
一种永磁同步电机相电流重构盲区的解决方法.pdf

一吃****春晓

1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种永磁同步电机相电流重构盲区的解决方法.pdf
一种永磁同步电机相电流重构盲区的解决方法,该方法中在电流重构盲区时采用模型预测模块预测的电流替代重构电流进行反馈,具有好的控制效果。没有注入额外的电压矢量,系统的稳定性得到了保障,利用单电流传感器进行相电流的重构,降低了控制系统的成本,减小了控制系统的体积,避免了电流传感器之间的差异带来的测量误差。
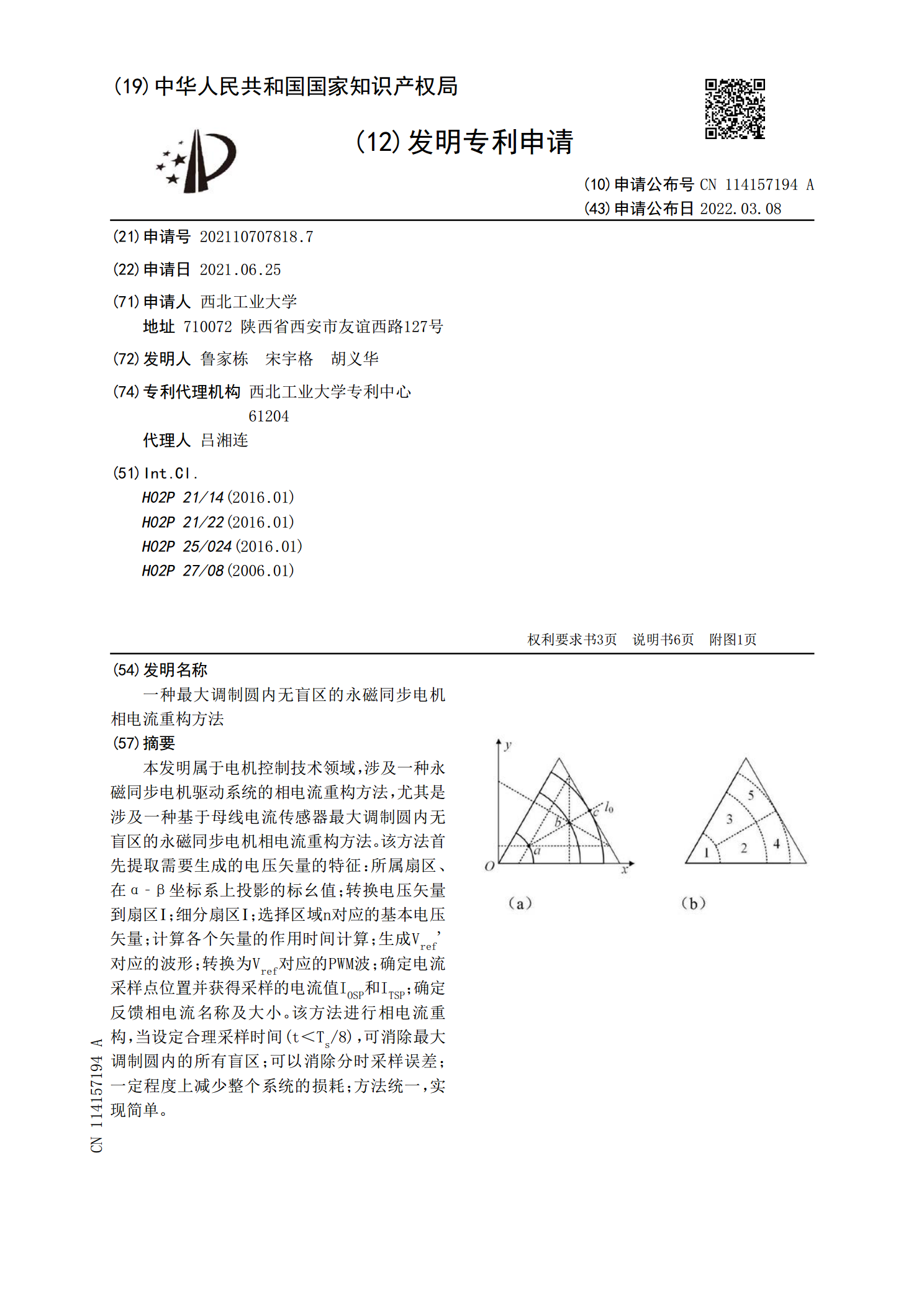
一种最大调制圆内无盲区的永磁同步电机相电流重构方法.pdf
本发明属于电机控制技术领域,涉及一种永磁同步电机驱动系统的相电流重构方法,尤其是涉及一种基于母线电流传感器最大调制圆内无盲区的永磁同步电机相电流重构方法。该方法首先提取需要生成的电压矢量的特征:所属扇区、在α‑β坐标系上投影的标幺值;转换电压矢量到扇区Ⅰ;细分扇区Ⅰ;选择区域n对应的基本电压矢量;计算各个矢量的作用时间计算;生成V

永磁同步电机相电流重构方法研究.docx
永磁同步电机相电流重构方法研究标题:永磁同步电机相电流重构方法研究摘要:永磁同步电机是一种常用的高性能电机,其相电流重构方法对于提高电机性能、提高功率因数和降低谐波有着重要意义。本文对永磁同步电机相电流重构方法进行了系统的研究,首先分析了相电流重构的意义和目标,然后综述了目前常用的相电流重构方法,并对其进行了比较和分析,最后给出了一种新的相电流重构方法,并进行了实验验证。实验结果表明,该方法能够有效地改善电机性能、提高功率因数和降低谐波。1.引言2.相电流重构的意义和目标3.相电流重构方法综述3.1直接轴
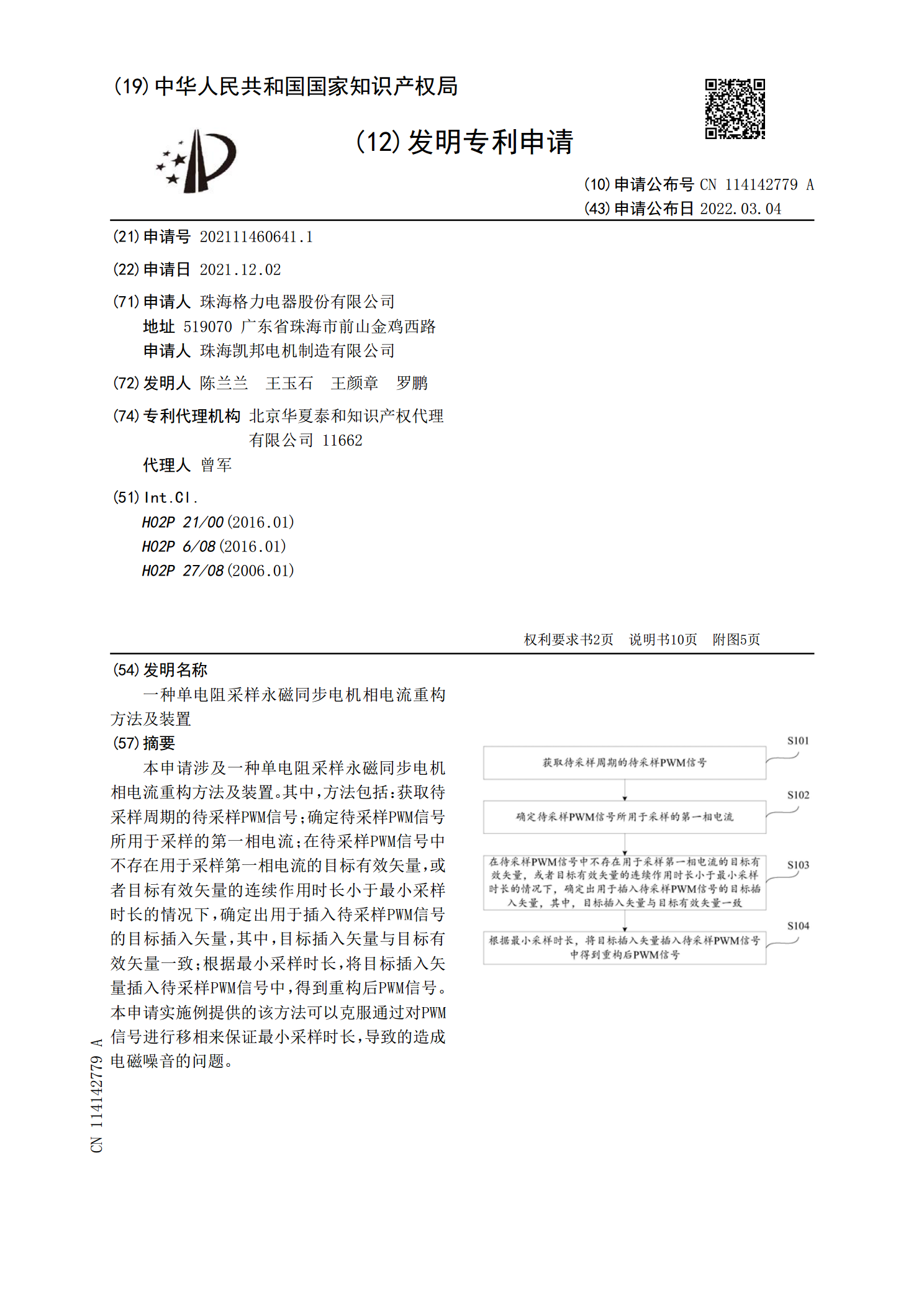
一种单电阻采样永磁同步电机相电流重构方法及装置.pdf
本申请涉及一种单电阻采样永磁同步电机相电流重构方法及装置。其中,方法包括:获取待采样周期的待采样PWM信号;确定待采样PWM信号所用于采样的第一相电流;在待采样PWM信号中不存在用于采样第一相电流的目标有效矢量,或者目标有效矢量的连续作用时长小于最小采样时长的情况下,确定出用于插入待采样PWM信号的目标插入矢量,其中,目标插入矢量与目标有效矢量一致;根据最小采样时长,将目标插入矢量插入待采样PWM信号中,得到重构后PWM信号。本申请实施例提供的该方法可以克服通过对PWM信号进行移相来保证最小采样时长,导致

一种开绕组永磁同步电机的相电流重构方法及控制系统.pdf
本发明公开了一种开绕组永磁同步电机的相电流重构方法及控制系统,属于电机领域。包括:以逆变器II各桥臂的上开关管驱动信号为触发源,采集各触发时刻母线电流值和逆变器II各桥臂的上开关管驱动信号高电平总数,根据母线电流值和高电平总数获取带零序分量的三相电流值;进行定子电流的磁链分量、转矩分量和零序分量控制;根据比例谐振控制器所需零序电压的正负情况,对逆变器I的桥臂驱动信号和逆变器II的桥臂驱动信号进行移相对齐;根据矢量作用时间实施盲区移相,输出120°调制的SVPWM双逆变器驱动信号并控制电机。本发明只需一个电