
打磨设备、控制方法、控制系统和存储介质.pdf

小忆****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
打磨设备、控制方法、控制系统和存储介质.pdf
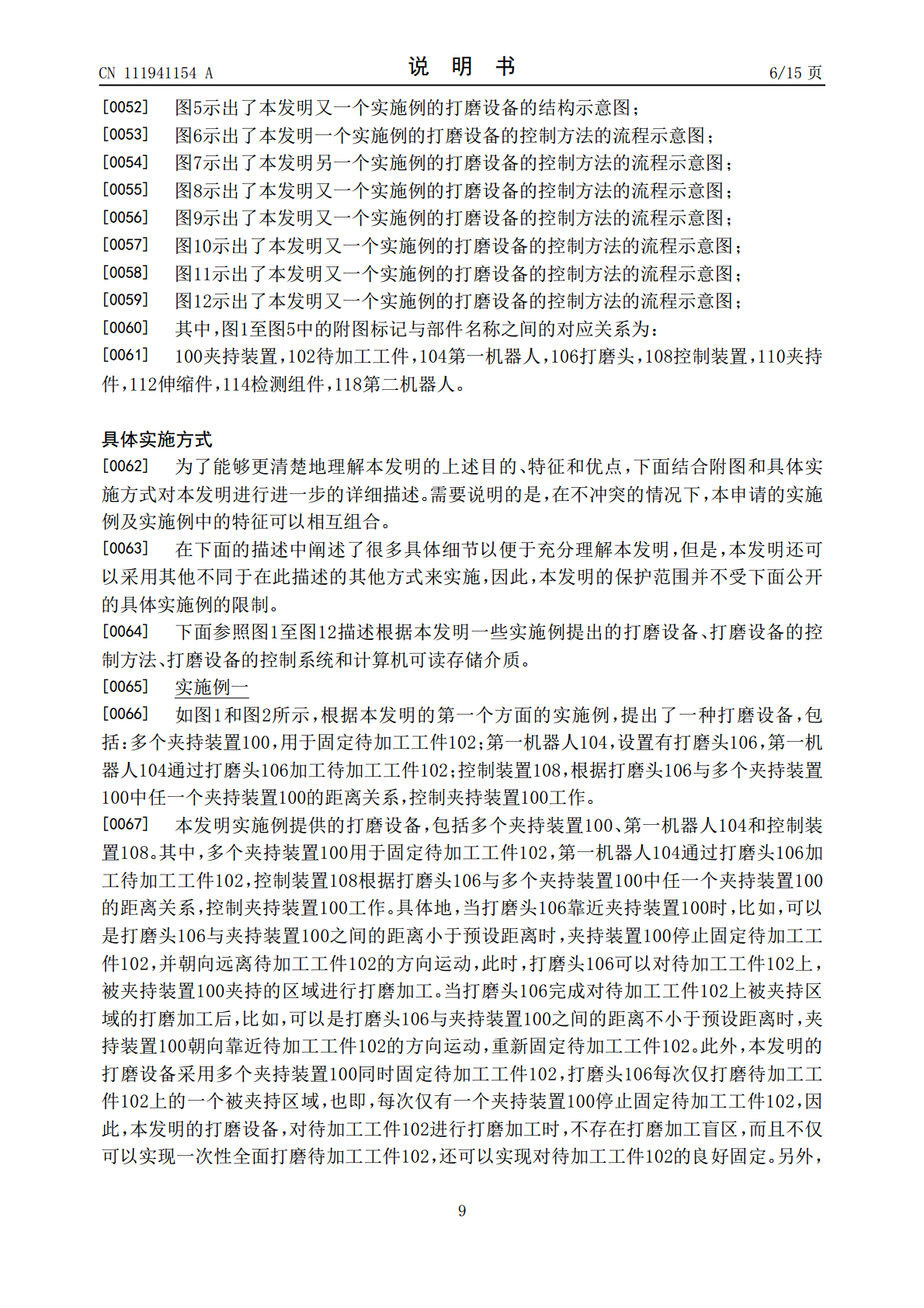
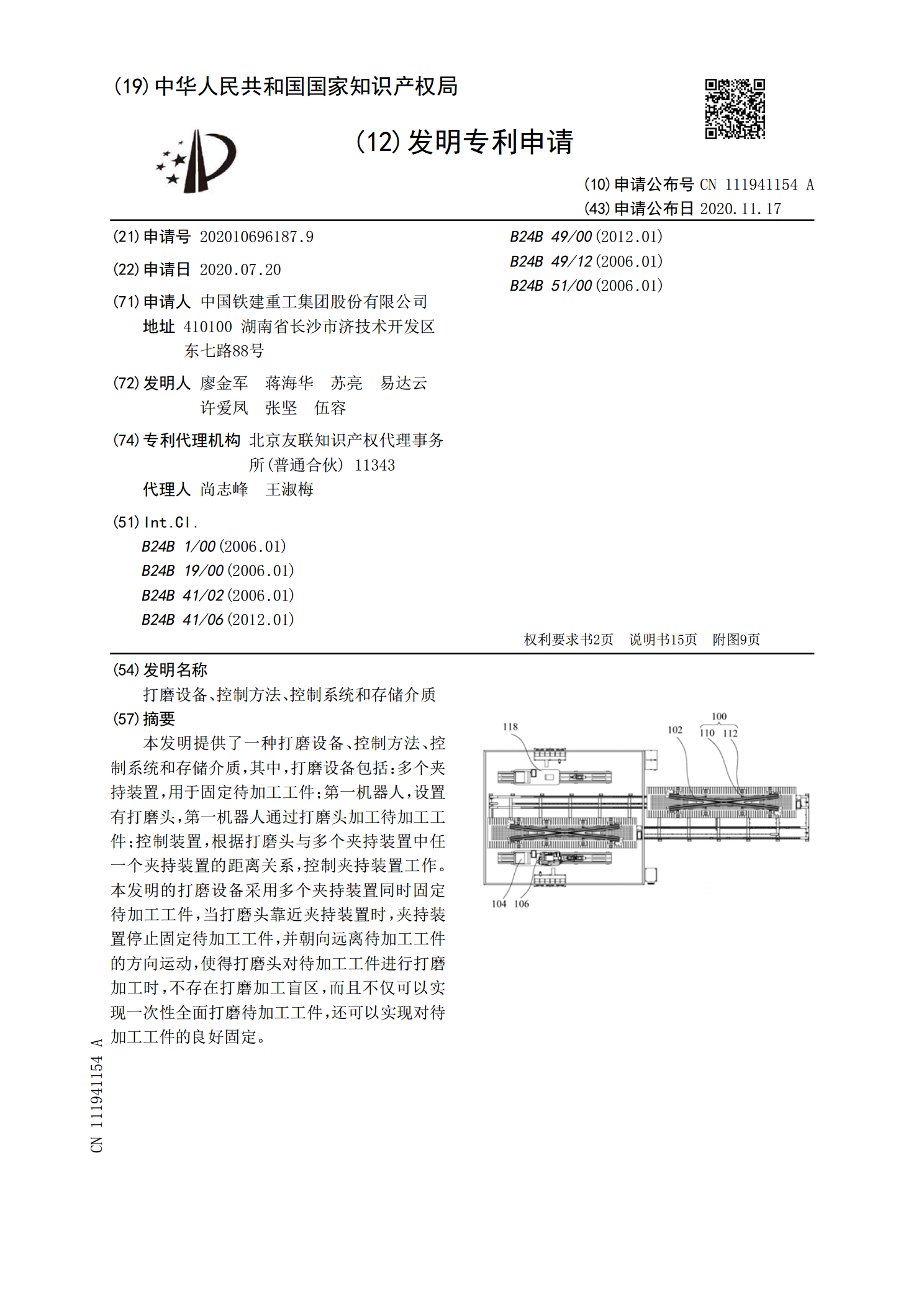
本发明提供了一种打磨设备、控制方法、控制系统和存储介质,其中,打磨设备包括:多个夹持装置,用于固定待加工工件;第一机器人,设置有打磨头,第一机器人通过打磨头加工待加工工件;控制装置,根据打磨头与多个夹持装置中任一个夹持装置的距离关系,控制夹持装置工作。本发明的打磨设备采用多个夹持装置同时固定待加工工件,当打磨头靠近夹持装置时,夹持装置停止固定待加工工件,并朝向远离待加工工件的方向运动,使得打磨头对待加工工件进行打磨加工时,不存在打磨加工盲区,而且不仅可以实现一次性全面打磨待加工工件,还可以实现对待加工工件
智能设备控制系统、方法、智能设备和存储介质.pdf
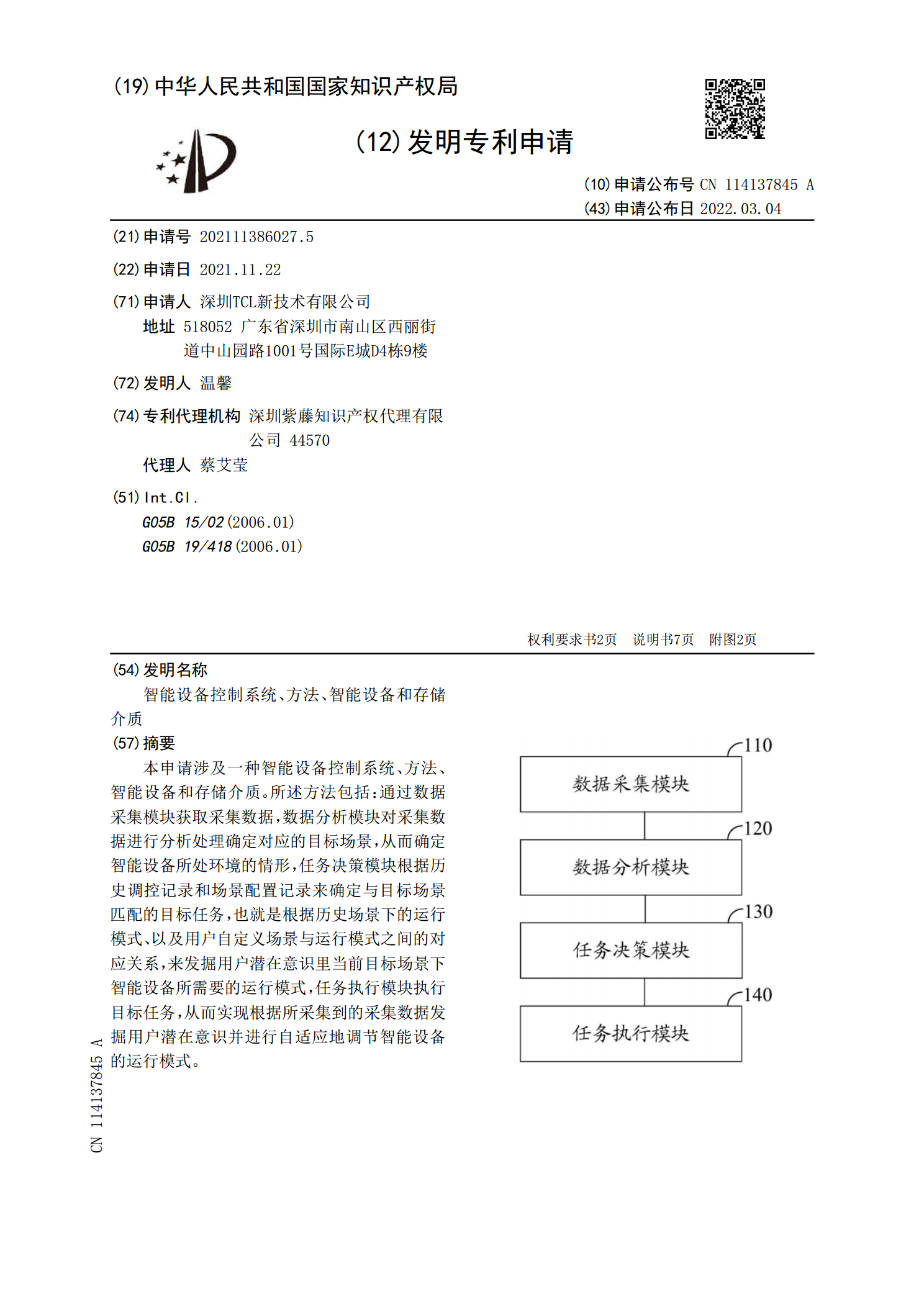
本申请涉及一种智能设备控制系统、方法、智能设备和存储介质。所述方法包括:通过数据采集模块获取采集数据,数据分析模块对采集数据进行分析处理确定对应的目标场景,从而确定智能设备所处环境的情形,任务决策模块根据历史调控记录和场景配置记录来确定与目标场景匹配的目标任务,也就是根据历史场景下的运行模式、以及用户自定义场景与运行模式之间的对应关系,来发掘用户潜在意识里当前目标场景下智能设备所需要的运行模式,任务执行模块执行目标任务,从而实现根据所采集到的采集数据发掘用户潜在意识并进行自适应地调节智能设备的运行模式。
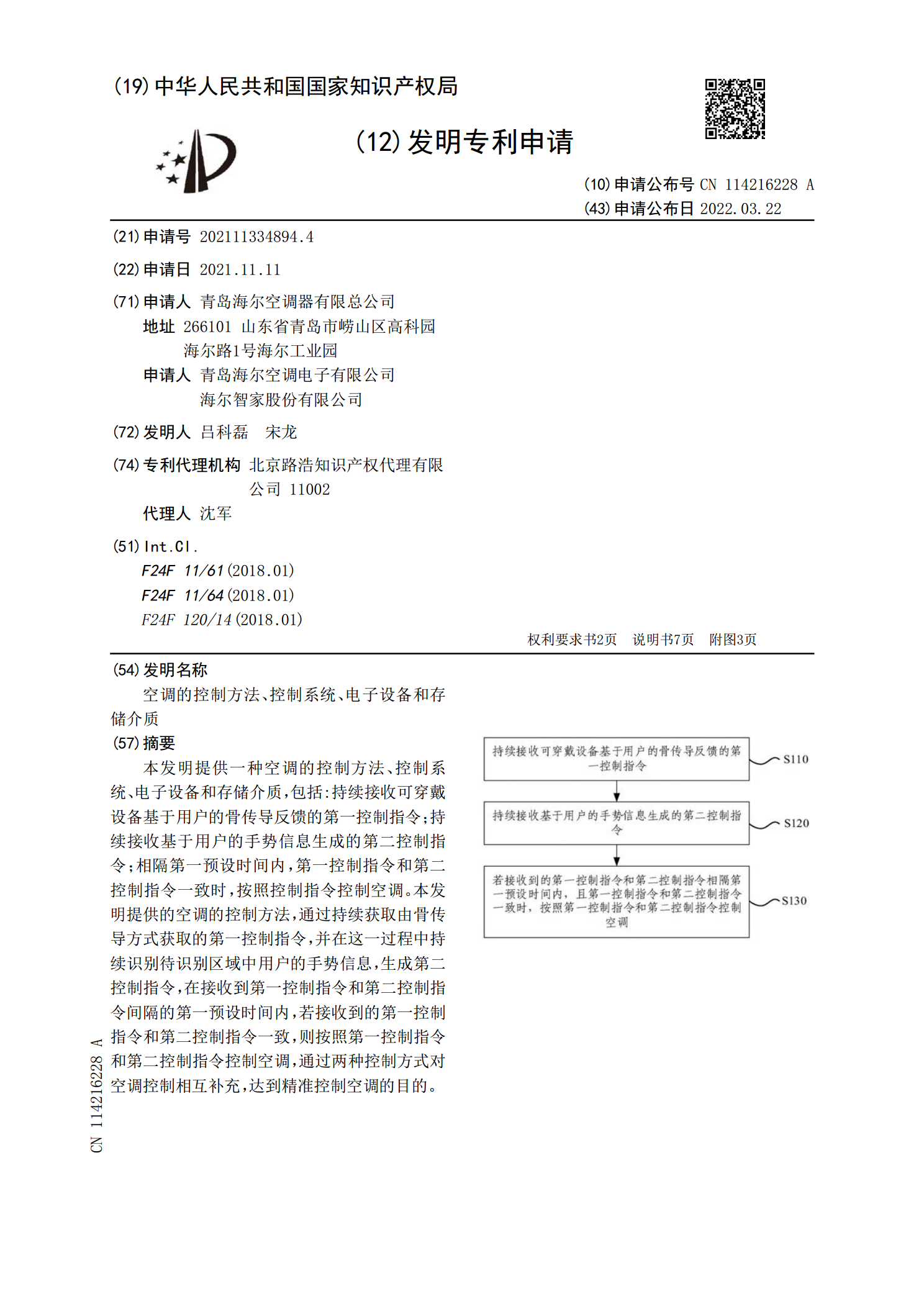
空调的控制方法、控制系统、电子设备和存储介质.pdf
本发明提供一种空调的控制方法、控制系统、电子设备和存储介质,包括:持续接收可穿戴设备基于用户的骨传导反馈的第一控制指令;持续接收基于用户的手势信息生成的第二控制指令;相隔第一预设时间内,第一控制指令和第二控制指令一致时,按照控制指令控制空调。本发明提供的空调的控制方法,通过持续获取由骨传导方式获取的第一控制指令,并在这一过程中持续识别待识别区域中用户的手势信息,生成第二控制指令,在接收到第一控制指令和第二控制指令间隔的第一预设时间内,若接收到的第一控制指令和第二控制指令一致,则按照第一控制指令和第二控制指
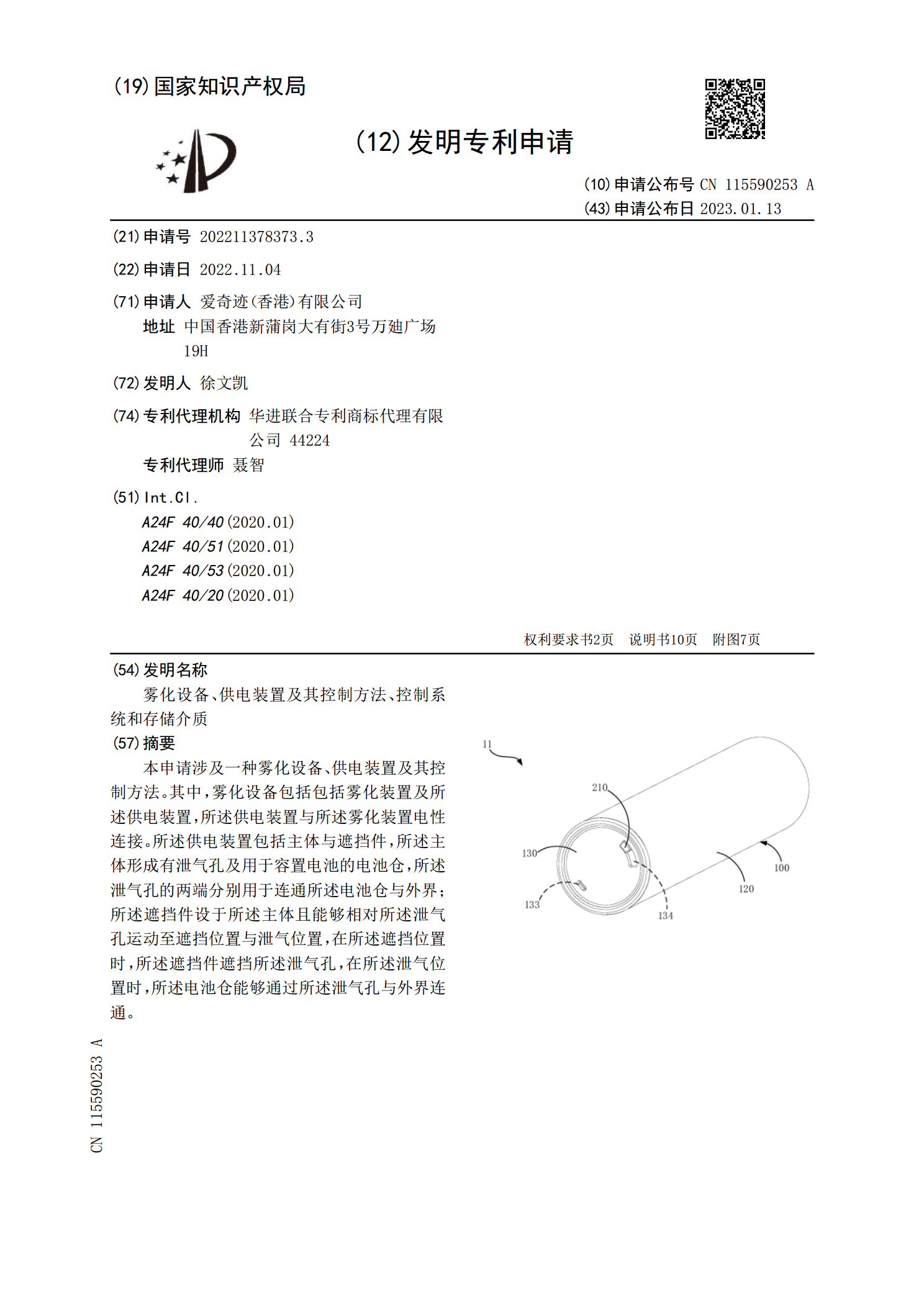
雾化设备、供电装置及其控制方法、控制系统和存储介质.pdf
本申请涉及一种雾化设备、供电装置及其控制方法。其中,雾化设备包括包括雾化装置及所述供电装置,所述供电装置与所述雾化装置电性连接。所述供电装置包括主体与遮挡件,所述主体形成有泄气孔及用于容置电池的电池仓,所述泄气孔的两端分别用于连通所述电池仓与外界;所述遮挡件设于所述主体且能够相对所述泄气孔运动至遮挡位置与泄气位置,在所述遮挡位置时,所述遮挡件遮挡所述泄气孔,在所述泄气位置时,所述电池仓能够通过所述泄气孔与外界连通。

功率模块控制系统、方法、电子设备和存储介质.pdf
本申请提供了功率模块控制系统、方法、电子设备和存储介质,该系统包括:主控制器、冗余控制器、信号选择模块和至少三个功率模块;所述主控制器、所述冗余控制器和所述至少三个功率模块分别与所述信号选择模块相连接;所述信号选择模块,用于在所述主控制器正常运行时,将来自所述主控制器的控制命令发送给所述功率模块,并在所述主控制器发生故障时,将来自所述冗余控制器的控制命令发送给所述功率模块;所述功率模块,用于根据接收到的控制命令,执行开关状态切换动作。本申请提供的功率模块控制系统具有较高的可靠性。