
一种智能网联机器人道路清扫系统.pdf

一只****iu

1/5

2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能网联机器人道路清扫系统.pdf
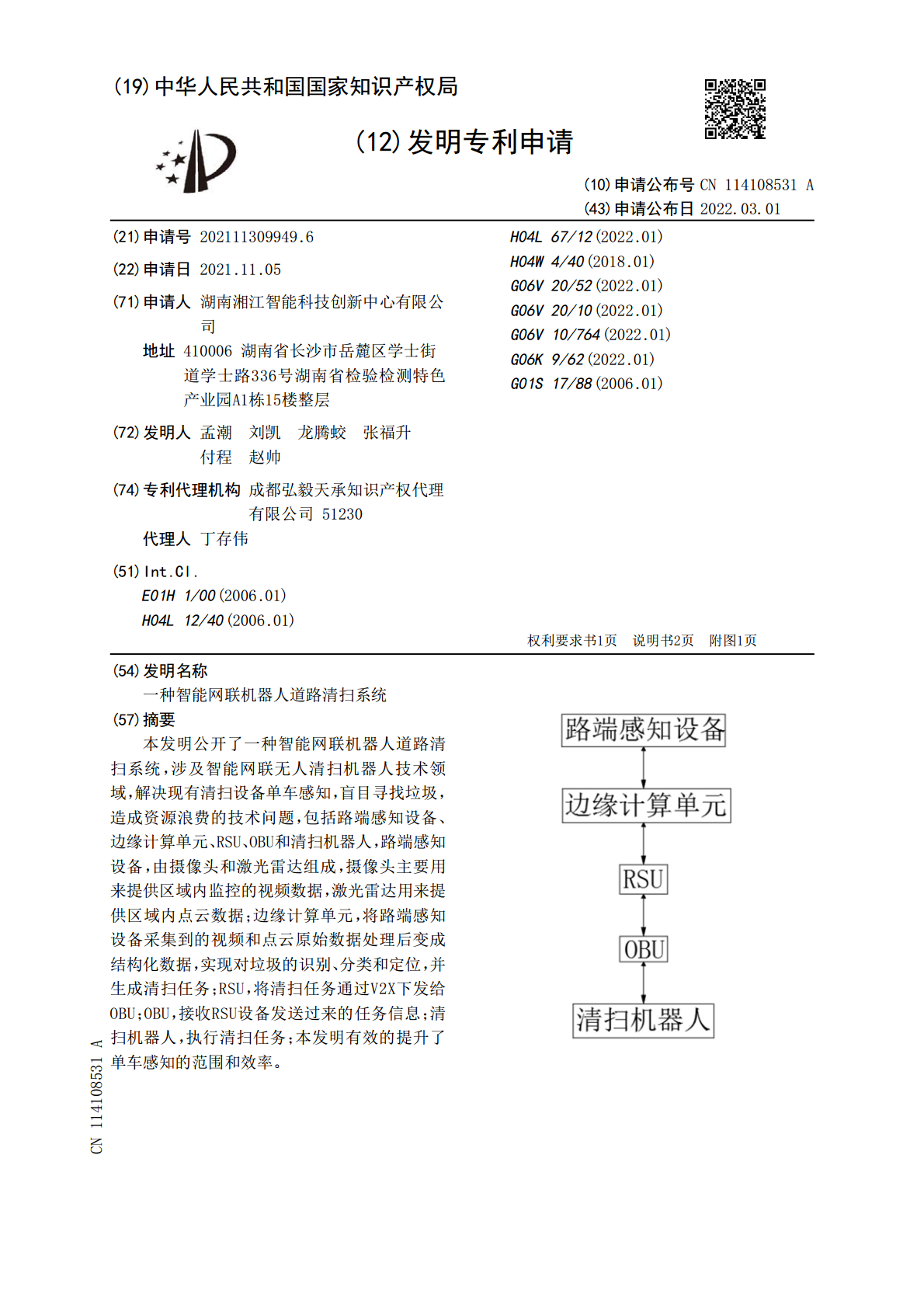
本发明公开了一种智能网联机器人道路清扫系统,涉及智能网联无人清扫机器人技术领域,解决现有清扫设备单车感知,盲目寻找垃圾,造成资源浪费的技术问题,包括路端感知设备、边缘计算单元、RSU、OBU和清扫机器人,路端感知设备,由摄像头和激光雷达组成,摄像头主要用来提供区域内监控的视频数据,激光雷达用来提供区域内点云数据;边缘计算单元,将路端感知设备采集到的视频和点云原始数据处理后变成结构化数据,实现对垃圾的识别、分类和定位,并生成清扫任务;RSU,将清扫任务通过V2X下发给OBU;OBU,接收RSU设备发送过来的
一种智能清扫机器人.pdf
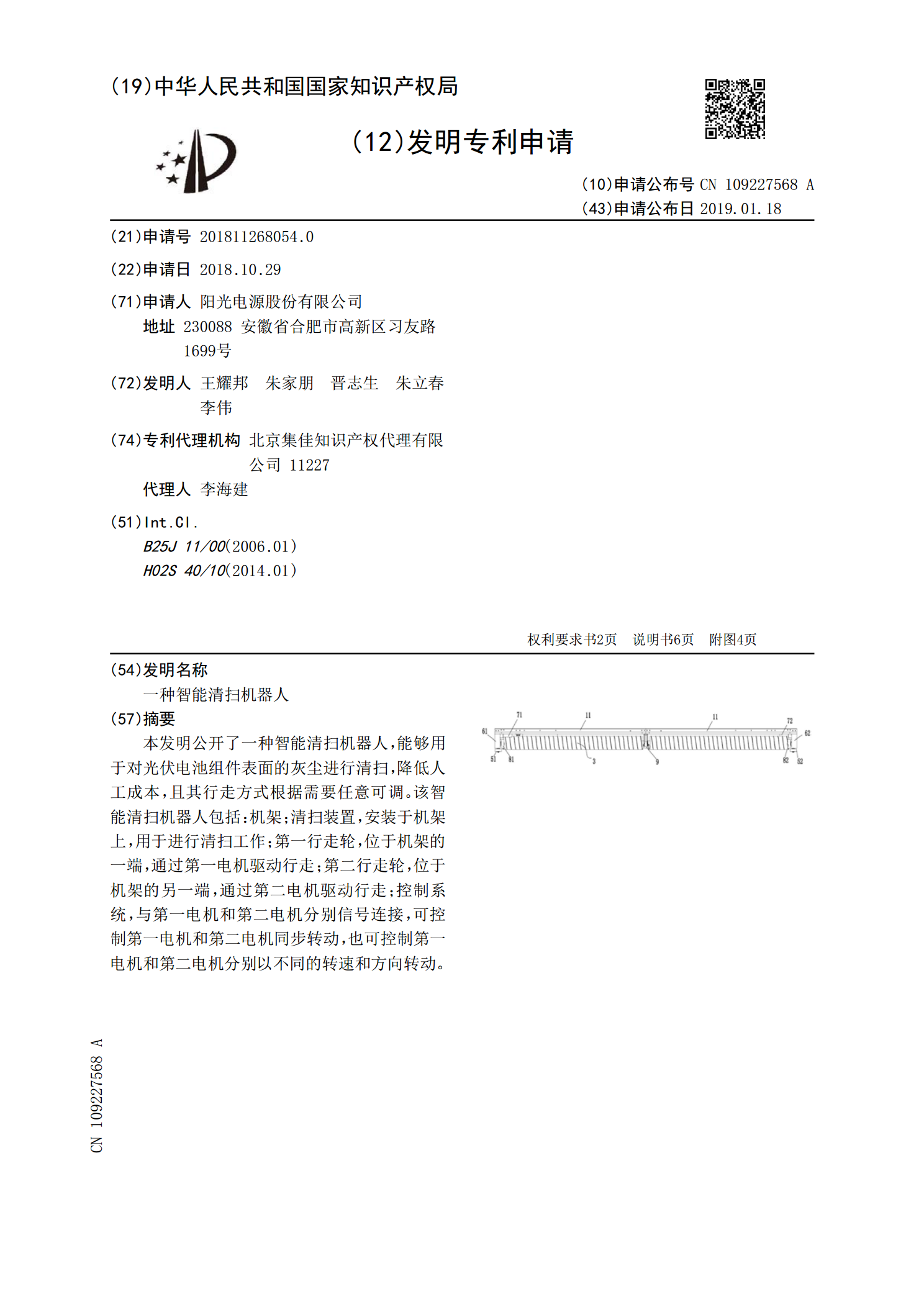
本发明公开了一种智能清扫机器人,能够用于对光伏电池组件表面的灰尘进行清扫,降低人工成本,且其行走方式根据需要任意可调。该智能清扫机器人包括:机架;清扫装置,安装于机架上,用于进行清扫工作;第一行走轮,位于机架的一端,通过第一电机驱动行走;第二行走轮,位于机架的另一端,通过第二电机驱动行走;控制系统,与第一电机和第二电机分别信号连接,可控制第一电机和第二电机同步转动,也可控制第一电机和第二电机分别以不同的转速和方向转动。
一种智能清扫机器人.pdf
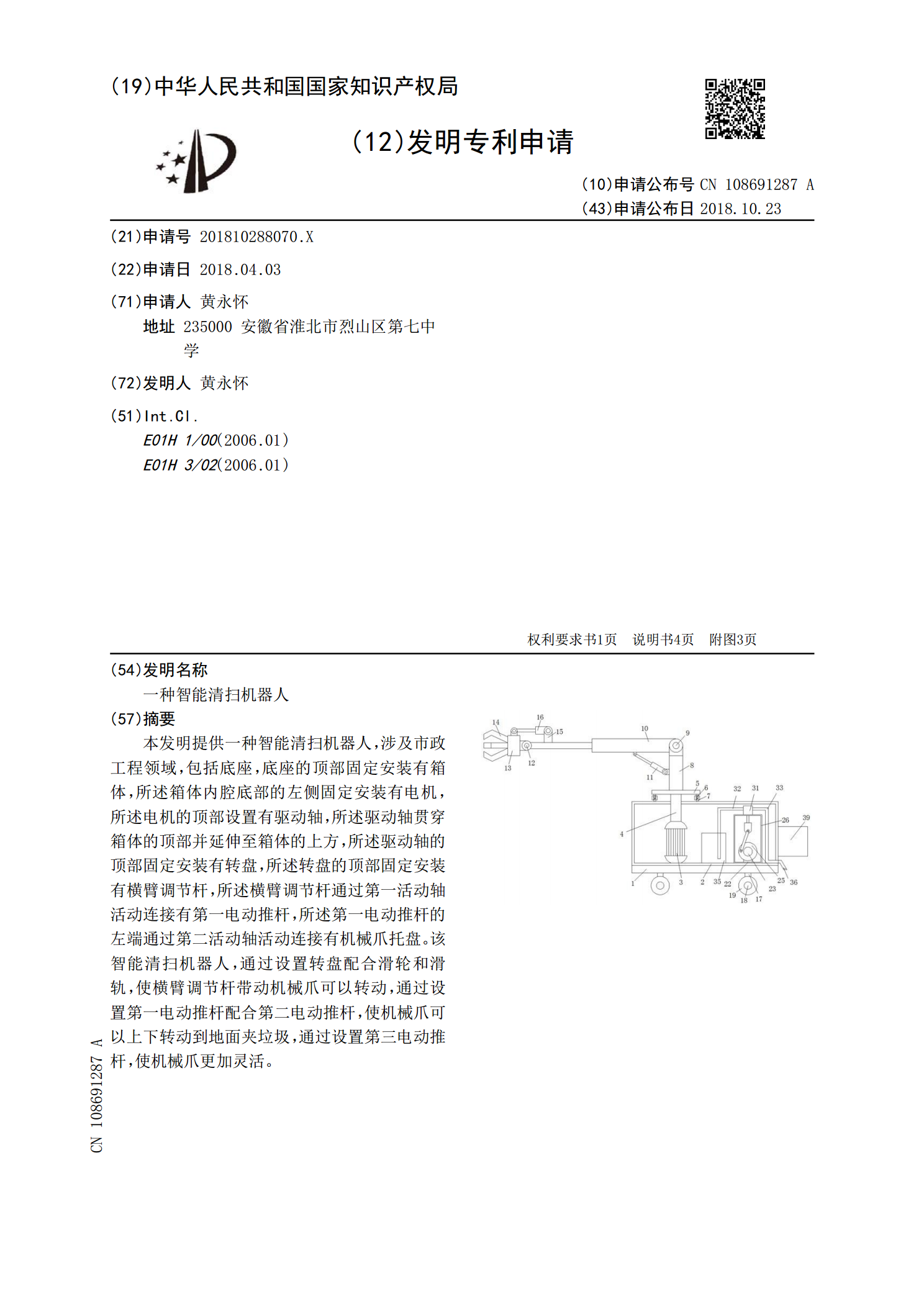
本发明提供一种智能清扫机器人,涉及市政工程领域,包括底座,底座的顶部固定安装有箱体,所述箱体内腔底部的左侧固定安装有电机,所述电机的顶部设置有驱动轴,所述驱动轴贯穿箱体的顶部并延伸至箱体的上方,所述驱动轴的顶部固定安装有转盘,所述转盘的顶部固定安装有横臂调节杆,所述横臂调节杆通过第一活动轴活动连接有第一电动推杆,所述第一电动推杆的左端通过第二活动轴活动连接有机械爪托盘。该智能清扫机器人,通过设置转盘配合滑轮和滑轨,使横臂调节杆带动机械爪可以转动,通过设置第一电动推杆配合第二电动推杆,使机械爪可以上下转动到

用于智能网联云控系统中的智能网联车载系统.pdf
本申请公开了一种用于智能网联云控系统中的智能网联车载系统,该智能网联车载系统可以支持至少两种通信行业标准类型的数据。通过通讯模块支持不同通行行业标准数据的特性,本申请可以传输不同通讯接口数据的需求,为车辆接入蜂窝网联,实现V2X协同感知,通过通讯整合、实时决策为智联网联车提供高效安全的信息服务。

一种机器人清扫系统.pdf
本发明属于机器人技术领域,特别涉及一种机器人清扫系统。一种机器人清扫系统,包括控制器、电动机、电机驱动器、距离传感器、速度传感器、音乐播放器和清扫旋转臂,所述的电动机通过电机驱动器与控制器相连接,电动机与清扫旋转臂相连接,距离传感器、速度传感器、音乐播放器分别于控制器相连接。