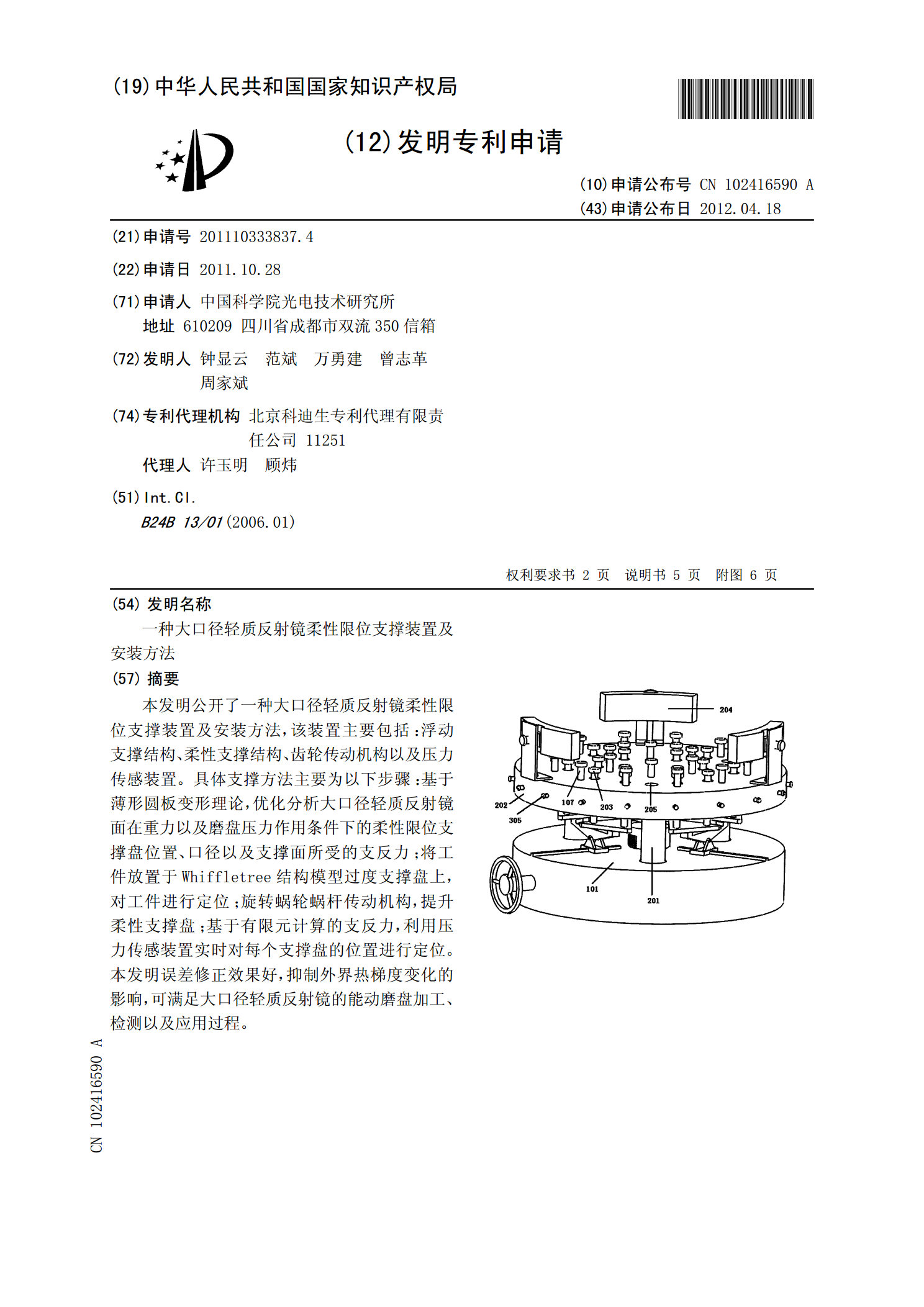
本发明公开了一种大口径轻质反射镜柔性限位支撑装置及安装方法,该装置主要包括:浮动支撑结构、柔性支撑结构、齿轮传动机构以及压力传感装置。具体支撑方法主要为以下步骤:基于薄形圆板变形理论,优化分析大口径轻质反射镜面在重力以及磨盘压力作用条件下的柔性限位支撑盘位置、口径以及支撑面所受的支反力;将工件放置于Whiffletree结构模型过度支撑盘上,对工件进行定位;旋转蜗轮蜗杆传动机构,提升柔性支撑盘;基于有限元计算的支反力,利用压力传感装置实时对每个支撑盘的位置进行定位。本发明误差修正效果好,抑制外界热梯度变化