
一种基于盲NCS的宽波束SAR自聚焦方法.pdf

景山****魔王

1/10
2/10

3/10

4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于盲NCS的宽波束SAR自聚焦方法.pdf
本发明公开了一种基于盲NCS的宽波束SAR自聚焦方法,包括获取雷达原始数据;通过雷达原始数据构建运动误差模型,并对运动误差进行分类;进行误差补偿和距离校正对运动误差模型进行处理,得到处理后信号模型;校正方位空变的运动误差;采用多参数优化问题分解为若干一维参数优化问题的方法,进行图像质量评估,并选出最优的参数补偿误差相位,进行自聚焦处理。本发明将宽波束下方位空变误差建模为了三次多项式,保障了模型精度;同时补偿了非空变误差和距离空变误差,引入NCS因子并将自聚焦处理建模为一个多参数的最优化问题,对方位空变误差

一种基于SAC算法的星载SAR自聚焦方法.pdf
本发明公开了一种基于SAC算法的星载SAR自聚焦系统,该系统采用FPGA完成,同时通过外界设备接收原始回波和卫星参数;FPGA中包括:位置计算模块计算获得每条方位向数据的位置信息,并经过SDRAM存入到DPRAM中;DPRAM获取读取有效频谱数据,并输入至FFT?IP核中进行IFFT,结果存储于SDRAM中;频移相关模块依据IFFT结果估计多普勒频率值存入SDRAM中;聚焦模块划分子块并计算各子块的多普勒频率估计值及其位置存入DPRAM中;剔值模块对DPRAM中估计值进行第一次剔值;均值模块对DPRAM中

基于FPGA的多模式SAR自聚焦快速处理方法及系统.pdf
本发明公开了一种基于FPGA的多模式SAR自聚焦快速处理方法及系统,属于雷达成像与数字信号处理领域,主要解决常规一维自聚焦相位误差估计精度不高、成像分辨率低、多子孔径自聚焦算法电路结构设计复杂以及算法处理速度慢的问题,主要包括对散焦时域数据进行两维快速傅里叶逆变换,对散焦时域数据进行方位相位误差估计,采用Sinc插值算法对方位相位误差插值映射成两维相位误差,将两维相位误差与逆变结果复乘以实现两维补偿。本发明电路结构简单,算法处理速度快,能够有效补偿残留的距离徙动,使两维散焦情况得到较大的改善,并且还适用于
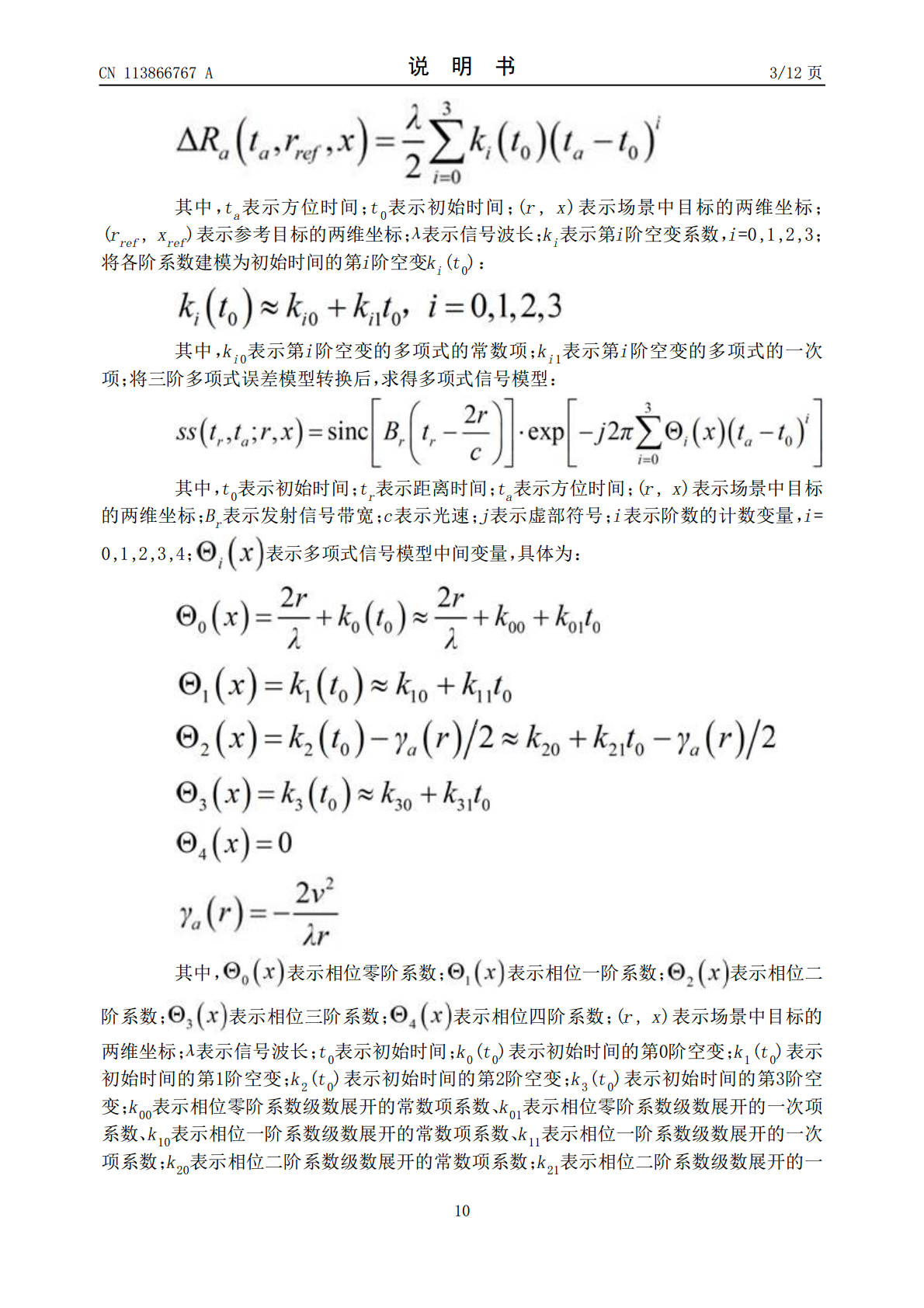
一种弹载SAR成像自聚焦方法.pdf
本发明属于自动聚焦技术领域,尤其是涉及一种弹载SAR成像自聚焦方法,包括基于卡尔丹方程的二维频谱计算,做二维FFT得到二维频谱;用场景中心距离处的频谱对信号进行补偿并做距离脉冲压缩;做距离IFFT将信号变换到距离‑多普勒域,补偿随距离空变的相位差;对信号做方位向IFFT,得到聚焦后的SAR图像。本发明从获得高精度二维频谱的角度出发,提出了一种新的弹载SAR成像思路,首先,对斜距进行合理近似,在保证成像质量的条件下降低利用POSP求解驻相点时的方程阶数,再通过卡尔丹方程解得驻相点的精确解,进而得到信号二维频
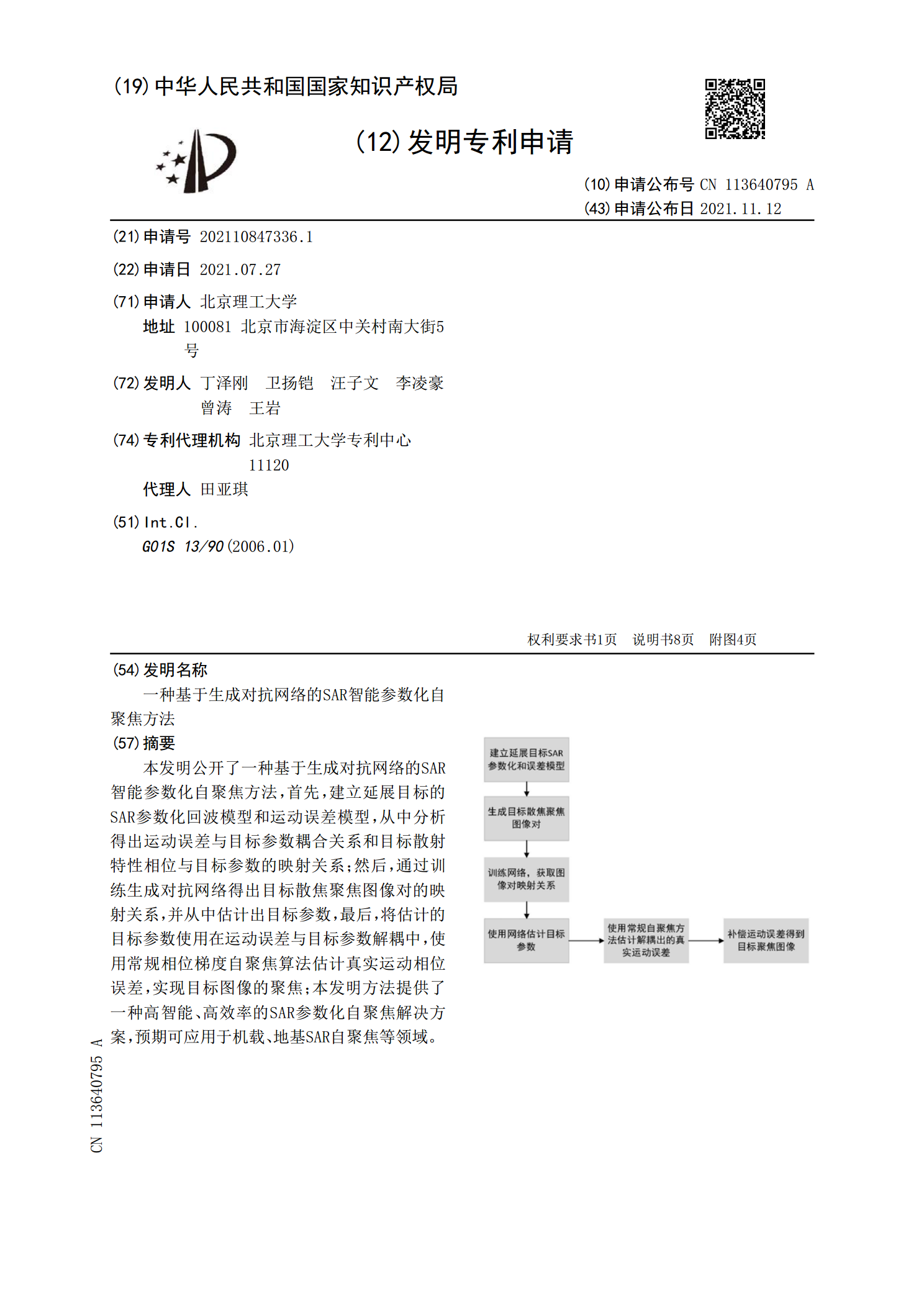
一种基于生成对抗网络的SAR智能参数化自聚焦方法.pdf
本发明公开了一种基于生成对抗网络的SAR智能参数化自聚焦方法,首先,建立延展目标的SAR参数化回波模型和运动误差模型,从中分析得出运动误差与目标参数耦合关系和目标散射特性相位与目标参数的映射关系;然后,通过训练生成对抗网络得出目标散焦聚焦图像对的映射关系,并从中估计出目标参数,最后,将估计的目标参数使用在运动误差与目标参数解耦中,使用常规相位梯度自聚焦算法估计真实运动相位误差,实现目标图像的聚焦;本发明方法提供了一种高智能、高效率的SAR参数化自聚焦解决方案,预期可应用于机载、地基SAR自聚焦等领域。