
一种集倾斜摄影测量与三维激光扫描的陡崖三维建模方法.pdf

星菱****23


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种集倾斜摄影测量与三维激光扫描的陡崖三维建模方法.pdf
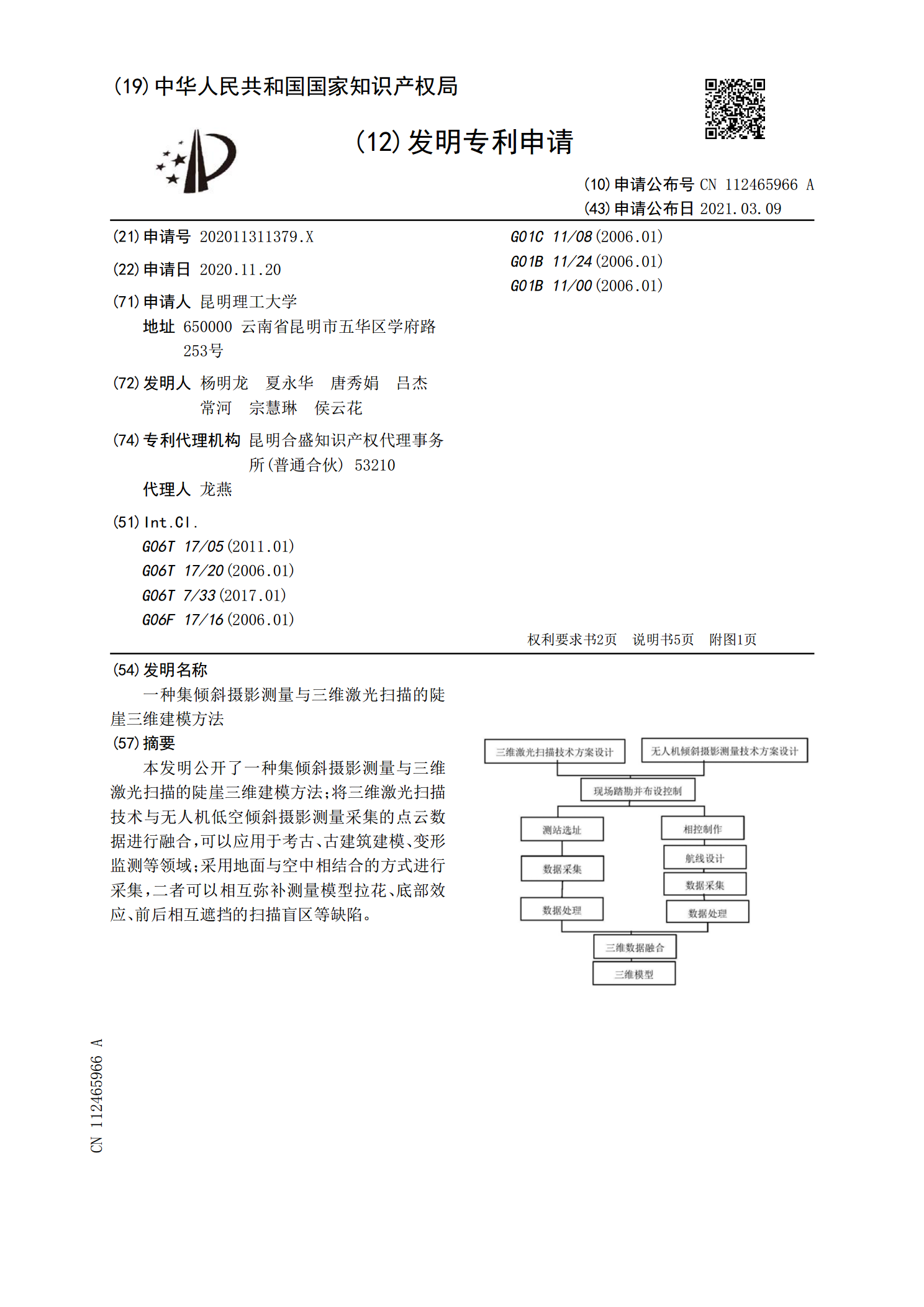
本发明公开了一种集倾斜摄影测量与三维激光扫描的陡崖三维建模方法;将三维激光扫描技术与无人机低空倾斜摄影测量采集的点云数据进行融合,可以应用于考古、古建筑建模、变形监测等领域;采用地面与空中相结合的方式进行采集,二者可以相互弥补测量模型拉花、底部效应、前后相互遮挡的扫描盲区等缺陷。
倾斜摄影测量与地面激光扫描技术的三维建模研究与应用.pdf
倾斜摄影测量与地面激光扫描技术的三维建模研究与应用摘要:科学技术的发展,我国的倾斜摄影测量与地面激光扫描技术有了很大进展。基于倾斜摄影测量技术建立的三维模型通常顶部和侧方结构建模效果较好,但在屋檐下部、近地面区域或有遮挡时建模效果欠佳。基于激光雷达扫描技术建立的三维模型往往由于视角盲区造成模型顶部构建不完整。本文首先分析倾斜摄影技术原理,其次探讨地面三维激光扫描,最后就倾斜摄影测量与地面激光扫描技术的三维建模具体实施过程进行研究,以供参考。关键词:倾斜摄影测量;三维激光扫描;三维点云引言倾斜摄影测量与传统
倾斜摄影测量三维建模及精度分析.pptx
,目录PartOnePartTwo倾斜摄影测量技术的定义倾斜摄影测量技术的发展历程倾斜摄影测量的应用领域PartThree三维建模的基本概念倾斜摄影测量三维建模的方法倾斜摄影测量三维建模的流程PartFour像控点布设对精度的影响影像质量对精度的影响空三解算对精度的影响三维建模算法对精度的影响PartFive精度分析的指标和评价方法像控点布设方案对精度的影响分析影像质量对精度的影响分析空三解算对精度的影响分析三维建模算法对精度的影响分析PartSix优化像控点布设方案提高影像质量改进空三解算算法优化三维建

基于倾斜摄影测量技术的城市三维建模方法研究.docx
基于倾斜摄影测量技术的城市三维建模方法研究随着城市建设的快速发展,三维建模技术在城市规划、景观设计、交通管理等领域得到了广泛应用。倾斜摄影测量技术作为一种高效、精确的三维建模方法,在城市三维建模中也逐渐得到了重视。本文旨在探讨基于倾斜摄影测量技术的城市三维建模方法,并分析其应用优势和存在的问题。一、倾斜摄影测量技术概述倾斜摄影测量技术是一种基于倾斜摄影的测量方法,其原理是通过倾斜摄影成像光束的几何关系,精确地计算出三维物体表面上每个点的坐标信息。与传统测量方法相比,倾斜摄影测量技术具有高效、精确、全面等优

一种基于倾斜摄影的三维建模方法.pdf
本发明公开了一种基于倾斜摄影的三维建模方法,包括以下步骤:A、通过第一次倾斜摄影获得的图像建立建模对象的轮廓模型;B、通过第二次倾斜摄影获得的图像建立建模对象的表面纹理模型;C、使用表面纹理模型与轮廓模型进行匹配,对无法匹配的部分进行标记;D、针对标记点进行第三次倾斜摄影,获取标记点的图像;E、使用第三次倾斜摄影获取的标记点图像分别与第一次倾斜摄影和第二次倾斜摄影获得的对应位置的图像进行对比,并根据对比偏差对轮廓模型和表面纹理模型进行修正;F、使用修正后的轮廓模型和表面纹理模型进行重新匹配,得到建模对象的