
信息采集方法、设备及存储介质.pdf

一条****彩妍

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
信息采集方法、设备及存储介质.pdf
本申请实施例提供一种信息采集方法、设备及存储介质。在本申请实施例中,自主移动设备可通过结构光模组采集环境信息,并通过执行补漏动作补充采集结构光模组盲区范围内的障碍物信息,使自主移移动设备在执行任务过程中探测到更丰富准确的环境信息,避免遗漏较低矮的障碍物信息。进一步,根据探测到的障碍物信息可实现避障和构建环境地图,为后续的执行作业任务及避障提供基础。

一种信息采集方法、信息采集设备及存储介质.pdf
本申请提供了一种信息采集方法及信息采集设备,该信息采集方法包括:通过传感器采集目标试纸的检测结果信息,其中,目标试纸为使用过的艾滋病病毒自我检测HIVST试纸;发送所述检测结果信息至信息采集中心。信息采集中心可以采集到目标试纸的检测结果信息,解决了由于多数自检动机为发生了高危性行为,加之条件限制未能及时对潜在感染人群进行初筛和复核,可能使得对HIV阳性流行情况的估计有较大偏差,HIVST的目标人群——性少数群体特别是男男同性性行为者之间HIV感染风险的高危人群,该人群将自检结果回传给卫生服务人员的自觉性较
信息采集方法、系统及存储介质.pdf
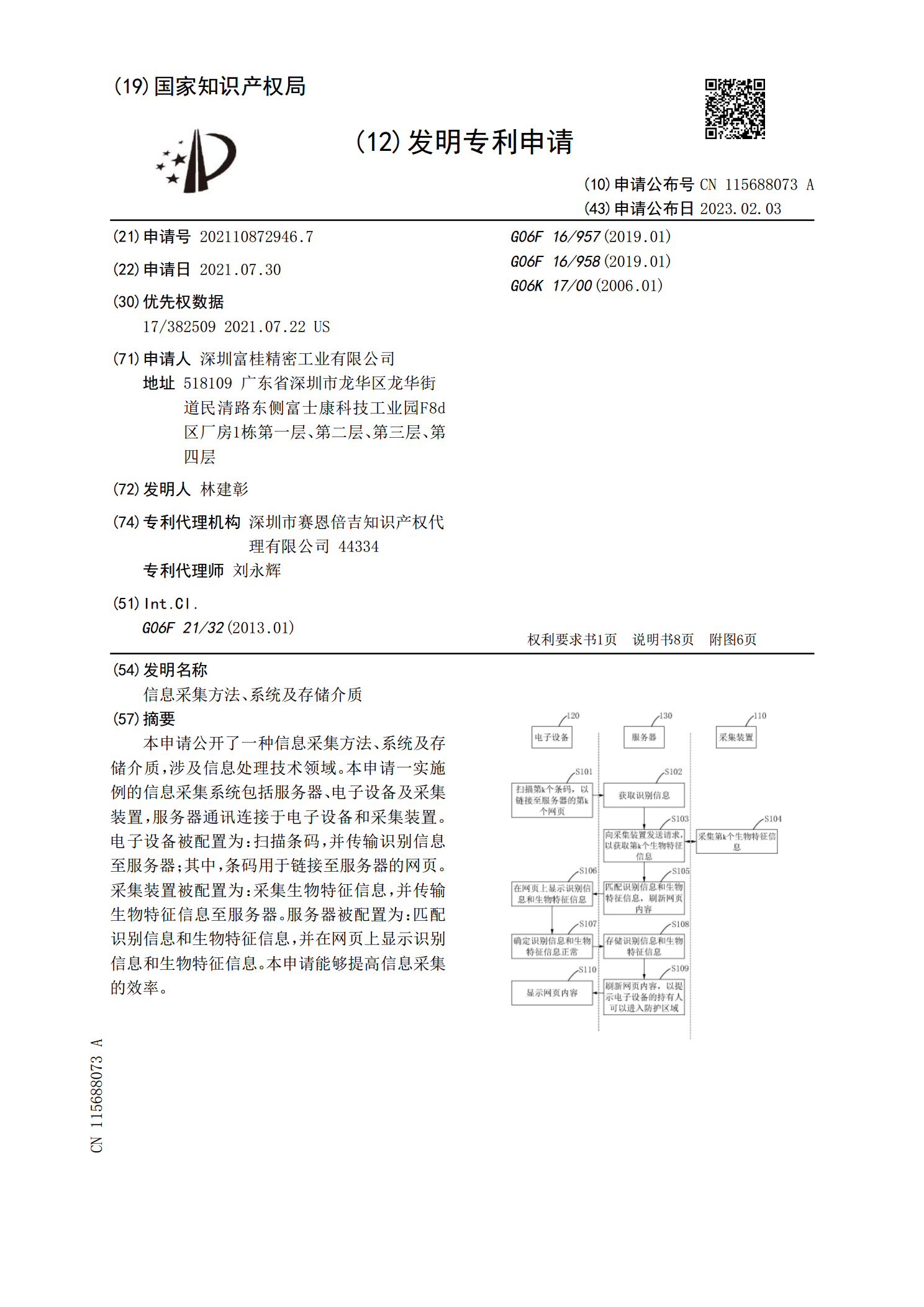
本申请公开了一种信息采集方法、系统及存储介质,涉及信息处理技术领域。本申请一实施例的信息采集系统包括服务器、电子设备及采集装置,服务器通讯连接于电子设备和采集装置。电子设备被配置为:扫描条码,并传输识别信息至服务器;其中,条码用于链接至服务器的网页。采集装置被配置为:采集生物特征信息,并传输生物特征信息至服务器。服务器被配置为:匹配识别信息和生物特征信息,并在网页上显示识别信息和生物特征信息。本申请能够提高信息采集的效率。

内存访问信息的采集方法、计算设备及存储介质.pdf
本申请实施例提供一种内存访问信息的采集方法、计算设备及存储介质,在本申请实施例中,获取宿主机中预留内存的分配信息,预留内存可用于分配至部署在宿主机上的虚拟设备;根据分配信息,从对应被分配内存的页表中确定被分配内存是否被访问;根据确定的是否被访问的结果,采集被分配内存对应的访问信息。其中,根据分配信息,从对应被分配内存的页表中确定被分配内存是否被访问;根据确定的是否被访问的结果,采集被分配内存对应的访问信息,可以实现自动地以及准确地收集宿主机中预留内存的被虚拟设备访问的情况。从而可以对该访问信息进行监测,以
信息采集方法、装置、电子设备及可读存储介质.pdf
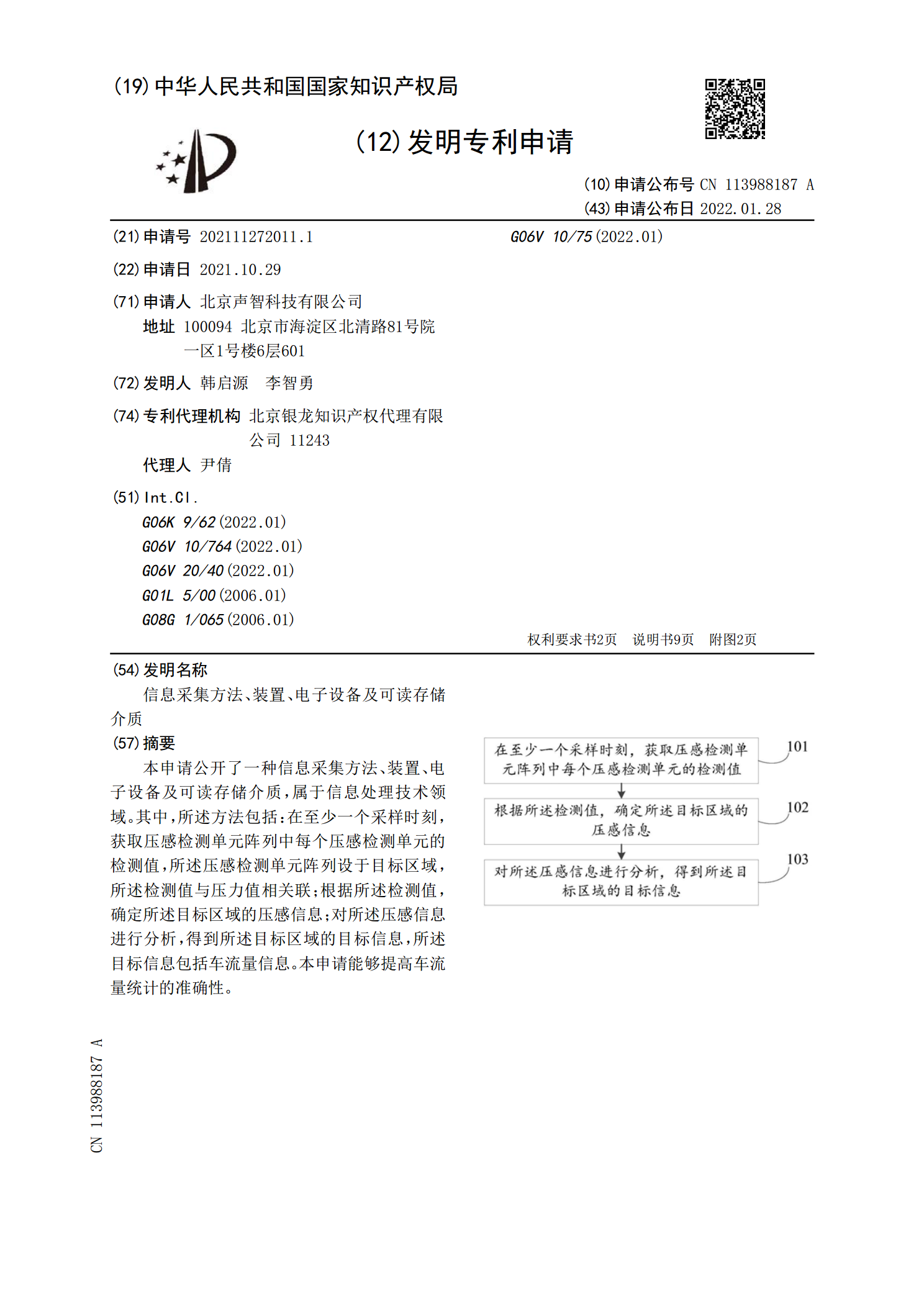
本申请公开了一种信息采集方法、装置、电子设备及可读存储介质,属于信息处理技术领域。其中,所述方法包括:在至少一个采样时刻,获取压感检测单元阵列中每个压感检测单元的检测值,所述压感检测单元阵列设于目标区域,所述检测值与压力值相关联;根据所述检测值,确定所述目标区域的压感信息;对所述压感信息进行分析,得到所述目标区域的目标信息,所述目标信息包括车流量信息。本申请能够提高车流量统计的准确性。