
基于卷积神经网络修复帧差法获取全景前景目标的方法.pdf

志玉****爱啊


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于卷积神经网络修复帧差法获取全景前景目标的方法.pdf
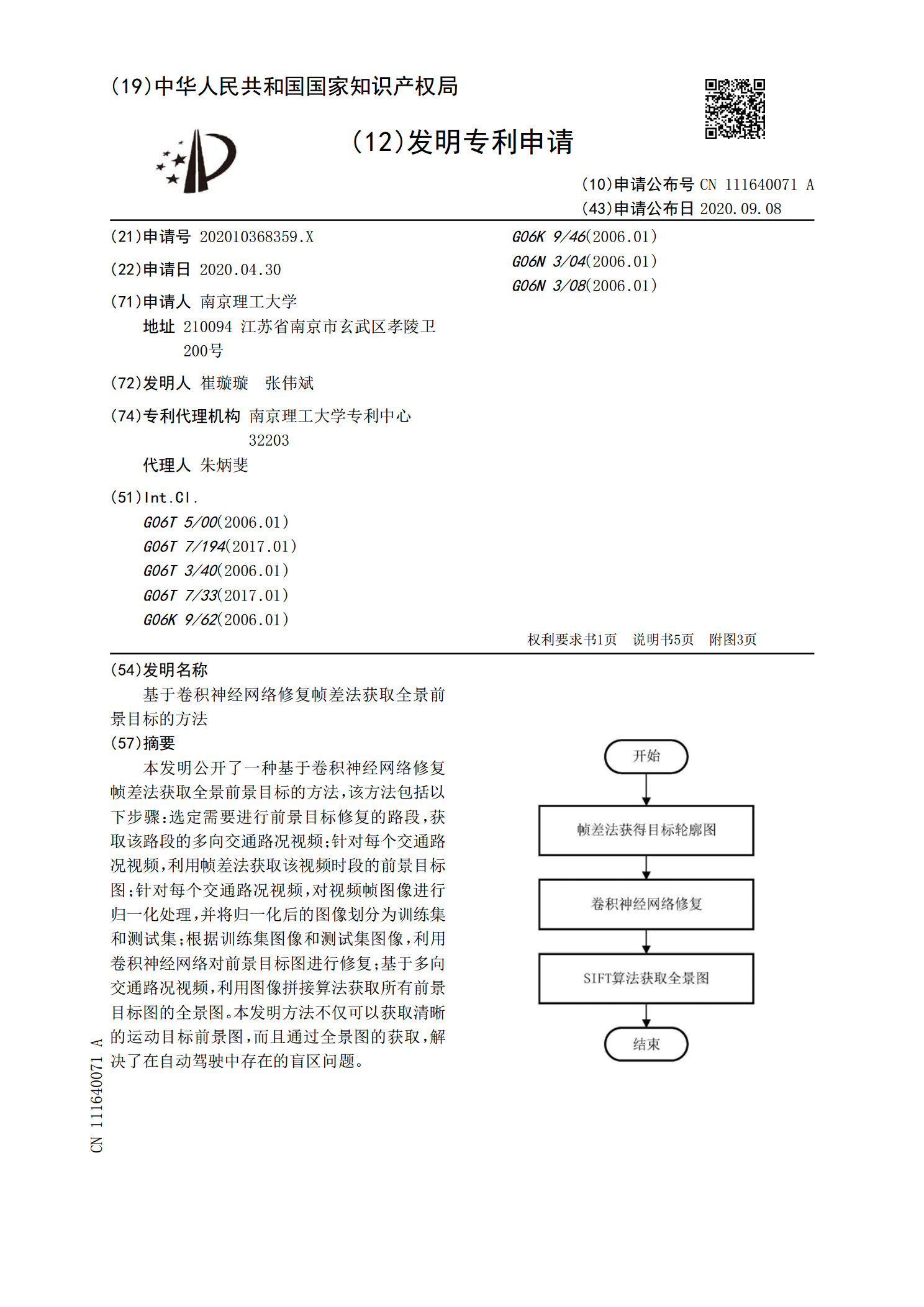
本发明公开了一种基于卷积神经网络修复帧差法获取全景前景目标的方法,该方法包括以下步骤:选定需要进行前景目标修复的路段,获取该路段的多向交通路况视频;针对每个交通路况视频,利用帧差法获取该视频时段的前景目标图;针对每个交通路况视频,对视频帧图像进行归一化处理,并将归一化后的图像划分为训练集和测试集;根据训练集图像和测试集图像,利用卷积神经网络对前景目标图进行修复;基于多向交通路况视频,利用图像拼接算法获取所有前景目标图的全景图。本发明方法不仅可以获取清晰的运动目标前景图,而且通过全景图的获取,解决了在自动驾

基于深度帧差卷积神经网络的运动目标检测方法研究.docx
基于深度帧差卷积神经网络的运动目标检测方法研究需要注意的是,由于深度学习技术涉及到一定的数学知识和专业术语,本文将在必要的地方对相关的概念进行解释和定义。一、引言随着计算机视觉技术的发展和普及,运动目标检测已经成为了计算机视觉领域中的重要研究方向。运动目标检测是指对运动中的目标进行识别和跟踪,并将其从动态背景中分离出来的技术。在实际应用中,运动目标检测对于视频监控、自动驾驶、广告识别等领域都有着重要的作用。传统的运动目标检测方法主要依赖于背景建模和帧差技术。但是,这些方法对于光照、阴影、天气等环境变化敏感

一种基于深度帧差卷积神经网络的运动目标检测方法.pdf
本发明公开了一种基于深度帧差卷积神经网络的运动目标检测方法,属于计算机视觉领域,一种基于深度帧差卷积神经网络的运动目标检测方法,本发明的DifferenceNet具有孪生Encoder‑Decoder结构,通过输入两帧图像与对应的监督标签,可以学习两帧图像之间的时序信息与差异特征;AppearanceNet具有Encoder‑Decoder结构,通过主干提取t帧图像的表观信息,然后通过时‑空信息融合,对t+1帧图像中的运动目标进行预测;AppearanceNet还通过多尺度特征图融合和逐步上采样来保留多尺

基于卷积神经网络的图像全景分割.docx
基于卷积神经网络的图像全景分割标题:基于卷积神经网络的图像全景分割摘要:图像全景分割是图像处理和计算机视觉领域的重要任务之一,其目的是将输入的图像分割为不同的区域,每个区域代表图像中的一个对象或背景。传统的全景分割方法通常基于手工设计的特征和机器学习算法,其性能受限于特征的表达能力和算法的鲁棒性。近年来,深度学习的快速发展为图像全景分割带来了新的解决方案。本论文将介绍基于卷积神经网络的图像全景分割算法,主要包括网络结构设计、训练过程和实验结果等内容。关键词:图像全景分割,卷积神经网络,深度学习,特征表达,
基于差帧法的跳绳真假判断方法及系统.pdf
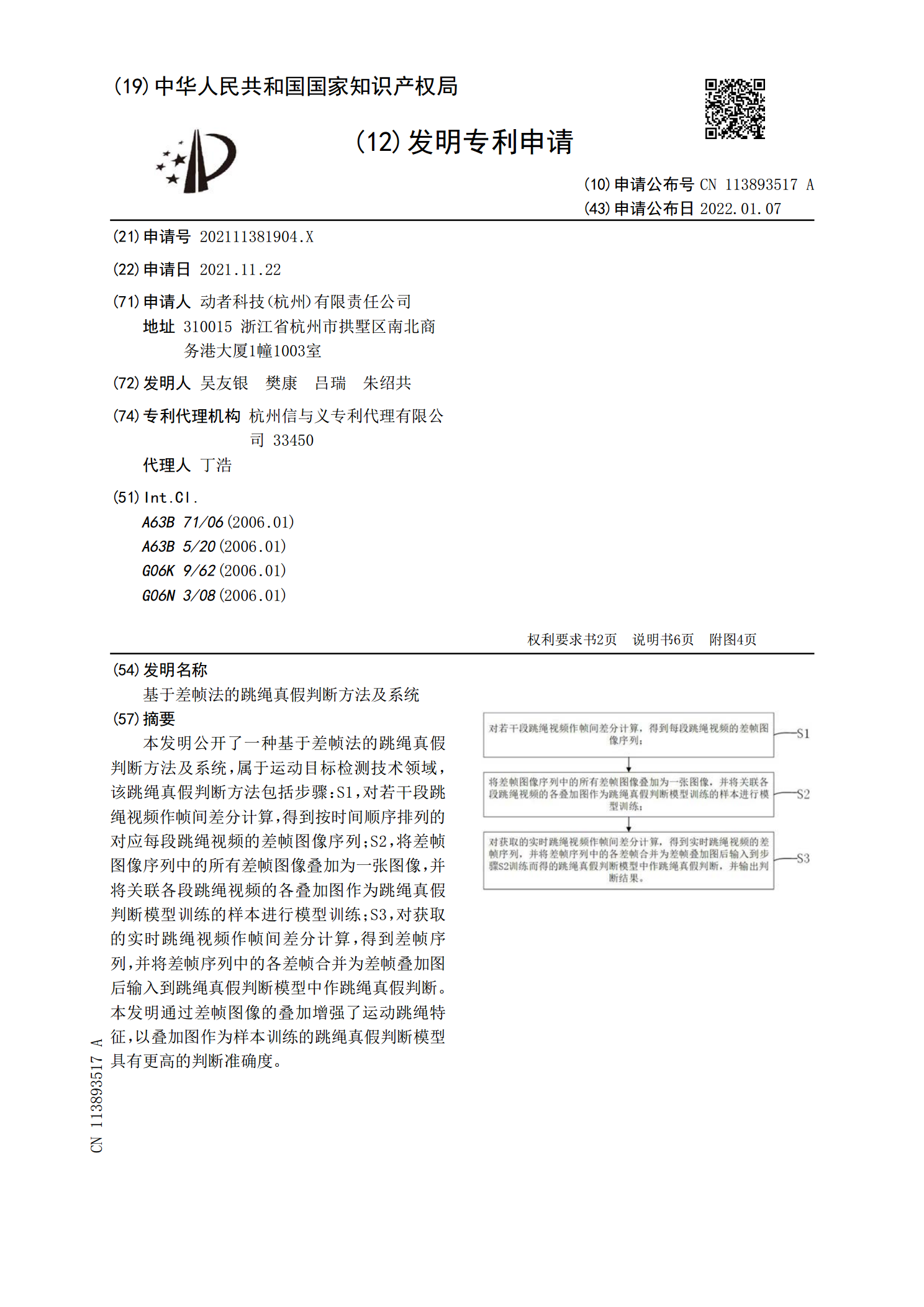
本发明公开了一种基于差帧法的跳绳真假判断方法及系统,属于运动目标检测技术领域,该跳绳真假判断方法包括步骤:S1,对若干段跳绳视频作帧间差分计算,得到按时间顺序排列的对应每段跳绳视频的差帧图像序列;S2,将差帧图像序列中的所有差帧图像叠加为一张图像,并将关联各段跳绳视频的各叠加图作为跳绳真假判断模型训练的样本进行模型训练;S3,对获取的实时跳绳视频作帧间差分计算,得到差帧序列,并将差帧序列中的各差帧合并为差帧叠加图后输入到跳绳真假判断模型中作跳绳真假判断。本发明通过差帧图像的叠加增强了运动跳绳特征,以叠加图