
一种基于时变混合信号盲分离的宽带DOA估计方法.pdf

一只****ng

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于时变混合信号盲分离的宽带DOA估计方法.pdf
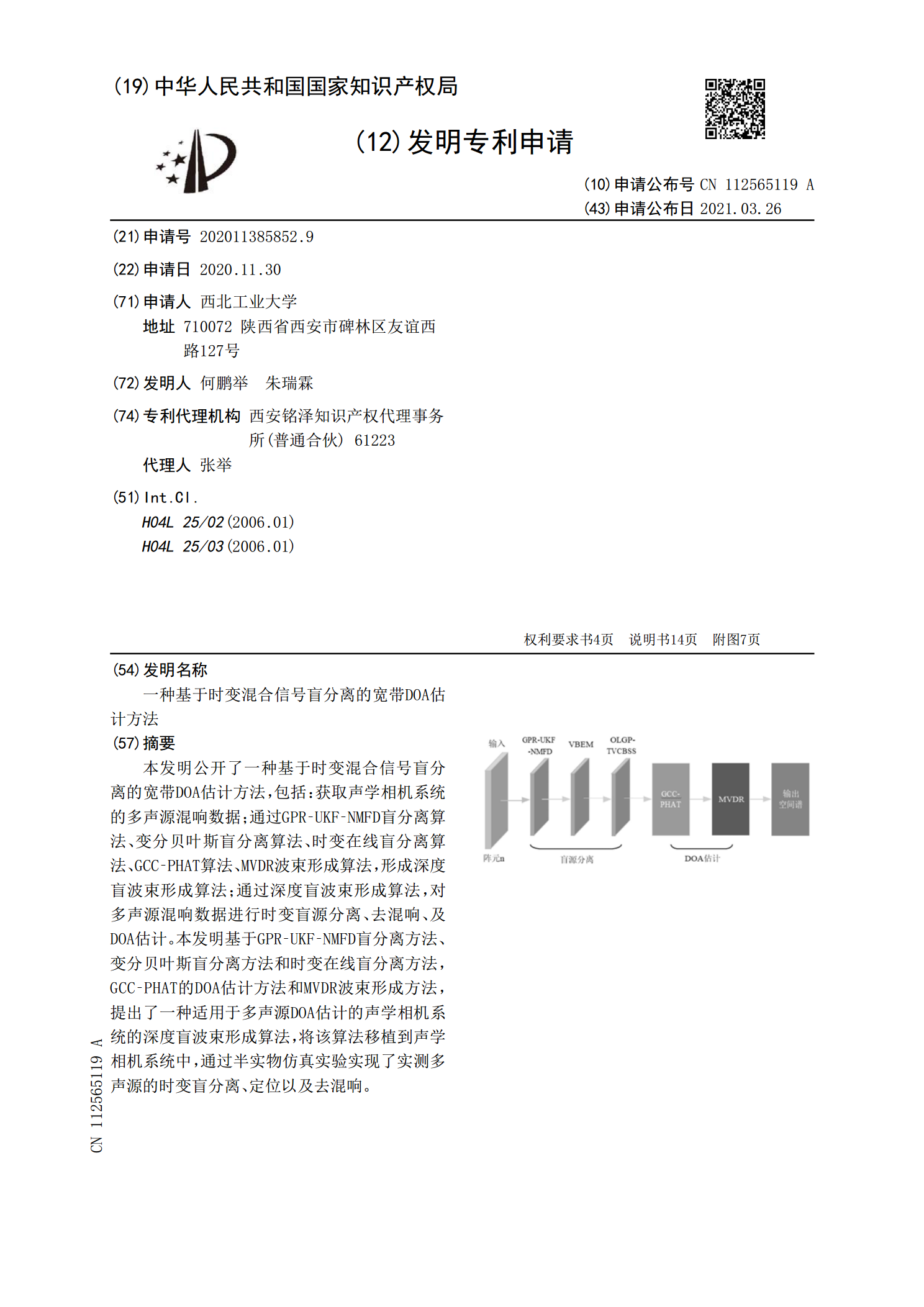
本发明公开了一种基于时变混合信号盲分离的宽带DOA估计方法,包括:获取声学相机系统的多声源混响数据;通过GPR‑UKF‑NMFD盲分离算法、变分贝叶斯盲分离算法、时变在线盲分离算法、GCC‑PHAT算法、MVDR波束形成算法,形成深度盲波束形成算法;通过深度盲波束形成算法,对多声源混响数据进行时变盲源分离、去混响、及DOA估计。本发明基于GPR‑UKF‑NMFD盲分离方法、变分贝叶斯盲分离方法和时变在线盲分离方法,GCC‑PHAT的DOA估计方法和MVDR波束形成方法,提出了一种适用于多声源DOA估计的声

基于时延的宽带LFM信号DOA估计算法.docx
基于时延的宽带LFM信号DOA估计算法基于时延的宽带LFM信号DOA估计算法摘要:随着无线通信技术的广泛应用,方向控制技术在无线通信领域中起着至关重要的作用。DOA(DirectionofArrival)估计是方向控制技术中的一项关键任务,它的目标是确定目标信号来自于空间中的哪个方向。本文提出了一种基于时延的宽带LFM(LinearFrequencyModulated)信号DOA估计算法,通过对接收信号的时延信息进行分析和处理,实现了在复杂环境中高精度的DOA估计。引言:DOA估计是无线通信系统中的关键技
基于复数盲源分离的船舶DOA方位估计方法.pdf
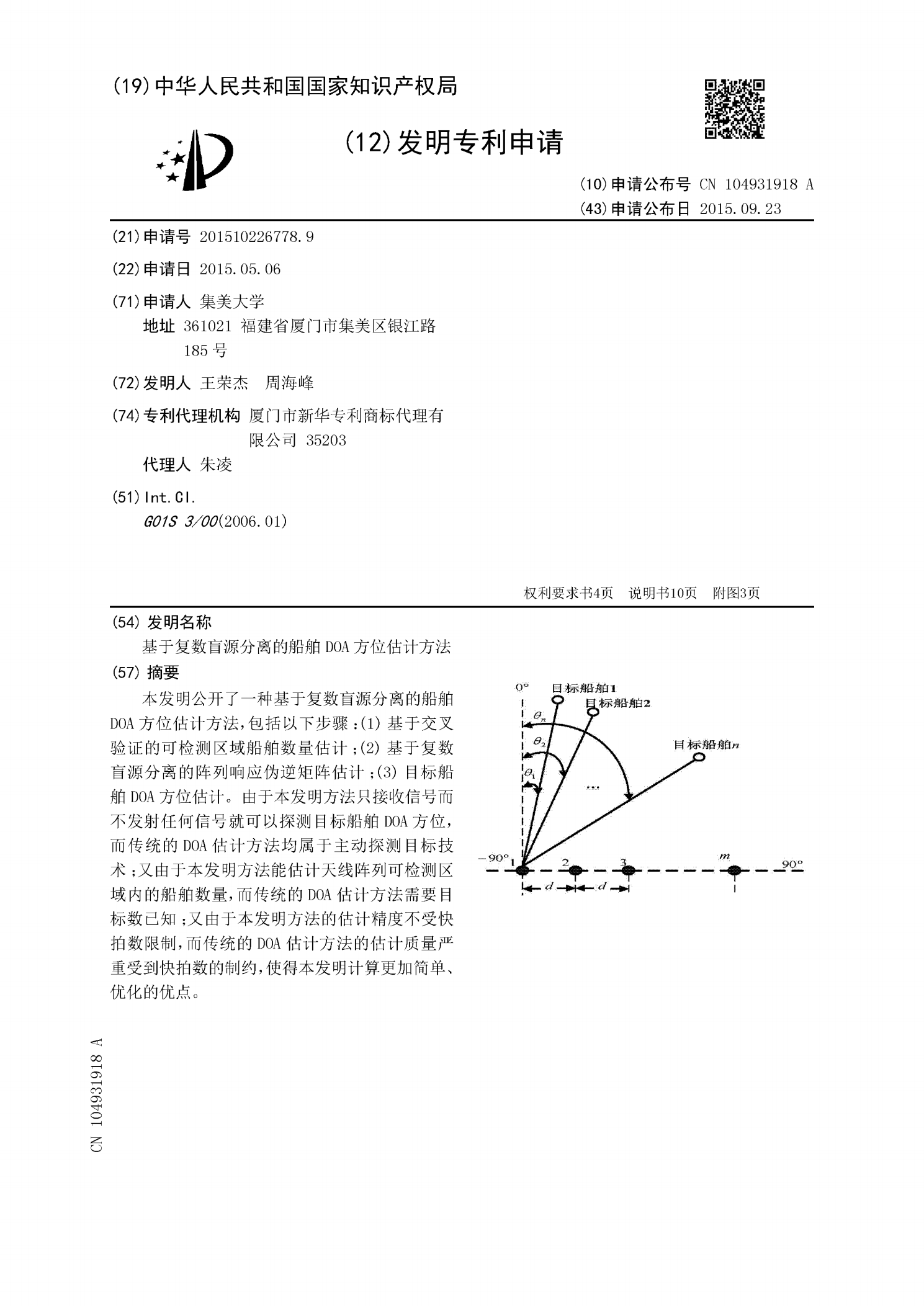
本发明公开了一种基于复数盲源分离的船舶DOA方位估计方法,包括以下步骤:(1)基于交叉验证的可检测区域船舶数量估计;(2)基于复数盲源分离的阵列响应伪逆矩阵估计;(3)目标船舶DOA方位估计。由于本发明方法只接收信号而不发射任何信号就可以探测目标船舶DOA方位,而传统的DOA估计方法均属于主动探测目标技术;又由于本发明方法能估计天线阵列可检测区域内的船舶数量,而传统的DOA估计方法需要目标数已知;又由于本发明方法的估计精度不受快拍数限制,而传统的DOA估计方法的估计质量严重受到快拍数的制约,使得本发明计算

基于子空间方法的宽带信号DOA估计的中期报告.docx
基于子空间方法的宽带信号DOA估计的中期报告一、研究目标本研究的目标是基于子空间方法实现对宽带信号的方向性参数估计(DOA估计),并评估其性能。二、研究现状在信号处理领域,DOA估计是一个长期研究的热点问题。传统的方法包括MUSIC、ESPRIT、ROOT-MUSIC等,这些方法具有良好的性能,但缺点是只能处理窄带信号,对于宽带信号的DOA估计就显得力不从心。近年来,基于子空间方法的宽带信号DOA估计逐渐受到研究者的关注。该方法的基本思想是:将接收到的宽带信号通过信号分解来求出信号子空间和噪声子空间,进而

一种宽带非相关信号DOA估计的新方法.docx
一种宽带非相关信号DOA估计的新方法一种宽带非相关信号DOA估计的新方法导言:随着通信技术的不断发展,无线通信在我们的生活中发挥着越来越重要的作用。高速数据传输、高清视频传输等宽带通信应用也越来越受到关注和重视,其中的信号参数估计问题就是一个非常重要的研究方向之一。其中,非相关信号DOA(方向角)估计是研究的热点之一。在各种应用中,如无线通信、雷达、医学图像处理等领域都要用到非相关信号DOA估计。如何在宽带信号环境下精确地估计到其方向角,一直是我们关注和研究的问题。主体:1、研究背景:当前,DOA估计方法