
一种永磁同步电机控制方法.pdf

醉香****mm


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种永磁同步电机控制方法.pdf
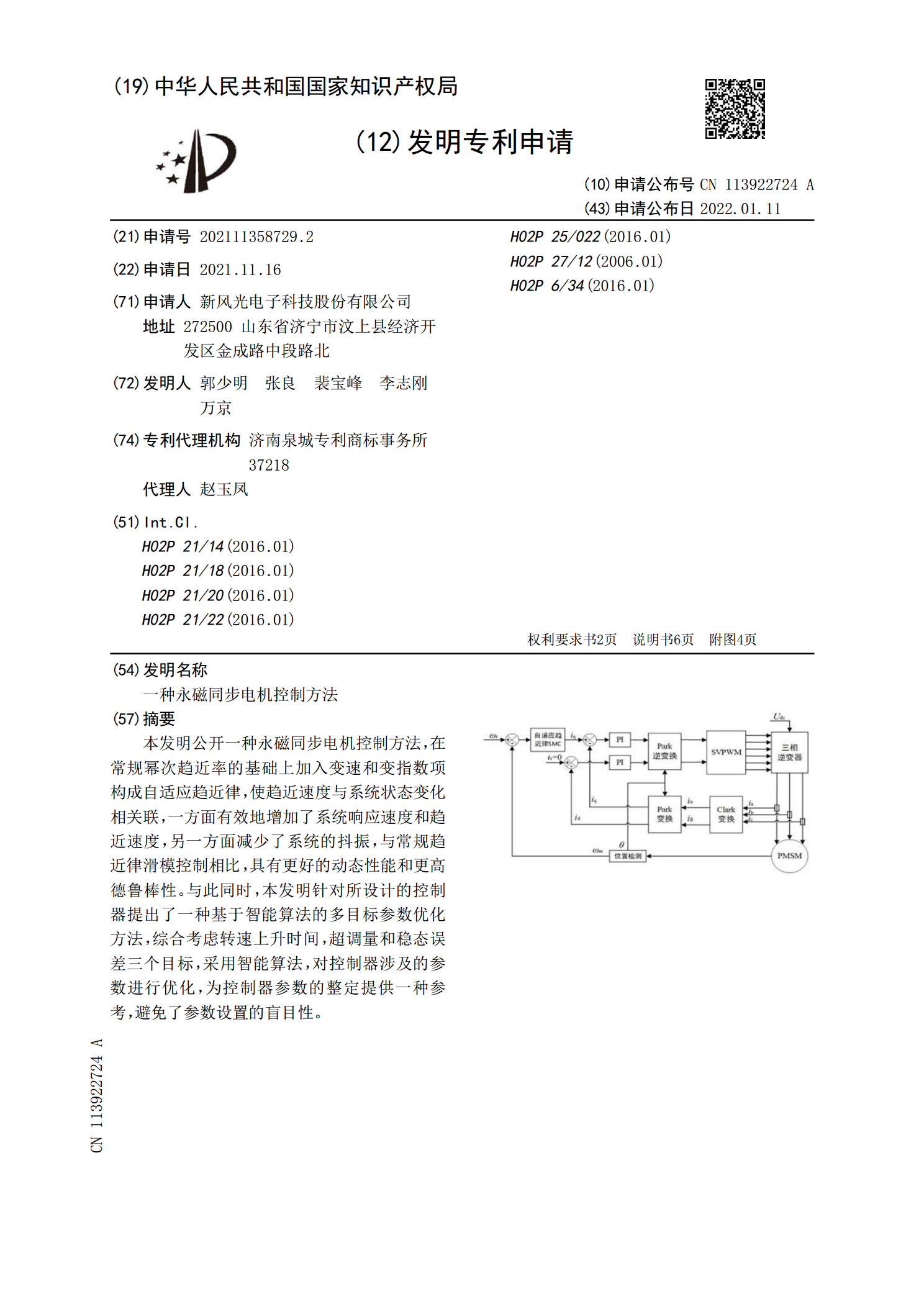
本发明公开一种永磁同步电机控制方法,在常规幂次趋近率的基础上加入变速和变指数项构成自适应趋近律,使趋近速度与系统状态变化相关联,一方面有效地增加了系统响应速度和趋近速度,另一方面减少了系统的抖振,与常规趋近律滑模控制相比,具有更好的动态性能和更高德鲁棒性。与此同时,本发明针对所设计的控制器提出了一种基于智能算法的多目标参数优化方法,综合考虑转速上升时间,超调量和稳态误差三个目标,采用智能算法,对控制器涉及的参数进行优化,为控制器参数的整定提供一种参考,避免了参数设置的盲目性。

一种永磁同步电机If控制的改进方法.docx
一种永磁同步电机If控制的改进方法摘要:永磁同步电机作为一种高效率、高功率密度、响应速度快的电机,在工业中得到越来越广泛的应用。如何控制永磁同步电机至关重要。本文提出一种改进的If控制方法,该方法基于传统的If控制方法,并加入积分环节,通过对比传统If控制和改进的If控制方法的实验结果,证明了改进的If控制方法在降低永磁同步电机的误差和噪声方面具有相当的优势。引言:永磁同步电机的高效率和响应速度,使其在工业中应用日益广泛。永磁同步电机的控制方法有很多种,其中最常用的为If控制。传统的If控制方法在控制永磁

一种永磁直线同步电机控制装置及方法.pdf
一种永磁直线同步电机控制装置和方法。本发明结合反演算法与动态面滑模方法设计永磁直线同步电机反演动态面滑模控制器,保留了反演法在实现不确定非线性系统鲁棒控制方面的优越性,又解决了反演滑模算法需要被控对象的精确建模信息的缺点,同时采用动态面的控制方法,利用一阶积分滤波器来计算虚拟控制的倒数,消除积分项的膨胀。该控制方法的设计包括主电路、控制电路和控制对象三部分;主电路包括整流滤波单元和IPM逆变单元;控制电路包括DSP、速度检测电路、电流检测电路、光耦隔离电路、驱动电路及故障检测;控制对象为三相永磁直线同步电

一种永磁同步电机弱磁控制方法.pdf
本发明涉及一种永磁同步电机弱磁控制方法,属于电机控制技术领域。本发明提出只采用直轴电流调节器,交轴电压通过分区直接给定的方法;将最大转矩电流比控制曲线线性化为一条直线,并根据该直线的斜率结合电压矢量幅值与逆变器直流端输出电压的最大值,判断弱磁控制和最大转矩电流比控制切换模式;根据构建出交轴电压和电流之间的线性数学关系,并结合直轴电流的大小判断弱磁运行区域,分区给定交轴电压,使电机交轴电压指令值能根据电机转速的变化实时调节。本发明提高了电机控制模式切换时的响应速度,使电机稳定工作在最优工作点,保证了电机运行
永磁同步电机转矩控制方法.pdf
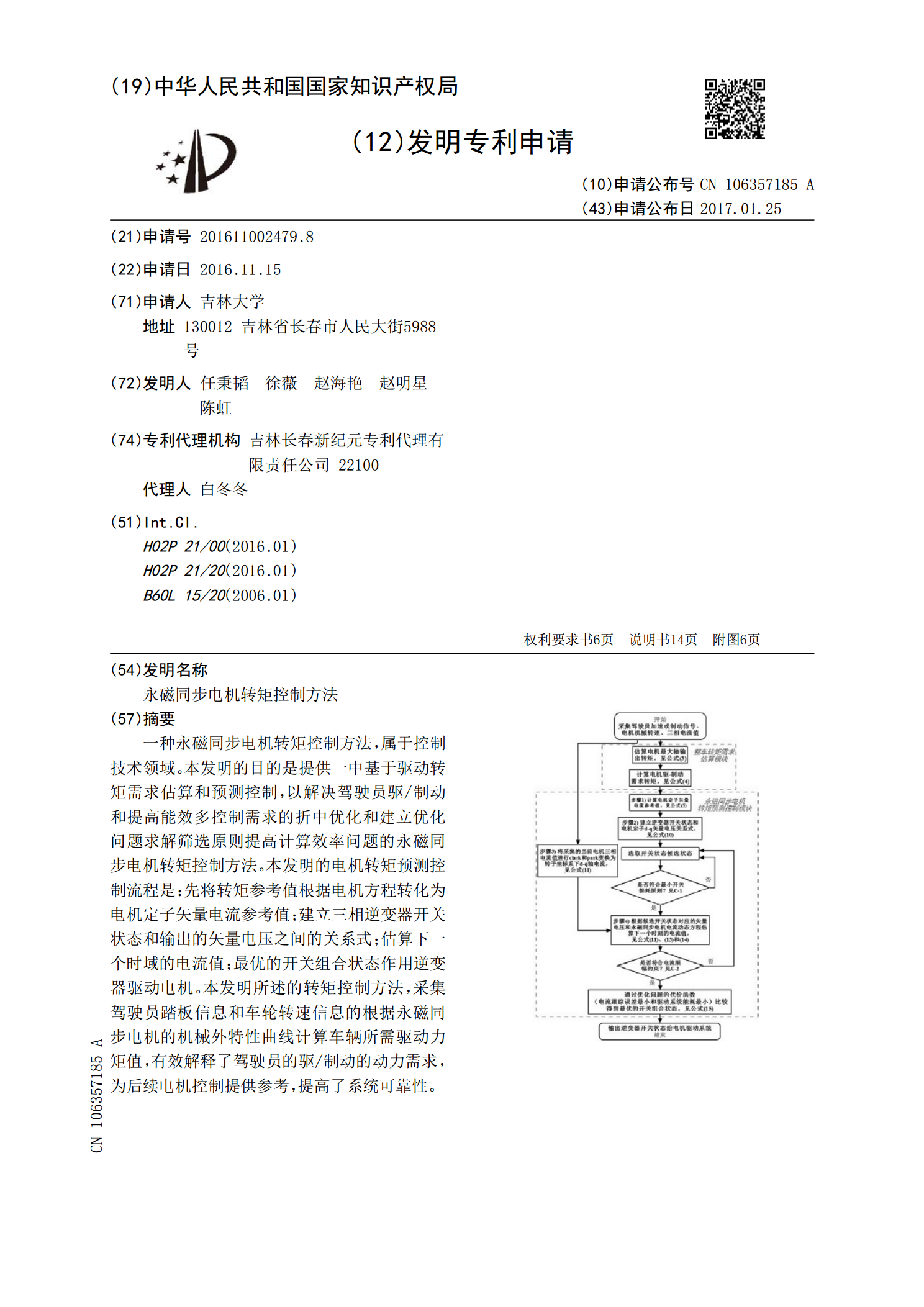
一种永磁同步电机转矩控制方法,属于控制技术领域。本发明的目的是提供一中基于驱动转矩需求估算和预测控制,以解决驾驶员驱/制动和提高能效多控制需求的折中优化和建立优化问题求解筛选原则提高计算效率问题的永磁同步电机转矩控制方法。本发明的电机转矩预测控制流程是:先将转矩参考值根据电机方程转化为电机定子矢量电流参考值;建立三相逆变器开关状态和输出的矢量电压之间的关系式;估算下一个时域的电流值;最优的开关组合状态作用逆变器驱动电机。本发明所述的转矩控制方法,采集驾驶员踏板信息和车轮转速信息的根据永磁同步电机的机械外特