
一种具有实时监测功能的汽车盲区控制方法.pdf

景山****魔王

1/4
2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有实时监测功能的汽车盲区控制方法.pdf
本发明公开了一种具有实时监测功能的汽车盲区控制方法,具体按照以下步骤实施:步骤1、在汽车车身底部四周加装红外传感器,使红外传感器与汽车内雷达倒车系统连接;步骤2、将雷达倒车系统与控制器同时连接,并将报警装置与控制器页进行连接;步骤3、当有人或者动物位于车体附近而司机视线位于盲区时,红外传感器将检测到的人或者动物的信息传至控制器,控制器进行控制反应,以使司机最快避让。本发明解决了现有技术中存在的由于盲区而司机撞倒小动物或人的交通事故发生的问题。
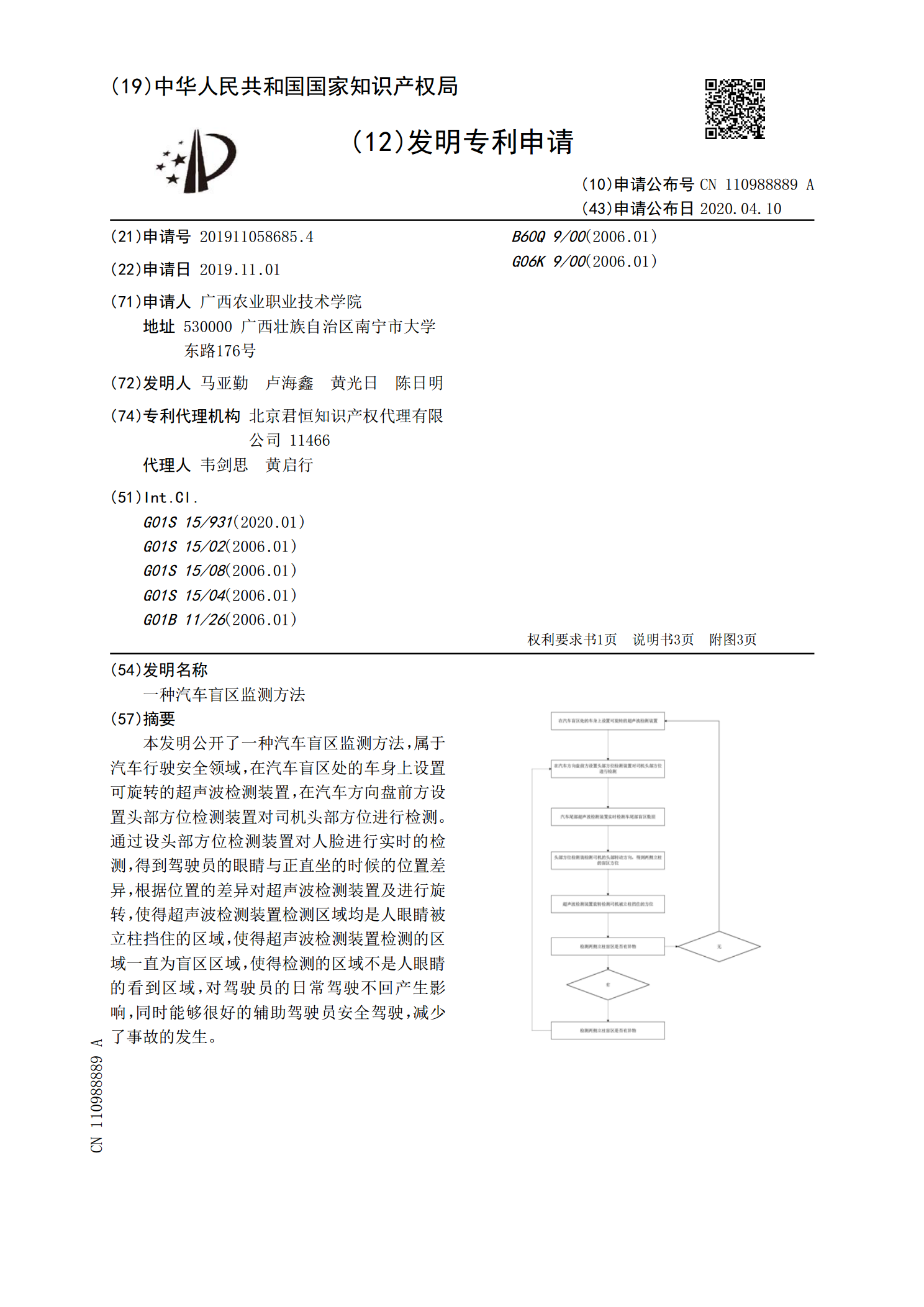
一种汽车盲区监测方法.pdf
本发明公开了一种汽车盲区监测方法,属于汽车行驶安全领域,在汽车盲区处的车身上设置可旋转的超声波检测装置,在汽车方向盘前方设置头部方位检测装置对司机头部方位进行检测。通过设头部方位检测装置对人脸进行实时的检测,得到驾驶员的眼睛与正直坐的时候的位置差异,根据位置的差异对超声波检测装置及进行旋转,使得超声波检测装置检测区域均是人眼睛被立柱挡住的区域,使得超声波检测装置检测的区域一直为盲区区域,使得检测的区域不是人眼睛的看到区域,对驾驶员的日常驾驶不回产生影响,同时能够很好的辅助驾驶员安全驾驶,减少了事故的发生。
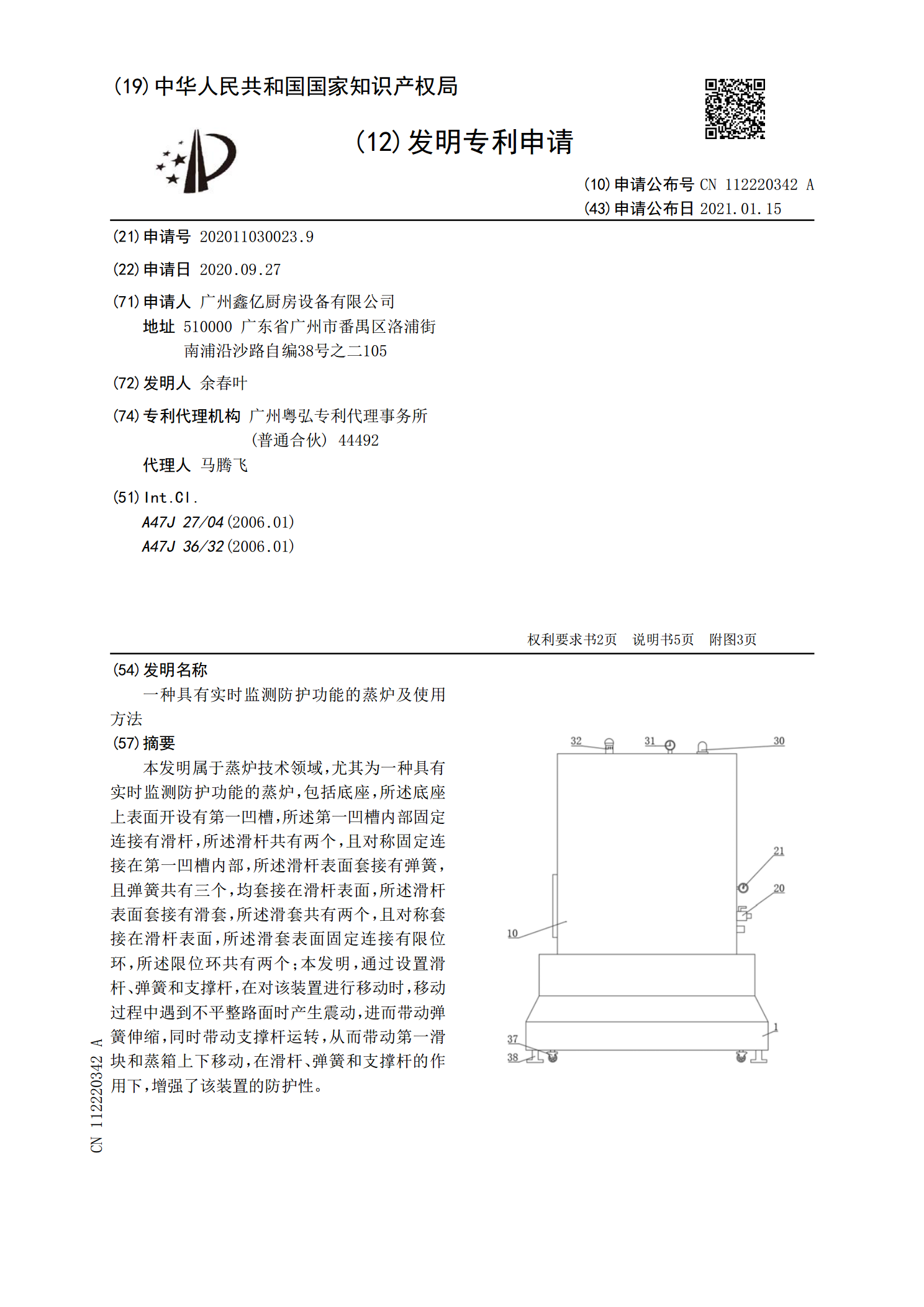
一种具有实时监测防护功能的蒸炉及使用方法.pdf
本发明属于蒸炉技术领域,尤其为一种具有实时监测防护功能的蒸炉,包括底座,所述底座上表面开设有第一凹槽,所述第一凹槽内部固定连接有滑杆,所述滑杆共有两个,且对称固定连接在第一凹槽内部,所述滑杆表面套接有弹簧,且弹簧共有三个,均套接在滑杆表面,所述滑杆表面套接有滑套,所述滑套共有两个,且对称套接在滑杆表面,所述滑套表面固定连接有限位环,所述限位环共有两个;本发明,通过设置滑杆、弹簧和支撑杆,在对该装置进行移动时,移动过程中遇到不平整路面时产生震动,进而带动弹簧伸缩,同时带动支撑杆运转,从而带动第一滑块和蒸箱上
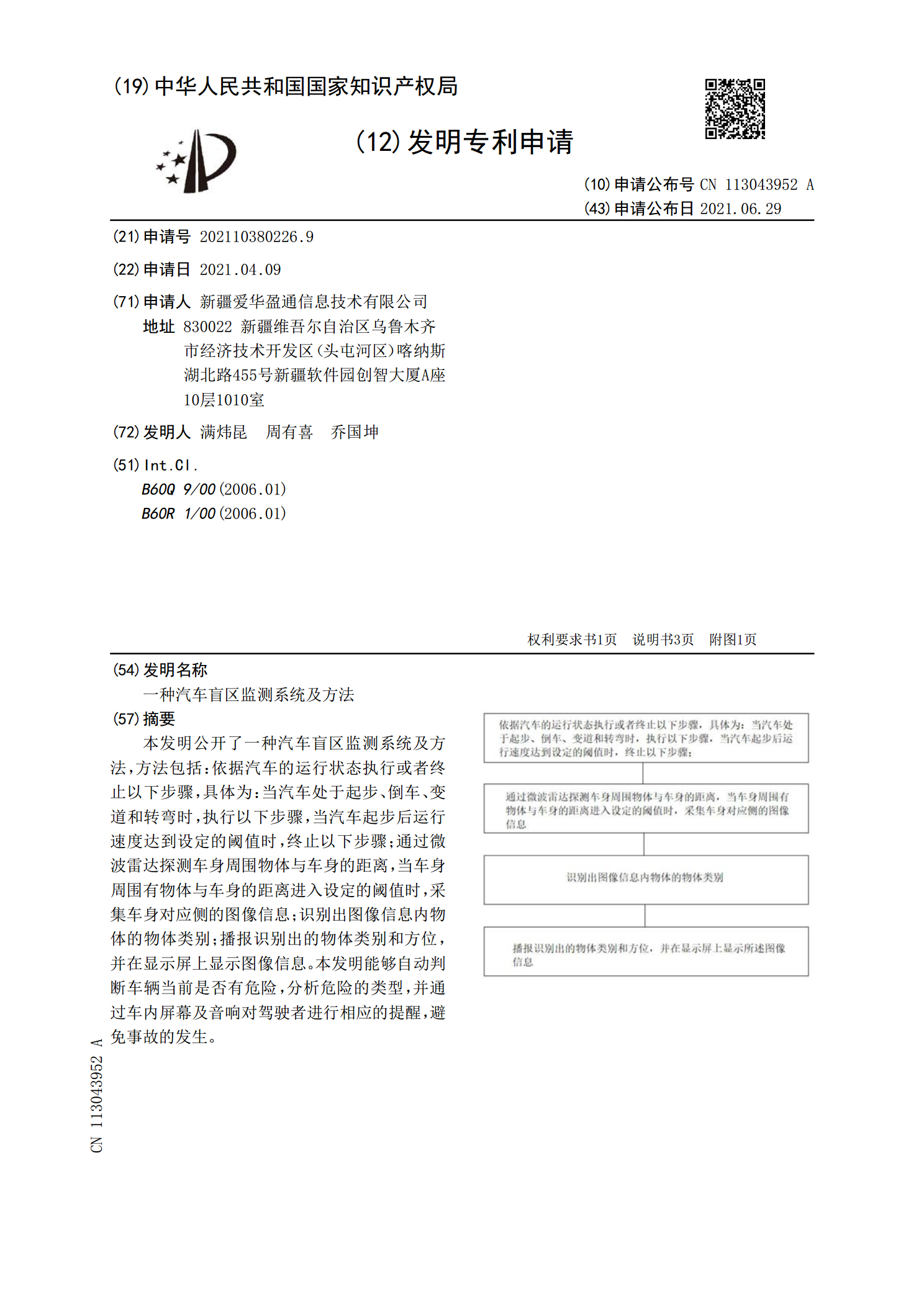
一种汽车盲区监测系统及方法.pdf
本发明公开了一种汽车盲区监测系统及方法,方法包括:依据汽车的运行状态执行或者终止以下步骤,具体为:当汽车处于起步、倒车、变道和转弯时,执行以下步骤,当汽车起步后运行速度达到设定的阈值时,终止以下步骤;通过微波雷达探测车身周围物体与车身的距离,当车身周围有物体与车身的距离进入设定的阈值时,采集车身对应侧的图像信息;识别出图像信息内物体的物体类别;播报识别出的物体类别和方位,并在显示屏上显示图像信息。本发明能够自动判断车辆当前是否有危险,分析危险的类型,并通过车内屏幕及音响对驾驶者进行相应的提醒,避免事故的发

具有盲区提示功能的汽车的外后视镜.pdf
本发明公开了一种具有盲区提示功能的汽车的外后视镜,包括左、右后视镜,所述左、右后视镜均包括壳体及嵌设于壳体上的镜体,所述镜体包括镜架及镜片,镜片通过镜架嵌设在壳体的开口处右后视镜还包括安装于其壳体内的右盲区提示灯总成,在右后视镜的镜片的右上角位置处设置有第一透明窗,右盲区提示灯总成位于所述右后视镜的壳体内与所述第一透明窗对应的位置处;左后视镜还包括安装于其壳体内的左盲区提示灯总成,在所述左后视镜的镜片的左上角位置处还设置有供左盲区提示灯总成的光源射出的第二透明窗,所述左盲区提示灯总成位于所述左后视镜的壳体