
一种风力发电机组叶片净空监测系统及方法.pdf

明轩****la

1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种风力发电机组叶片净空监测系统及方法.pdf
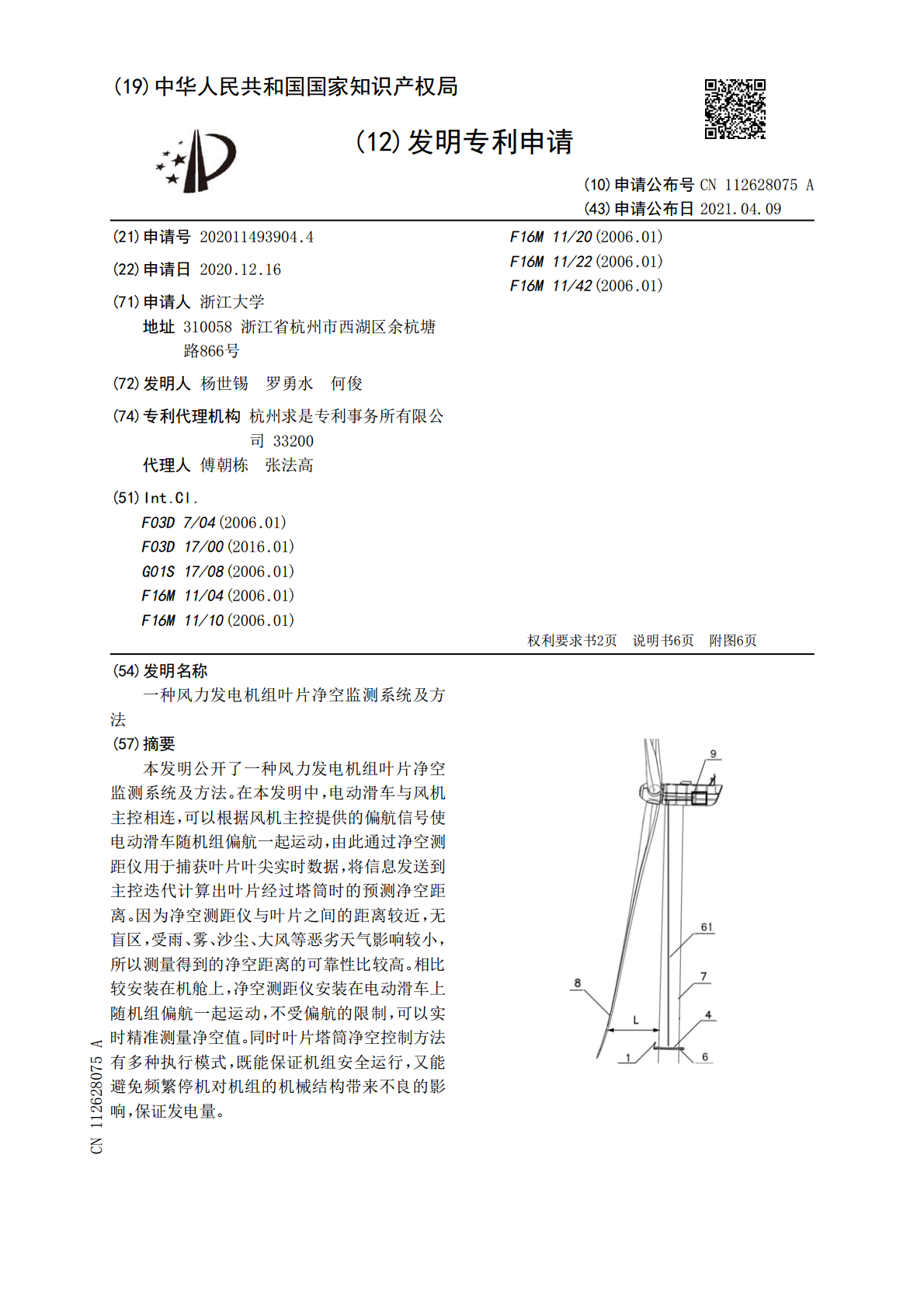
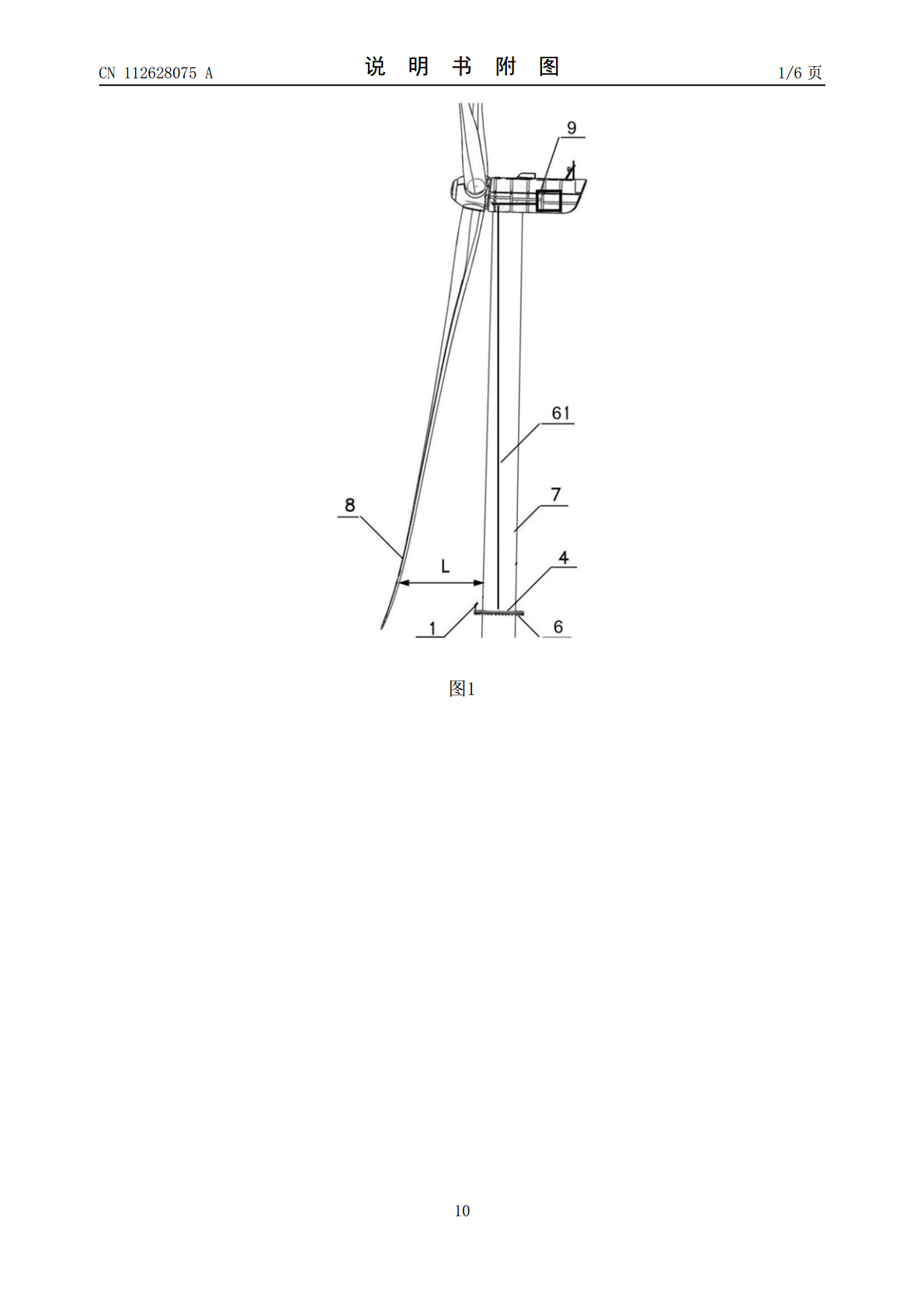
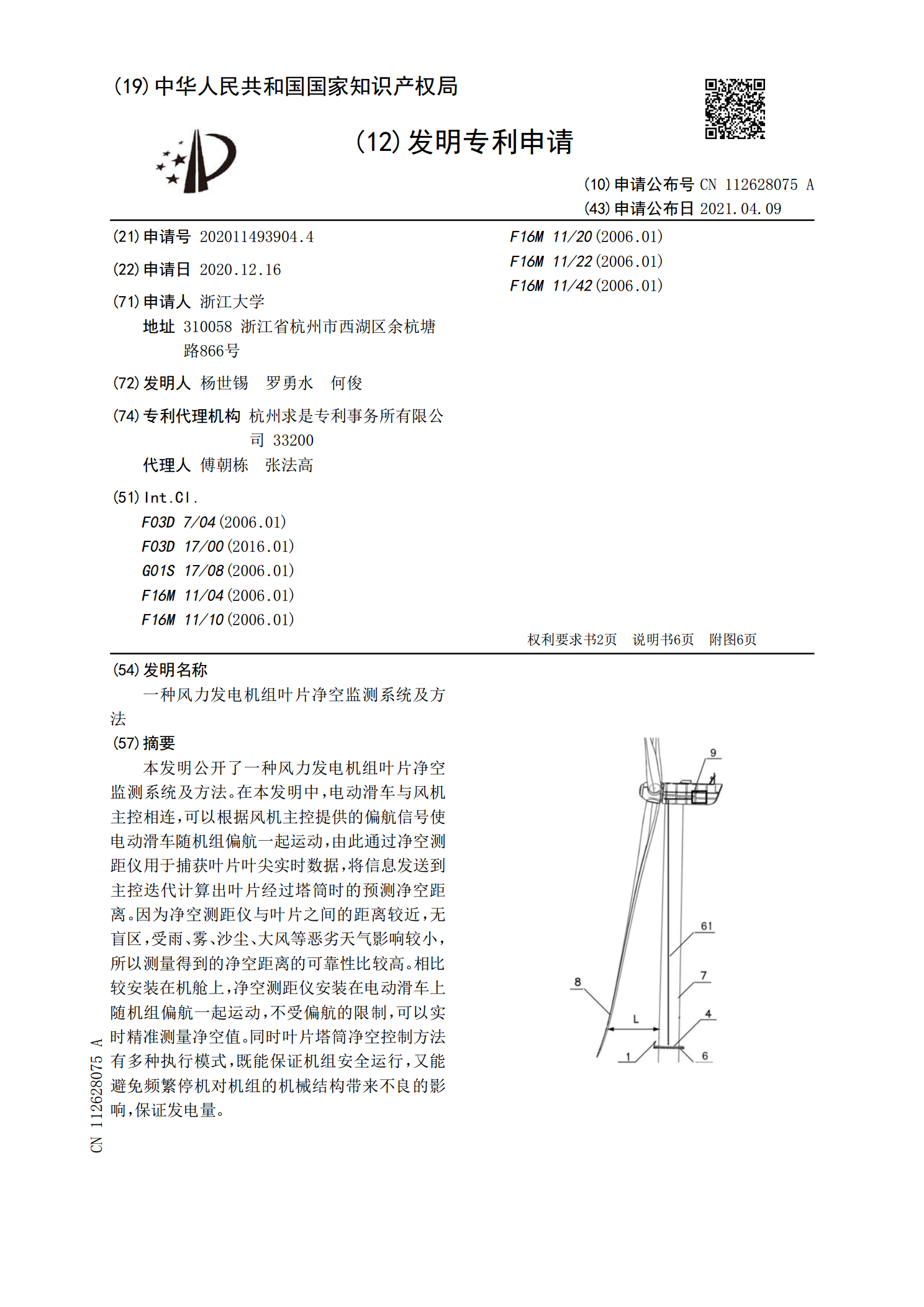
本发明公开了一种风力发电机组叶片净空监测系统及方法。在本发明中,电动滑车与风机主控相连,可以根据风机主控提供的偏航信号使电动滑车随机组偏航一起运动,由此通过净空测距仪用于捕获叶片叶尖实时数据,将信息发送到主控迭代计算出叶片经过塔筒时的预测净空距离。因为净空测距仪与叶片之间的距离较近,无盲区,受雨、雾、沙尘、大风等恶劣天气影响较小,所以测量得到的净空距离的可靠性比较高。相比较安装在机舱上,净空测距仪安装在电动滑车上随机组偏航一起运动,不受偏航的限制,可以实时精准测量净空值。同时叶片塔筒净空控制方法有多种执行
风力发电机组叶片的监测方法和监测系统.pdf
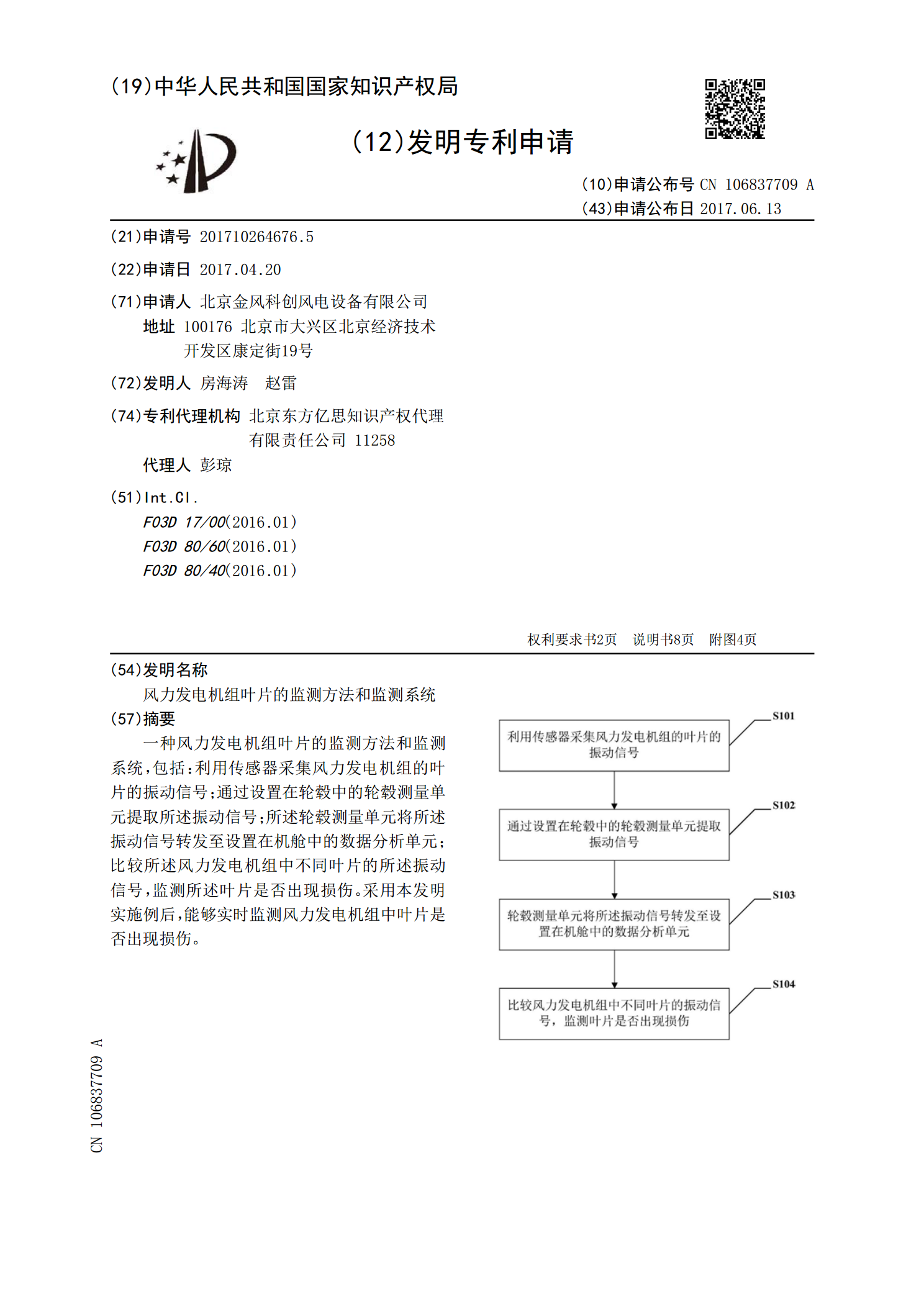
一种风力发电机组叶片的监测方法和监测系统,包括:利用传感器采集风力发电机组的叶片的振动信号;通过设置在轮毂中的轮毂测量单元提取所述振动信号;所述轮毂测量单元将所述振动信号转发至设置在机舱中的数据分析单元;比较所述风力发电机组中不同叶片的所述振动信号,监测所述叶片是否出现损伤。采用本发明实施例后,能够实时监测风力发电机组中叶片是否出现损伤。
一种风力发电机组塔架净空估计方法及系统.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN114117664A(43)申请公布日2022.03.01(21)申请号CN202111339039.2(22)申请日2021.11.12(71)申请人山东中车风电有限公司地址250000山东省济南市高新区世纪大道3666号(72)发明人牛成刘茸茸关中杰陈孝旭刘翠翠刘南南(74)专利代理机构37221济南圣达知识产权代理有限公司代理人武博(51)Int.CIG06F30/17(20200101)F03D17/00(201601

风力发电机组叶片气动平衡监测调整系统及监测调整方法.pdf
本发明提供了一种风力发电机组叶片气动平衡监测调整系统及监测调整方法。其中,风力发电机组叶片气动平衡监测调整系统包括主控制器、传感器组;传感器组用于实时监测风力发电机的结构部件的载荷数据,并在不同叶片通过在预设风轮方位角度瞬间时,检测到不同叶片处于预设风轮方位角度时的结构部件的载荷数据;主控制器用于根据结构部件的载荷数据,来判断不同叶片的气动是否平衡;并且在当前叶片气动不平衡时,计算得到当前叶片的不平衡度;根据不平衡度对当前叶片进行独立变桨动作。上述监测调整方式,可利用结构载荷对于叶片的气动平衡进行监测,同
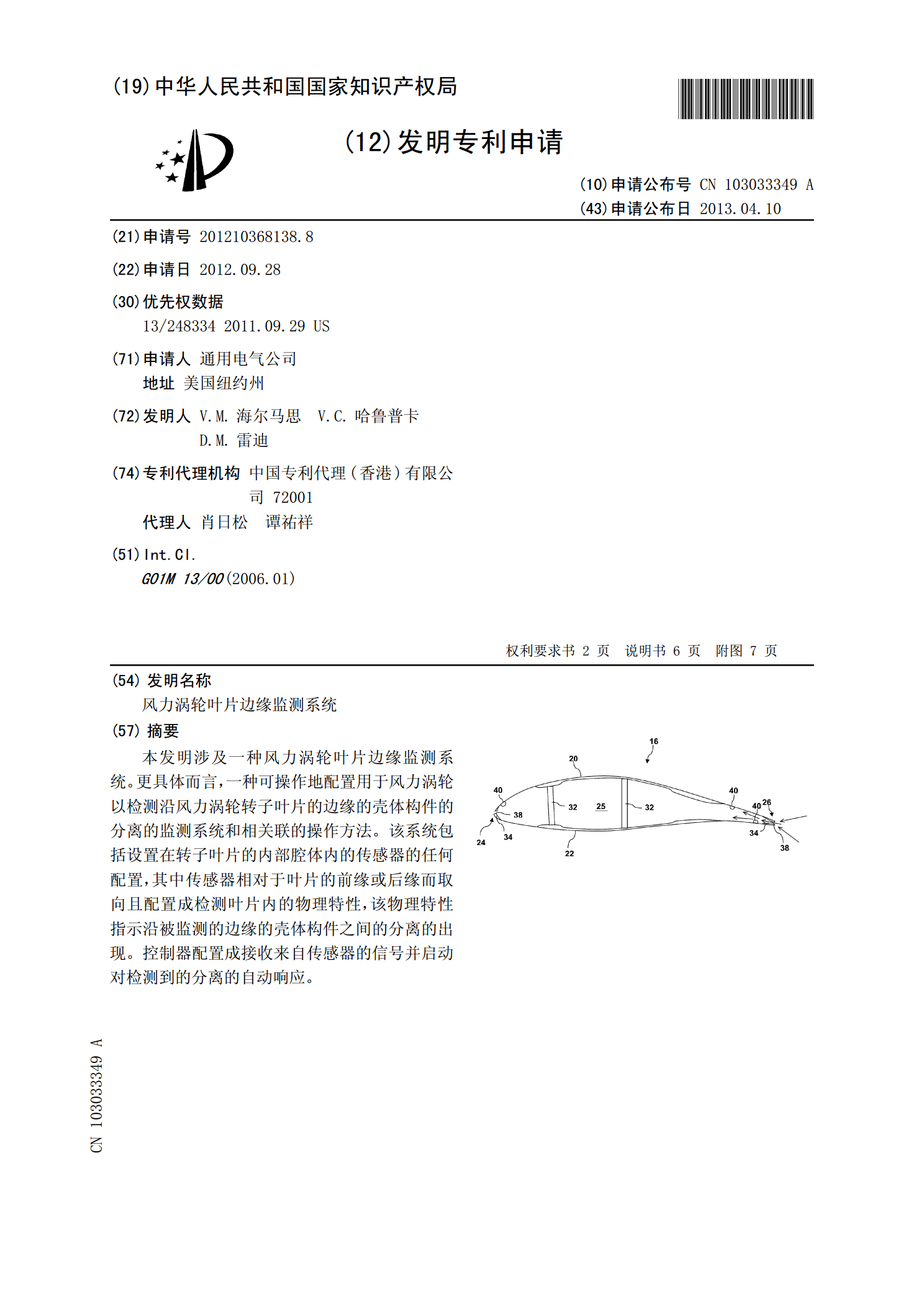
风力涡轮叶片边缘监测系统.pdf
本发明涉及一种风力涡轮叶片边缘监测系统。更具体而言,一种可操作地配置用于风力涡轮以检测沿风力涡轮转子叶片的边缘的壳体构件的分离的监测系统和相关联的操作方法。该系统包括设置在转子叶片的内部腔体内的传感器的任何配置,其中传感器相对于叶片的前缘或后缘而取向且配置成检测叶片内的物理特性,该物理特性指示沿被监测的边缘的壳体构件之间的分离的出现。控制器配置成接收来自传感器的信号并启动对检测到的分离的自动响应。